基于人工鱼群算法的分数阶PIλDμ控制器设计
2018-02-09张震潘晖缪伟彬
张震,潘晖,缪伟彬
(1.上海电力学院自动化工程学院,上海 200090;2.上海新华控制技术集团科技有限公司,上海 200241)
0 引言
现实世界中,许多动态系统一般为分数阶模型,用分数阶模型描述效果要比整数阶更加精确。随着计算机科学的飞速发展,近年来,人们不仅仅从理论上研究分数阶,而且越来越多的领域开始应用分数阶,例如,自动化、电信、机械、建筑等行业[1-2]。随着对控制优化精度的追求,对分数阶控制的研究已成必然,但对电站控制系统的分数阶应用研究较少。电站控制系统涉及设备多、系统庞大、生产过程较为复杂,所以保持生产稳定高效地运行十分必要。
分数阶PIλDμ控制器是由I.Podlubny[3]提出的,是对普通整数阶PID控制器的拓展,相比而言增加了两个可调参数,扩大了参数整定的范围。目前已有学者对参数整定与优化进行了一定的研究,如,薛定宇等人研究了基于最优性能指标的参数整定[4],相位裕量和幅值裕量同样也可用于设计分数阶控制器[5],随机搜索算法[6]、极点阶数搜索法[7]等均可应用于分数阶控制器参数整定及优化。上述研究所设计的分数阶控制器都能取得良好的控制效果和鲁棒性。
本文尝试将分数阶PID控制器应用于电站控制领域。目前有很多分数阶PID控制器设计方法需要计算各种时域和频域的性能指标,对于参数调优的过程,这是一个复杂且结果难以令人满意的过程。单纯形法是一种在求解线性规划问题的方法,虽然理论趋于完善,但计算过程和迭代次数较为繁琐。人工鱼群算法作为群体智能优化算法的一种,已成为当前的研究热点之一。因其鲁棒性好、易于实现等优势,在多个领域已取得较好的效果。随着对研究的加深,人工鱼群算法必然会应用至更多的领域。本文拟采用人工鱼群算法对分数阶控制器参数进行整定及优化,在全局搜索中既保证收敛速度又无需其他约束条件,并将其应用于具有分数阶模型的电站超临界机组燃料量与中间点压力的热工过程控制系统的设计中。
1 人工鱼群算法
1.1 人工鱼群算法简介
人工鱼群算法是群智能优化算法的一种,于2002年由李晓磊等[8]提出的一种随机全局优化算法。一般情况下水域中营养物质含量越高的地方鱼的生存数量越多,故该算法是根据模拟鱼的觅食、聚群及追尾行为来实现寻优的。该算法具有避免局部最优的能力,无需目标函数的特殊信息,故具有较强的自适应能力和较强的鲁棒性。
1.2 目标函数的选取
在控制过程中,通常可以采用误差积分指标作为衡量控制系统性能好坏的指标。目前常用的误差性能指标有ISE、ITSE、IAE及ITAE,依照不同的性能指标进行控制器参数整定时,最终得到的控制效果是不同的。其中IAE指标可以抑制较小偏差,ISE侧重于抑制较大的偏差,ITAE可以减少调节时间,而ITSE在控制较大动态偏差的同时还可以缩短调节时间。
对于不同的目标准则,优化的控制参数结果不同,效果也不一样。为获得更优的控制器参数,本文采用广义误差绝对值乘时间积分(GITAE)准则[9]作为目标函数。GITAE准则将误差变化率加入其中,可获得更优的响应曲线并提高幅值稳定裕度,如式(1)所示。

其中,e为误差函数,为误差变化率,τ为延时,TE为对象响应的特征时间。
1.3 人工鱼群算法的流程
人工鱼群算法主要是通过鱼群的三种行为来进行优化的:
觅食行为:个体鱼Xi在当前的感知范围V内随机搜索一个状态Xj,通过食物浓度判断是否符合前进方向。符合则进步如下式(2),Step为最大移动步长,V为鱼群的感知范围,反之若长时间未找到移动方向则最终选择随机移动Xv。

聚群行为:搜索当前邻域内的鱼群数目n,确定当前中心位置Xa,若当前食物数量较多且在鱼群的拥挤程度Delta内则向Xa移动,否则执行觅食行为。
追尾行为:搜索当前邻域内的食物数量最多的人工鱼Xmax,通过在Xmax处的鱼群拥挤程度Delta来决定是否前进,否则继续执行觅食行为。
依据以上行为状态选择及定义的目标函数变化情况,鱼群会在符合条件要求的区域内聚集,并将优化过程中最优人工鱼状态保存在公告板内。具体的人工鱼群算法流程如图1所示。
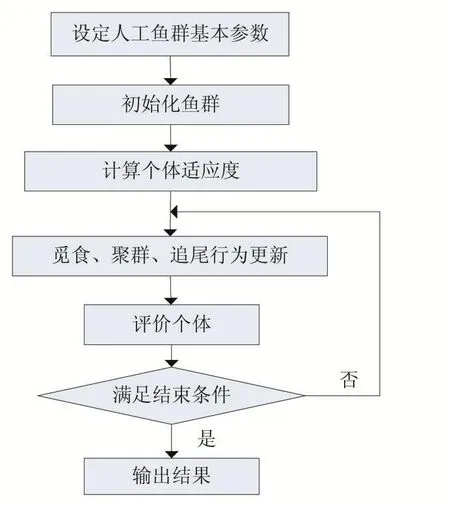
图1 人工鱼群算法流程图
2 分数阶PIλDμ控制器的设计
2.1 分数阶相关理论
目前,常见的分数阶微积分定义主要有三种,分别是 Grünwald-Letnikov(G-L)定义、Cauchy积分定义和Riemann-Liouville(R-L)定义。其中应用最为广泛的是G-L定义。

其中,α为分数阶微积分的阶次为二项式系数;h为步长为分数阶微积分算子,其定义为:
根据G-L公式可以计算出较为精确的分数阶微积分,但是在控制系统研究中存在一定的局限性。在实际的应用中,一般很难直接计算分数阶系统方程的数值解,因此需要通过采用滤波器的算法去逼近滤波器。目前应用在分数阶微积分的滤波器近似算法有连分式近似、Charef近似与Oustaloup近似等。一般的Oustaloup算法在频段两端处表现效果较差,故本文采用改进的Oustaloup滤波器方法[10]将分数阶模型近似以便设计传统整数阶PID控制器,依旧选定拟合频率段为,则基本的分数阶算子模型为:

其滤波器的零极点表达式为:

其中,α为分数阶的阶次;N为滤波器的阶次;b、d为可调参数,一般可以分别取10、9。
2.2 分数阶PID控制器
目前常见的分数阶控制器主要有TID控制[11]、CRONE控制器[12]、PIλDμ控制器和超前滞后补偿器[13]。PIλDμ控制器与传统的整数阶PID控制器不同之处是多了两个可调参数积分阶次λ和微分阶次μ,使得可选择的范围更加广阔,理论上能够提高控制的精度,但同时增加了参数整定的难度。类比传统PID控制器,其传递函数表达式为:

如上式(7)所示,虽然分数阶PID控制器需要整定五个参数,但是可借鉴传统PID整定的方法。J.F.Leu采用ISE性能指标整定出PIλDμ控制器参数[14],Z-N整定法同样可应用于设计PIλDμ控制器[15],陈阳泉教授采用鲁棒PID自整定方法进而确定了PIλDμ控制器的参数[16]。本文则采用人工鱼群算法寻优PIλDμ控制器的参数。
2.3 基于人工鱼群算法的分数阶PID控制器设计
在进行人工鱼群算法整定参数时,不仅要考虑到分数阶PID控制器的控制效果,整定参数的时间也必须考虑到。人工鱼群算法虽然可避免局部极值的产生,但由于人工鱼的数量和视野的随机性,存在加大搜索时间的可能性。为增强算法的运行效率,避免不必要的时间浪费,本文通过限制人工鱼种群的初始位置,减少迭代次数,适当增加鱼群的视野避免鱼群在局部极值出搜索造成的时间浪费。
基于人工鱼群算法的分数阶PID控制器设计步骤如下:
Step1:初始种群设定:若人工鱼的初始位置随机产生,将会影响搜索时间和迭代次数。为避免种群在局部极值的时间浪费,根据单纯形法寻优的参数确定人工鱼种群的初始位置。
Step2:目标函数设计:目标函数是基于人工鱼群算法设计的控制器效果的依据,直接影响控制器的性能。本文采用广义误差绝对值乘时间积分(GITAE)准则作为目标函数,如式(1)。
Step3:人工鱼群参数设定:根据实际情况的经验确定鱼群的规模、迭代次数、人工鱼的感知范围、拥挤程度的门限、觅食行为的试探次数以及决策变量。
Step4:运行人工鱼群算法,执行觅食、聚群和追尾行为,经过迭代得出近似最优解,反复修正最后得到最优解。
3 电站应用
本文选取电站热工控制系统,以超临界机组中燃料量与中间点压力之间的分数阶传递函数[17]为研究对象进行应用研究,即式(8)。为验证分数阶PID控制器的性能,选取传统整数阶PID控制器和分数阶PID控制器进行分析对比。

若直接对分数阶对象设计控制器较为困难,故需要将分数阶对象近似并进行降阶处理。本文采用改进的Oustaloup算法对分数阶模型进行近似,利用次最优模型降阶算法[18],通过在JISE目标函数引入新的误差信号h(t)=w(t)e(t),定义出新的ISE指标即式(9)。

因为降阶模型含有时间延迟项,所以对延迟项采用Pade近似。最终可以得出其降阶模型。

根据降阶模型式(10)采用Wang-Juang-Chan算法[19],即下式(11),设计出最优ITAE准则的整数阶PID控制器。

为了考察人工鱼群算法的性能,基于最优GITAE误差准则,通过单纯形法直接搜索最优值,得到分数阶PIλDμ控制器。

本文采用GITAE误差准则作为目标函数,通过人工鱼群算法寻取其最小值来得到分数阶PIλDμ控制器的五个参数。设置迭代次数K=50,鱼群规模N=50,人工鱼的感知范围V=0.5,拥挤程度的判断门限Delta=0.3,觅食行为的试探次数L=30,并设置好决策变量的上下限。将鱼群的初值设置为通过单纯形法优化的参数,可以加快搜索速度,避免浪费搜索时间。
最终得到分数阶PIλDμ控制器的五个参数,故控制器传递函数为:

经过仿真得到G()s在上述三种控制器下的阶跃响应如图2所示。从图中可以看出,分数阶控制器控制效果要比整数阶PID控制器好,可以有效抑制超调量的产生。
从表中可以看出,无论从调节时间还是超调量来看,分数阶PID控制较整数阶PID控制器效果要好。很显然,应用人工鱼群算法寻优的控制系统参数要优于常规方法,能够在保持调节时间的同时不产生超调量。
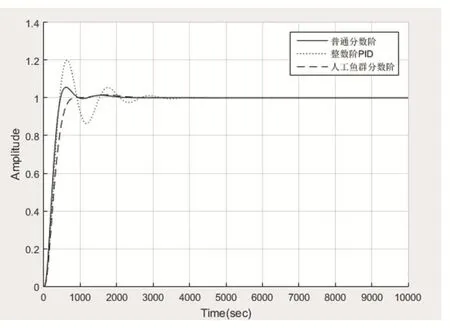
图2 不同控制器下的闭环系统阶跃响应曲线
如表1所示,将三种控制器的性能指标进行对比。
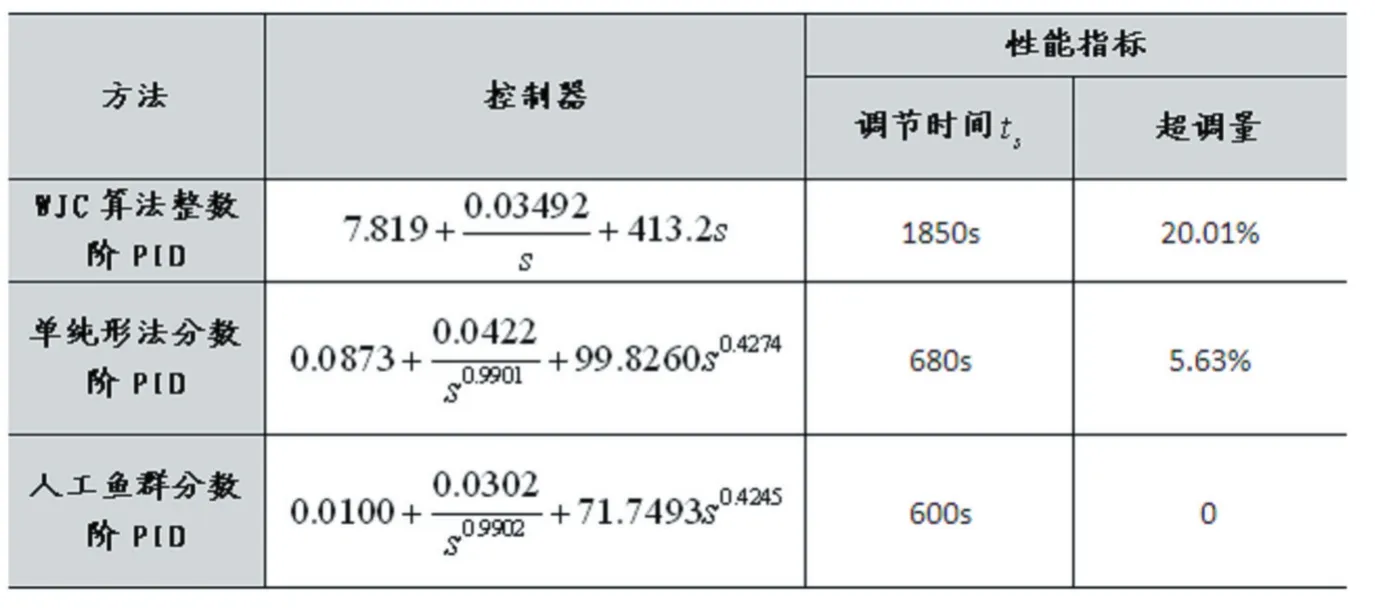
表1 各种算法性能指标对比表
4 结语
本文针对分数阶控制系统提出了一种利用人工鱼群设计分数阶PID控制器的有效方法。采用新的误差目标准则,并应用至电站热工控制系统。虽然应用分数阶PID控制器使得参数整定增加了难度,但人工鱼群算法用于搜索最优分数阶PID控制的参数,采用GI⁃TAE性能指标为目标函数得到的控制器参数能达到令人满意的效果。仿真研究结果表明,分数阶PID控制器较整数阶PID控制器效果更加出色,在保证调节时间的同时能够抑制超调量的产生。
[1]钱兆刚,田丽,周红艳,王勇.汽车防抱制动系统的分数阶PID控制算法研究[J].重庆工商大学学报(自然科学版),2014,31(10):29-34.
[2]王亚峰.空调房间温度模糊分数阶PID控制器设计及其性能分析[D].兰州理工大学,2014.
[3]Podlubny I.Fractional-Order Systems and PI/λD/μ Controllers[J].Automatic Control IEEE Transactions on,1999,44(1):208-214.
[4]Xue D,Zhao C,Chen Y Q.Fractional Order PID Control of a DC-Motor with Elastic Shaft:a Case Study[C].American Control Conference.IEEE,2006:6.
[5]Zhao C,Xue D,Chen Y Q.A Fractional Order PID Tuning Algorithm for a Class of Fractional Order Plants[C].Mechatronics and Automation,2005 IEEE International Conference.IEEE,2005:216-221 Vol.1.
[6]李大字,刘展,靳其兵,曹柳林.分数阶控制器参数整定策略研究[J].系统仿真学报,2007,(19):4402-4406.
[7]严慧,于盛林,李远禄.分数阶PI~λD~μ控制器参数设计方法——极点阶数搜索法[J].信息与控制,2007,(04):445-450.
[8]李晓磊,邵之江,钱积新.一种基于动物自治体的寻优模式:鱼群算法[J].系统工程理论与实践,2002,(11):32-38.
[9]曾振平,陈增强,袁著祉.基于一种新的目标准则的PID控制器参数优化[J].计算技术与自动化,2003,(04):1-4.
[10]Xue D,Zhao C,Chen Y.A Modified Approximation Method of Fractional Order System[C].IEEE International Conference on Mechatronics and Automation.IEEE,2006:1043-1048.
[11]Lurie B J.Three-Parameter Tunable Tilt-Integral-Derivative(TID)Controller[J],1994.
[12]Oustaloup A,Mathieu B,Lanusse P.The CRONE Control of Resonant Plants:Application to a Flexible Transmission[J].European Journal of Control,1995,1(2):113-121.
[13]Raynaud H F,Zergaınoh A.State-Space Representation for Fractional Order Controllers[J].Automatica,2000,36(7):1017-1021.
[14]Leu J F,Tsay S Y,Hwang C.Design of Optimal Fractional-Order PID Controllers[J].Journal of the Chinese Institute of Chemical Engineers,2002,33(2):193-202.
[15]Valério D,Costa J S D.Tuning of fractional PID Controllers with Ziegler-Nichols-Type rules[J].Signal Processing,2006,86(10):2771-2784.
[16]Chen Y Q,Moore K L,Vinagre B M,et al.Robust PID Controller Autotuning with a Phase Shaper[C].First IFAC Workshop on Fractional Differentiation and Its Applications.2004:162-167.
[17]谷俊杰,侯雅飞,王鹏.分数阶模型在电厂控制系统中的应用[J].热力发电,2016,45(04):106-110.
[18]DINGYÜ XUE,DEREK P.ATHERTON.A Suboptimal Reduction Algorithm for Linear Systems with a Time Delay[J].International Journal of Control,1994,60(2):181-196.
[19]F.S.WANG,W.S.JUANG,C.T.CHAN.Optimal Tuning of Pid Controllers for Single and Cascade Control Loops[J].Chemical Engineering Communications,1995,132(1):15-34.