运动滑板数学模型的建立及动力学分析
2018-02-06胡仕成熊豪利
胡仕成 曾 强 熊豪利
(1.中南大学机电工程学院,湖南长沙410000;2.高性能复杂制造国家重点实验室,湖南长沙410000)
0 引言
滑板运动起源于冲浪运动,第一块滑板诞生于19世纪50年代。常见滑板由一块板、两个支架、两个基座和四个轮组成,支架与基座连接,固定在车板上,支架基座组件是滑板最重要的结构部件[1],如图1所示。
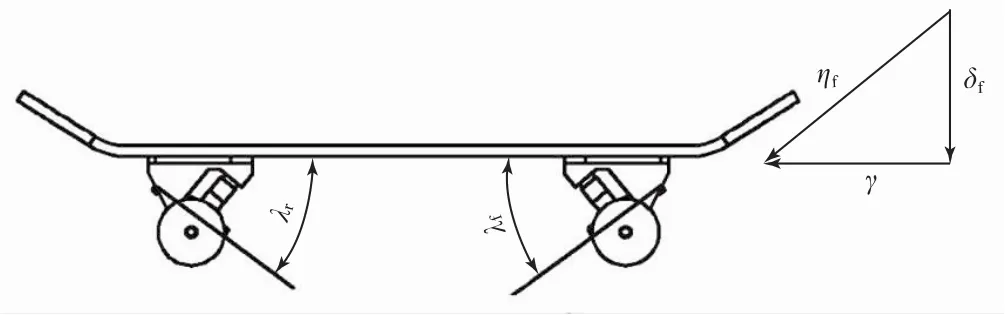
图1 滑板二维正视图
20世纪70年代末80年代初,M.Hubbard[2-3]提出了滑手在滑板上运动的数学模型,运用动力学的基本定理,得出模型的运动方程。A.S.Kuleshov[4]在M.Hubbard提出的模型基础上进一步分析,使用Gibbs-Appell形式的运动方程得到滑板运动的数学模型。本文利用ADAMS软件建立滑板刚柔耦合模型,进行运动学分析,测量板面倾斜角度与车轮旋转角度,代入数学模型,验证动力学模型的可行性。
1 数学模型的建立
假设滑手在整个运动过程中,板面倾斜角度为γ,引入OXYZ固定坐标系,O为原点,位于平面的某个点上,轴线OZ引导为垂直于运动平面;线段AB由其中心坐标X和Y确定,角度θ由该线段和固定轴OX确定;当板倾斜角度γ时,前轴顺时针旋转角度δf,同时后轴逆时针旋转角度δr,如图2、图3、图4所示,那么:
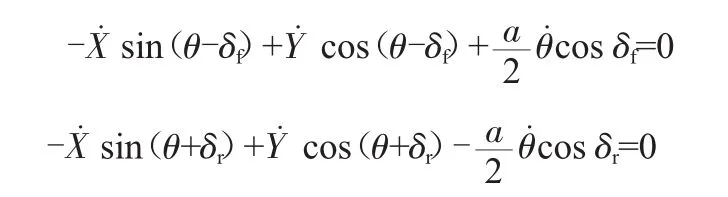
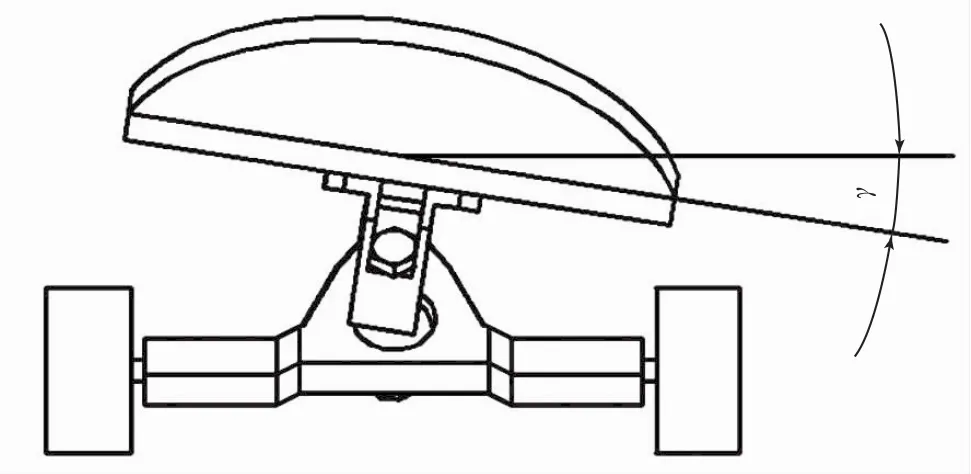
图2 滑板板面倾斜示意图
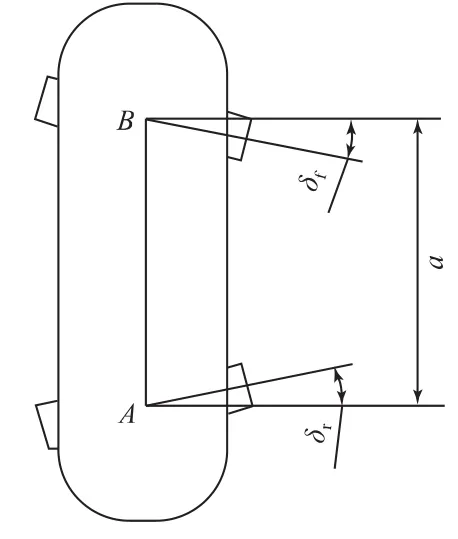
图3 滑板各轮轴偏转示意图
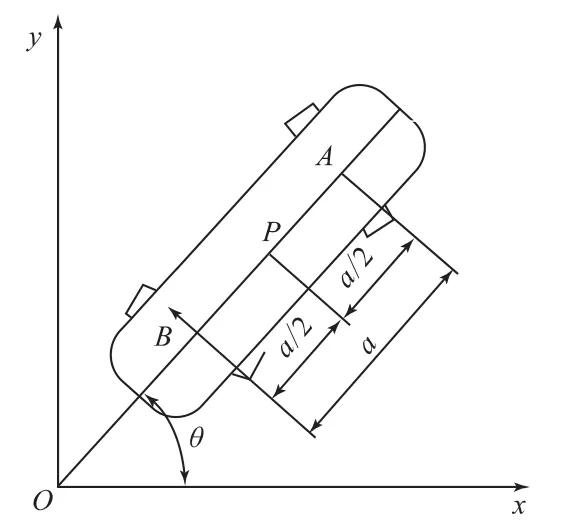
图4 滑板0xy坐标系
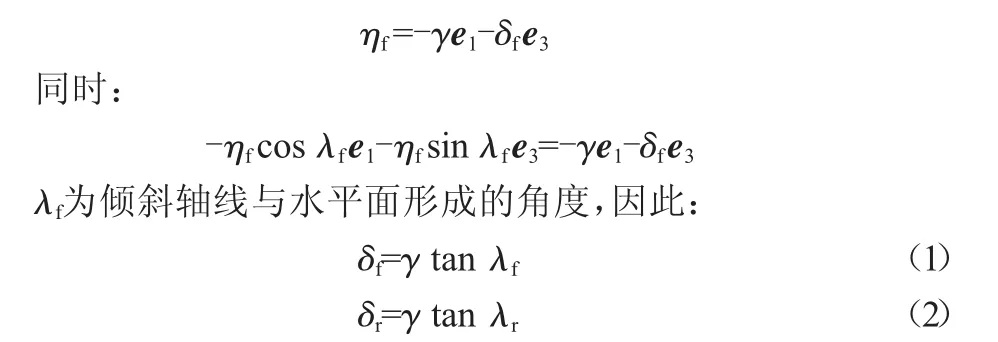
推导将滑板倾斜度和轴线转动角度关联起来的公式,引用微量旋转理论,考虑滑板前轴围绕倾斜轴线的微量旋转ηf;轴线围绕矢量e1转动角度-γ,围绕矢量转动角度-δf;得:
2 动力学模型的建立
2.1 滑板虚拟样机的建立
利用三维建模软件SolidWorks建立滑板各零件的实体模型,然后进行无干涉装配,导入ADAMS,该系统需要添加的约束分别为:(1)滑板板面与基座固定;(2)两侧螺杆头与基座固定;(3)滑板支架顶部半球与基座采用圆柱副;(4)螺杆与螺帽固定;(5)滑板支架与轮子采用旋转副。建立的滑板虚拟样机如图5所示。
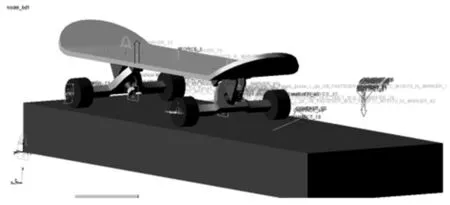
图5 滑板虚拟样机
2.2 基于ADAMS与ANSYS柔性体联合仿真
ADAMS/Flex模块允许在ADAMS模型中根据模态频率数据创建柔性体部件[5-6]。PU垫材料为氯丁橡胶,其材料属性定义如下:弹性模量E=1.5e6 Pa,泊松比μ=0.49,密度ρ=1.25 kg/m3。单元类型:solid185,对其进行网格划分。根据实际接触,建立主节点与刚性区域,生成MNF文件[7],导入ADAMS。
2.3 确定接触载荷与阶跃力函数
滑板基座、支架、螺杆、螺母等材料为钢材,PU垫、轮为橡胶材料。由上所述,确定各接触副的参数,表1为ADAMS中部分材料的碰撞参数,代入各项参数。
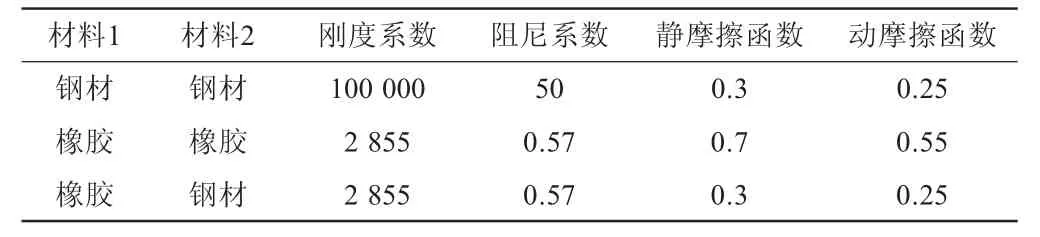
表1ADAMS部分材料碰撞参数
定义三个作用力,Force1水平作用于板面中心位置,提供滑板直行动力;Force2垂直作用于板面中心位置,模拟人给滑板的压力;Force3垂直作用于板面边缘,为滑板提供偏载。三个作用力STEP函数为:
Force1:STEP(time,0,20,0.5,0)
Force2:300*time
Force3:STEP(time,0.5,300,3,0)
2.4 仿真结果分析
经过仿真计算,得到板面倾斜角度γ随时间变化曲线图,如图6所示。由图可知,0.5 s前,滑板平稳向前运动,板面倾斜角度保持在0°,平行地面;0.5 s后,板面在受到偏载后发生倾斜,随时间变化倾斜角度趋于稳定,得到板面倾斜角度γ=90°-86.55°=3.45°。
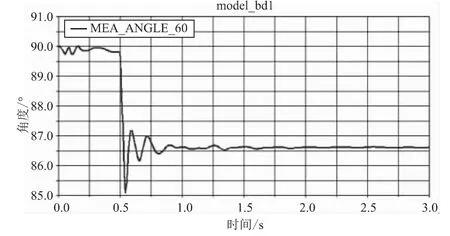
图6 板面倾斜角度γ随时间变化图
与此同时,得到了在板面倾斜状态下,前轴顺时针旋转角度δf,同时后轴逆时针旋转角度δr随时间变化曲线图,如图7、图8所示。由图可知,前轴与后轴都发生了相应的偏转,偏转角度为δf=2.9°,δr=3.7°。
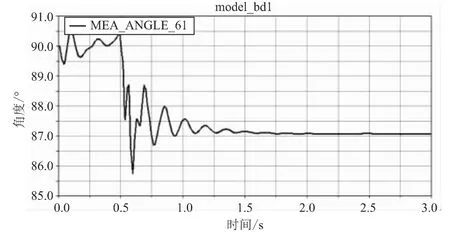
图7 前轴旋转角度δf随时间变化图
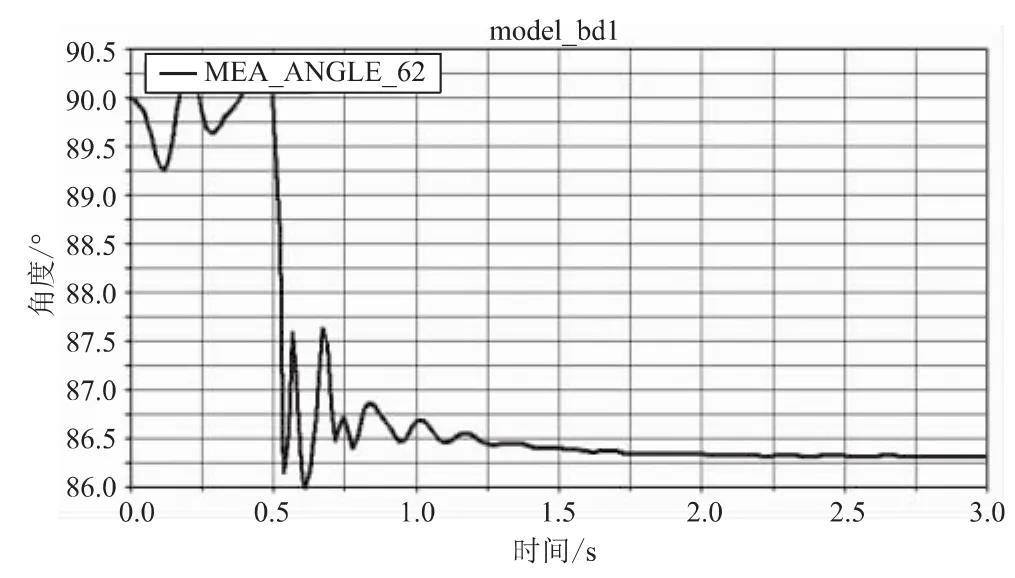
图8 后轴旋转角度δr随时间变化图
实测得λf=λr=42.3°,将λf、γ代入式(1)、(2)中,理论上可得δf=δr=3.14°,计算结果与仿真结果偏差不明显。从图中可以看出,滑板在0.5 s后,前后轴旋转角度都趋于一个稳定值,与实际情况相符。综上,验证了模型的可行性。
3 结论
本文从滑板的结构出发,采用微量旋转理论,得到滑板面倾斜角度与车轮旋转角度的函数关系,利用刚柔耦合建立多体动力学仿真,得到以下结论:
(1)根据矢量加法法则,得到前后轴旋转角度δf、δr与γ的数学关系。
(2)滑板前后轴旋转仿真结果与数学模型计算结果偏差不明显,且仿真过程中滑板前后轴旋转角度都趋于一个稳定值,与实际情况相符,验证了模型的可行性。
[1]胡小明,虞重干.体育休闲娱乐理论与实践[M].北京:高等教育出版社,2004.
[2]HUBBARD M.Skateboard-A Human Controlled Non-Holonomicsystem[J].Philosophical Transactions of The Royal Society,1979,46:931-936.
[3]HUBBARD M. Human control of the skateboard[J].Journal of Biomechanics,1980,13(9):745-754.
[4]KULESHOV A S.Nonlinear Analysis of the Skateboard Dynamics[J].Journal of Biomechanics,2007,40:400.[5]郑建荣.ADAMS——虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
[6]刘小平,郑建荣,朱治国,等.SolidWorks与ADAMS/View之间的图形数据交换研究[J].机械工程师,2003(12):26-28.
[7]刘晓东,章晓明.基于ADAMS与NASTRAN的刚柔耦合体动力学分析方法[J].机械设计与制造,2008(2):168-170.