基于Matlab/Simulink的风储孤网系统仿真研究
2018-02-05赵思雯赵叙龙
李 山,叶 鹏,何 淼,赵思雯,赵叙龙
(沈阳工程学院 a.研究生院;b.电力学院,辽宁 沈阳 110136)
作为新能源发展最有效、最具开发条件的项目,风力发电技术由于具有清洁、友好等特点而年增长率一直保持在两位数的百分比水平[1]。但是,由于大电网接纳风电的能力有限,导致风电在大规模接入大电网的过程中存在 “并网难”和“弃风”等问题,而这些问题已成为制约风电发展的重大难题[2-3]。针对风电大规模并网过程中存在的“并网难”和“弃风”等难题,国内外相关专家提出基于储能技术的风储联合发电系统[4-5]。近年来,随着储能技术的不断纯熟和储能成本的大幅降低,风储孤网发电技术作为风储联合发电技术的一种有效形式,能够为新能源分散和小规模应用提供较为灵活的运行方式,而逐步受到研究人员的广泛重视[6]。
目前,国内外对风储系统联合运行的研究主要集中在并网位置、运行成本、稳定运行及不同故障特性的控制策略等方面[7-8],而对风储孤网系统的研究相对较少。风储孤网系统稳定运行的核心技术在于风机出力、风机及储能逆变器、储能充/放电转换三者之间的协调控制策略[9-10]。针对风储孤网系统的建模及稳定运行问题,对风储孤网系统建模,并基于Matlab/Simulink仿真平台搭建了风储孤网系统的仿真模型,对单相接地故障两种工况进行仿真实验,通过仿真验证所建立的风储孤网系统模型能够实现系统的稳定运行和故障情况下快速恢复情况。
1 风储孤网系统结构
风储孤网系统的系统构成主要包括风力发电系统、储能单元和负载等。直驱永磁风力发电机组因省去电刷、滑环和齿轮箱等,能够大大减少系统的维护费用并提高系统的可靠性[11-12]。因此,以直驱永磁风力发电机组作为研究对象。风储孤网系统的结构如图1所示。
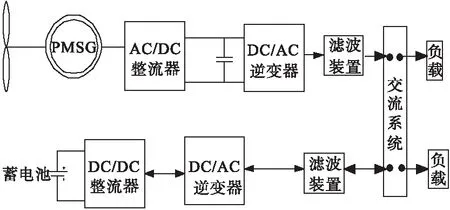
图1 风储孤网系统结构
2 风储孤网系统控制策略及模型
2.1 风力机数学模型
风力机将风能转化成风机机械功率。风机机械转矩Tm为
(1)
风机机械部分方程为
(2)
式中,Te为电磁转矩,Te=1.5npφiqs;np为转子极对数;φ为磁通;iqs为定子电流q轴上的电流分量;

2.2 永磁风力发电机数学模型
在dq坐标系下,永磁风力发电机电气部分的数学模型为
(3)
(4)
式中,uds和uqs分别为定子电压d轴和q轴上的分量;ids和iqs分别为定子电流d轴和q轴上的分量;φ表示磁通;wg为风机机械角速度;Rs和Ls分别为定子电阻和电感。
2.3 背靠背变流器控制策略
风储孤网系统中,风力发电系统背靠背变流器主要包括发电机侧整流器及网侧逆变器,机侧整流器与网侧逆变器之间通过直流侧电容连接。风力发电系统背靠背变流器控制的结构如图2所示。
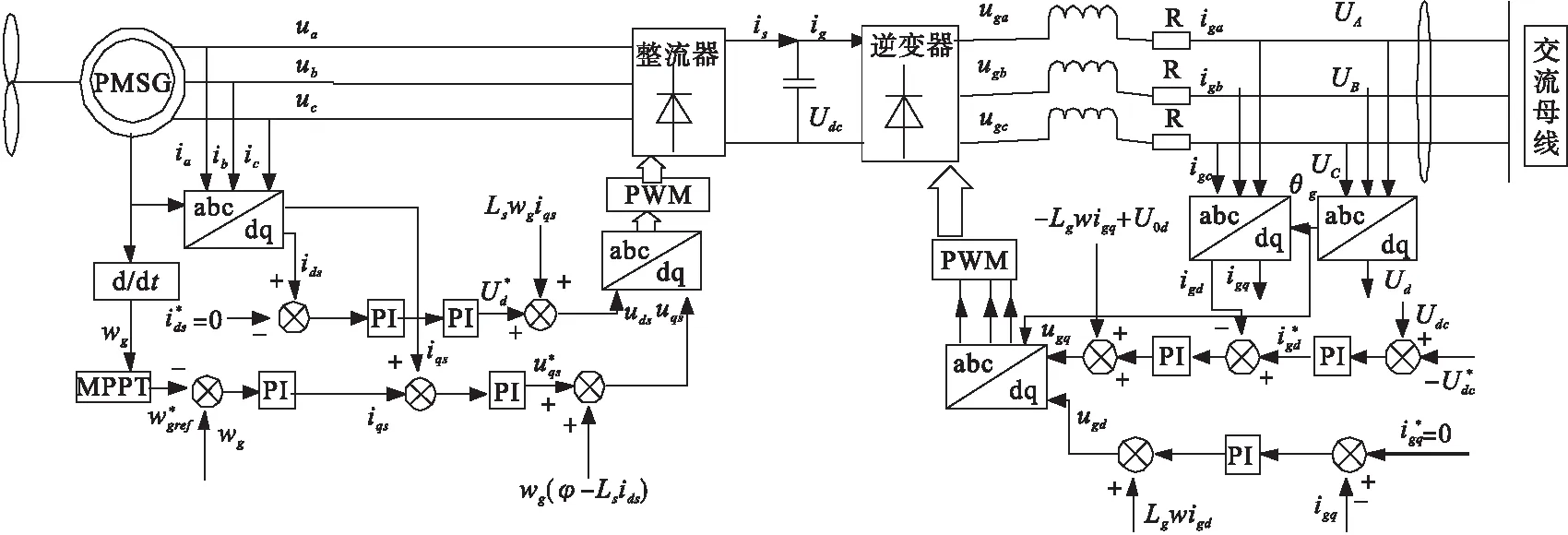
图2 背靠背变流器
2.4 储能单元数学模型及控制策略
储能单元中,储能逆变器和双向DC/DC变流器协同工作,以实现储能单元有功功率的协调控制并维持交流母线侧电压和频率的稳定。双向DC/DC变流器采用电压外环和电流内环的控制策略,储能逆变器采用下垂控制模式[13]。
2.4.1 双向DC/DC变流器控制策略
双向DC/DC变流器连接蓄电池和储能逆变器直流端,担负着蓄电池的充放电控制和调整储能逆变器直流侧电容电压的任务[14]。双向DC/DC变流器充放电控制通常采用电压外环和电流内环的控制策略,如图3所示。

图3 双向DC/DC控制
2.4.2 储能逆变器数学模型及控制策略
储能逆变器采用下垂控制模式,如图4所示[15]。储能单元中,储能逆变器LC滤波电路在dq坐标系下的数学模型为
(5)
(6)
式中,U0d、U0q和i0d、i0q分别为储能逆变器中经LfCf滤波得到的三相电压和三相电流的dq分量;w为交流母线上的角频率;rf和Lf分别为电阻和滤波电感;Cf为滤波电容;Vd、Vq和id、iq分别为储能逆变器输出的三相电压Vabc和三相电流通过abc/dq0变换后的得到的电流的dq分量。
储能逆变器输出瞬时有功功率和无功功率的方程为
(7)
瞬时功率经过一阶低通滤波器可以得到平均功率为
(8)


图4 下垂控制模式
储能逆变器电压外环和电流内环的控制策略如图5所示。

图5 双环控制策略
3 仿真分析
为了验证所建立的风储孤网系统模型的有效性,按照图1和图2中的风储孤网系统的控制框图在Matlab/Simulink平台中进行系统仿真模型的搭建。系统初始值为额定风速12 m/s,风机额定有功功率为25 kW,交流母线侧的负载有功功率为30 kW,无功功率为0 kVar,蓄电池荷电状态的初始值为80%,仿真时间取2 s。为验证交流母线侧发生暂时性单相接地故障后,风储孤网系统能否有效运行,在其他初始条件不变的情况下,1 s时交流母线侧A相发生单相接地故障,故障持续时间为0.05 s,其仿真结果如图6所示。



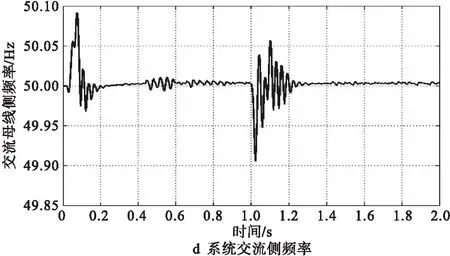



图6 单相故障下风储孤网系统仿真结果
交流母线侧A相单相接地故障下,风储孤网系统仿真结果如图6所示。在1 s之前,系统处于稳定运行状态。由于在1 s时A相发生单相接地故障,在持续时间0.05 s内,交流负载侧输出三相电压中A相电压为0 V,交流负载侧输出三相电流中A相电流变化较大,系统输出的有功功率在单相接地故障期间处于波动状态。交流母线侧A相发生单相接地故障前及故障恢复后,交流侧输出的频率、电压以及电流变化情况分别如图6中的d、e、f所示,在单相接地故障结束后,系统能够快速恢复至稳定运行状态,为维持系统协调稳定运行,储能单元依旧输出功率。仿真结果表明,在系统交流母线侧发生单相接地故障结束后,风储孤网系统能够快速实现系统的稳定运行。
4 结 论
1)建立了风储孤网系统各单元的就地控制策略及模型;
2)根据所提出的风储孤网系统的协调控制策略及模型,基于Matlab/Simulink仿真平台搭建了风储孤网系统的仿真模型,并在单相接地故障工况下进行了风储孤网系统协调控制策略的验证。通过仿真结果分析证明了所提出的风储孤网系统控制策略的有效性。
[1] 彭思敏,王 晗,蔡 旭,等.含双馈感应发电机及并联型储能系统的孤网运行控制策略[J].电力系统自动化,2012,36(23):23-27.
[2] 王建萍,潘庭龙.风光储微网系统孤岛运行控制策略研究[J].可再生能源,2016,34(12):1804-1810.
[3] 郭 力,王 蔚,刘文建,等.风柴储海水淡化独立微电网系统能量管理方法[J].电工技术学报,2014,29(2):113-121.
[4] 刘梦璇,郭 力,王成山,等.风光柴储孤立微电网系统协调运行控制策略设计[J].电力系统自动化,2012,36(15):19-24.
[5] 黄 伟,牛 铭.微电网非计划孤网控制策略分析[J].电力系统自动化,2011,35(9):42-46.
[6] 许志荣,杨 苹,郑成立,等.孤岛型风柴储微电网运行情况分析[J].电网技术,2016,40(7):1978-1984.
[7] 马 皓,林 钊,林燎源.基于多智能体的三相逆变器并联系统功率灵活分配[J].电工技术学报,2017,32(2):216-227.
[8] 王新刚,顾 臻,庄葛巍,等.含多个分布式电源的微电网协调控制[J].华东电力,2014,24(11):2339-2343.
[9] 韩西贵,王灵梅,郭红龙,等.基于多智能体的风电并网协同控制研究[J].可再生能源,2013,31(3):36-39.
[10]胡书举,李建林,许洪华.永磁直驱风电系统变流器拓扑分析[J].电力自动化设备,2008,28(4):77-81.
[11]张 磊,朱凌志,姜达军,等.直驱风电机组模型构建方法及其实现[J].电网技术,2016,40(11):3474-3481.
[12]窦春霞,李 娜,徐晓龙.基于多智能体系统的微电网分散协调控制策略[J].电工技术学报 2015,30(7):125-134.
[13]窦春霞,贾星蓓,李 恒.基于多智能体的微电网中分布式发电的市场博弈竞标发电[J].电网技术,2016,40(2):579-586.
[14]赵添羽.基于Multi-agent-system微电网多模态协调切换控制研究[D].秦皇岛:燕山大学,2015.
[15]李 山,叶 鹏.一种改进的微电网并联逆变器下垂控制策略[J].沈阳工程学院学报:自然科学版,2016,12(4):289-296.
