便携式双模无人侦察机概念设计研究
2018-02-05梁毅辰
梁毅辰
(西安航空学院 飞行器学院,西安 710077)
0 引言
无人机因其无人员伤亡风险,生存能力强,机动性能好,使用方便等特点,在现代战争中有重要作用,也越来越受到各国航空业人士的关注。“全球鹰”“捕食者”“翼龙”等技术先进、对设备要求比较高的大型无人机如雨后春笋一般层出不穷。区域性冲突以及战争中的特种战术行动中,行动组往往需要便于携带,可靠性强的情报收集工具以完成快速战术部署,而大型无人机多部署于营级以上单位,所需地面辅助设施笨重繁杂,无法单兵携带,对于机动战术任务的支援作用无法充分发挥。此外,在日常的警用巡逻,消防火情侦察,自然灾害地区灾情侦察等活动中,便携式无人侦察机相比大型无人机有着部署快,信息反馈及时等特点。在此背景下,由单兵携带的低成本、高可靠性、小包络、轻重量、易操作的无人侦察机具有重要的实战意义。
1 便携式无人侦察机发展概况
国外发达国家对于便携式单兵无人机侦察机已经做了深入的研究,并已经有比较成熟的产品装备部队,在作战中起到了关键作用。

图1 RQ-16无人机
美军的RQ-16无人机[1](见图1)可协助步兵完成侦察、情报收集、火炮校准以及激光照射任务。整套系统总重量小于23kg,可由一个步兵班携带,快速展开部署。其中,无人机的大小近似一个篮球,为了提供足够的续航时间,该无人机由活塞式汽油发动机驱动的涵道风扇产生升力,可垂直起降并悬停,最大飞行速度约74km/h,续航时间约为40min。该无人机可以实现自主控制和导航,也可以实现人工干预以动态调节路线和目标信息,同时具有盘旋凝视功能。
美军的RQ-11B“大乌鸦”无人机(见图2)可以为小型作战单位提供强力的战场态势,感知并通过对机动区域边界的扩展勘测和情报收集用来保护作战部队[2]。该无人机可由单兵携带,可由手抛起飞,快速部署,还可以自动跟踪地面机动车辆执行护航任务,为地面部队传递周边安全情报供排级部队使用。“大乌鸦”质量2.72kg,使用电池驱动,可携带红外摄像机和数据链,滞空时间为90min,由电动机推进,非常安静,因此在100米以上空中飞行时几乎不会被察觉,战场记录显示,大乌鸦损毁几乎都是由失控和故障造成的,很少被敌军击落。

图2 RQ-11B无人机
RQ-20A(见图3)是由美国AeroVironment公司生产的单兵固定翼电动无人机[3-4],主要用于对战场进行监控和情报收集。该无人机采用固定翼常规布局,平直梯形机翼可折叠,外端翼有一定上反角,由单兵手掷起飞,具有全天候作战能力,翼展2.9m,最大起飞重量5.9kg,最大飞行速度83km/h。通过添加太阳能电池板与更加强劲的电动机以及电池,RQ-20A的续航时间预计可达到9小时。

图3 RQ-20A无人机
可以看出,目前现役的小型无人侦察机采用单一的垂直起降/悬浮飞行方式或者固定翼方式飞行,这两种控制方式各有利弊,垂直起降/悬浮方式具有较好的机动性,对于起降场地没有要求,并可以悬浮对目标进行凝视,但飞行速度慢,续航时间短。以RQ-16为例,为了获得较长的续航时间(40min),采用了活塞式发动机,但这样的设计大大增加了其使用噪音,使其进行抵近侦察时易被发现;固定翼飞行方式飞行速度较高,节省燃料,续航时间长,但是无法实现在空中的悬浮,对于目标的侦察不利,同时无法在复杂的地形中(如街道,废墟、厂房内部)飞行。因此,设计一种双模控制无人侦察机可以同时兼顾两种飞行模式的优点,有利于对地侦察。
2 双模无人机发展概况
垂直起降飞行器(Vertical Take-Off and Landing,VTOL)能够以零速度起飞/着陆,具备悬停能力,并能够以固定翼飞机的方式水平飞行。早期开发的试验机类型多种多样,包括尾座式、倾转涵道式、喷气流转向式以及喷气升力发动机式等。各国在20世纪50年代就先后试制了数十种垂直起降飞机,然而大多数都以失败告终。具有代表性的是美国的XFV-1,XFY-1及英国的SC.1等。特别是英国霍克西德利公司成功研制出的AV8鹞式战斗机成为世界上首架成功投入使用的垂直起降飞机。垂直起降飞行器虽具有固定翼飞机速度快、航程远和垂直起降、可悬停作业的优点,但也带来了设计过于复杂、控制困难等弊端,这些因素也是使垂直起降飞行器在20世纪60年代后期发展减缓的重要原因之一。直到20世纪80年代后期,美国的V-22鱼鹰倾转旋翼机给VTOL领域带来了希望。V-22可由两具旋翼驱动垂直起飞,在起飞后旋翼向前倾转,由垂直起降模态转变为固定翼平飞模态,旋翼的动力转变为向前推力,由机翼产生大部分升力。当旋翼重新倾转朝上后,V-22又将获得垂直着陆的能力,对于着陆场的要求大大减少。V-22的出现使得美国海军陆战队获得了装载大量兵员物资从两栖登陆舰上起飞,长途奔袭,降落前线起降场快速投入作战的能力。
固定翼多旋翼复合飞行器是一种新型的垂直起降飞行器,采用多旋翼与固定翼飞行平台相结合的方式得到简单而有效的垂直起降解决方案。复合多旋翼相对其他无人飞行器具有多方面的优势,相较于其他垂直起降飞行器,具有技术实现性好、成本较低等优点。经过几年发展,复合多旋翼技术已经实现突破性发展,小型复合多旋翼即将投放市场。固定翼多旋翼复合飞行器是最近几年才发展起来的新型航空器,实践证明其技术可实现性好,远高于倾转旋翼机、涵道升力风扇(倾转)、尾座式等其他垂直起降无人机。
采用复合多旋翼技术可以实现垂直起降与固定翼模式平飞的结合。复合多旋翼飞行器经过短短几年发展,完成了技术验证,相关技术正在发展成熟。复合多旋翼已经进入实用化产品研制发展阶段,其中一些产品即将投放市场。作为一种新型高效低成本垂直起降无人机,复合多旋翼有着独特的性能优势,能够充分满足用户的各种需求,预期市场巨大,未来发展前景广阔。美国Latitude Engineering在复合多旋翼飞行器技术研究及产品方面走在世界前列。Latitude 公司成功研制出多款复合多旋翼飞行器,并开发多旋翼套件,与Arcturns UAV Sensintel、Dronetech UAV等无人机企业合作,使用多旋翼套件改装现有的固定翼无人机,成功开发多款复合多旋翼飞行器。除了专业化无人机公司外,国外一些航空爱好者和小公司也成功试制出小型复合多旋翼飞行器。国内的上海昊翔电能运动公司已经成功申报“固定翼与多旋翼组合的复合飞行器”专利。成都纵横自动化有限公司于2015年也推出了他们的第一款复合翼飞行器CW20“大鹏”,成为国内民用无人机行业第一款投入实际应用的复合多旋翼飞行器。
复合多旋翼技术将多旋翼动力系统和平飞推进系统分开,在起降阶段使用多旋翼动力系统,起飞后平飞推进系统启动,随着机翼升力逐渐提升,多旋翼动力逐渐减弱,直到关闭。这种设计相对简单,因此受到大量小型民用企业的欢迎,然而多旋翼动力系统和平飞动力系统存在冗余,会造成大量废重,减少续航时间与航程。
3 便携式双模无人机概念设计
3.1 设计需求
本文拟设计一种较为可行的便携式双模飞行无人机方案,该无人机应可在飞行中自由切换固定翼模式与旋翼模式,在固定翼模式飞行时,具有较好的低速稳定性和操纵性,旋翼飞行模式可以垂直起降以及悬停。同时,作为一型单兵便携式侦察无人机,要求其折叠后具有较小的包络,并尽可能减重以提升有效载荷、续航时间以及降低携带负担。
3.2 任务规划
由于双模无人机具有多旋翼与固定翼两种飞行方式,因此既可手掷起飞,也可在地面垂直起飞。在空域较为开阔的地区,可采用手掷起飞增加续航时间,而如果在地形和空域较为复杂的地区,可采用垂直起飞以便对飞行进行精确控制。
在飞行过程中,针对不同的任务需求,无人机可在多旋翼模式与固定翼模式之间切换,即可在目标上空盘旋,也可进行悬停。
任务结束返航后,可切换至多旋翼模式降落,对于着陆场要求较低。整个任务如图4所示。
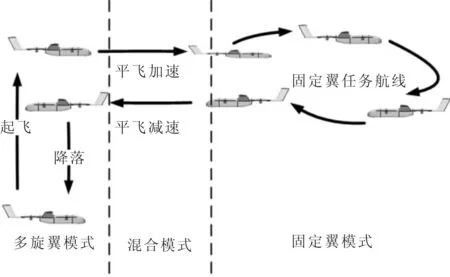
图4 多旋翼模式与固定翼模式之间的转换
3.3 气动布局
本文提出一种复合升力布局,将固定翼和多旋翼布局的优势相结合。起飞降落及空中悬停作业时可采用多旋翼提供升力,转换平飞模态时两个前置旋翼向前倾转,将垂直升力转换为水平推力,由机翼提供升力。
基本布局为大展弦比梯形后掠机翼,双尾撑,两片相连的倾斜尾翼同时起到垂尾和平尾的作用,简化整机结构,减少单兵携带中垂尾、平尾翼尖刮蹭的可能。
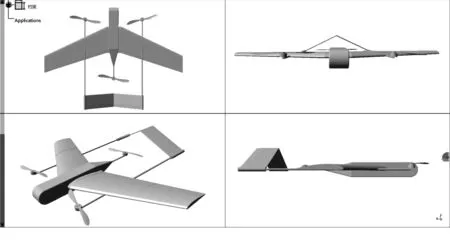
图5 双模无人机气动布局方案
机翼后掠一方面可以减少对于两个前置螺旋桨在旋翼飞行模式时桨气流的阻挡,另一方面可以提升整机的方向稳定性和横侧稳定性,减少倾斜尾翼设计造成的等效垂直尾翼面积减少的影响。两个可伸缩尾撑杆向前伸出机翼,安装两套可倾转电机和螺旋桨。另一套电机和螺旋桨安装在机身后部。整机设计如图5所示。
3.4 动力系统
为了尽可能减轻重量,该机在旋翼飞行状态采用三旋翼动力系统,为了保持桨叶总扭矩为零,在本设计中,两个前置电机转向相反,尾部电机绕机身纵轴偏转一个角度,在产生升力的同时,产生一个侧向力,以抵消返扭,如图6所示[5-7]。
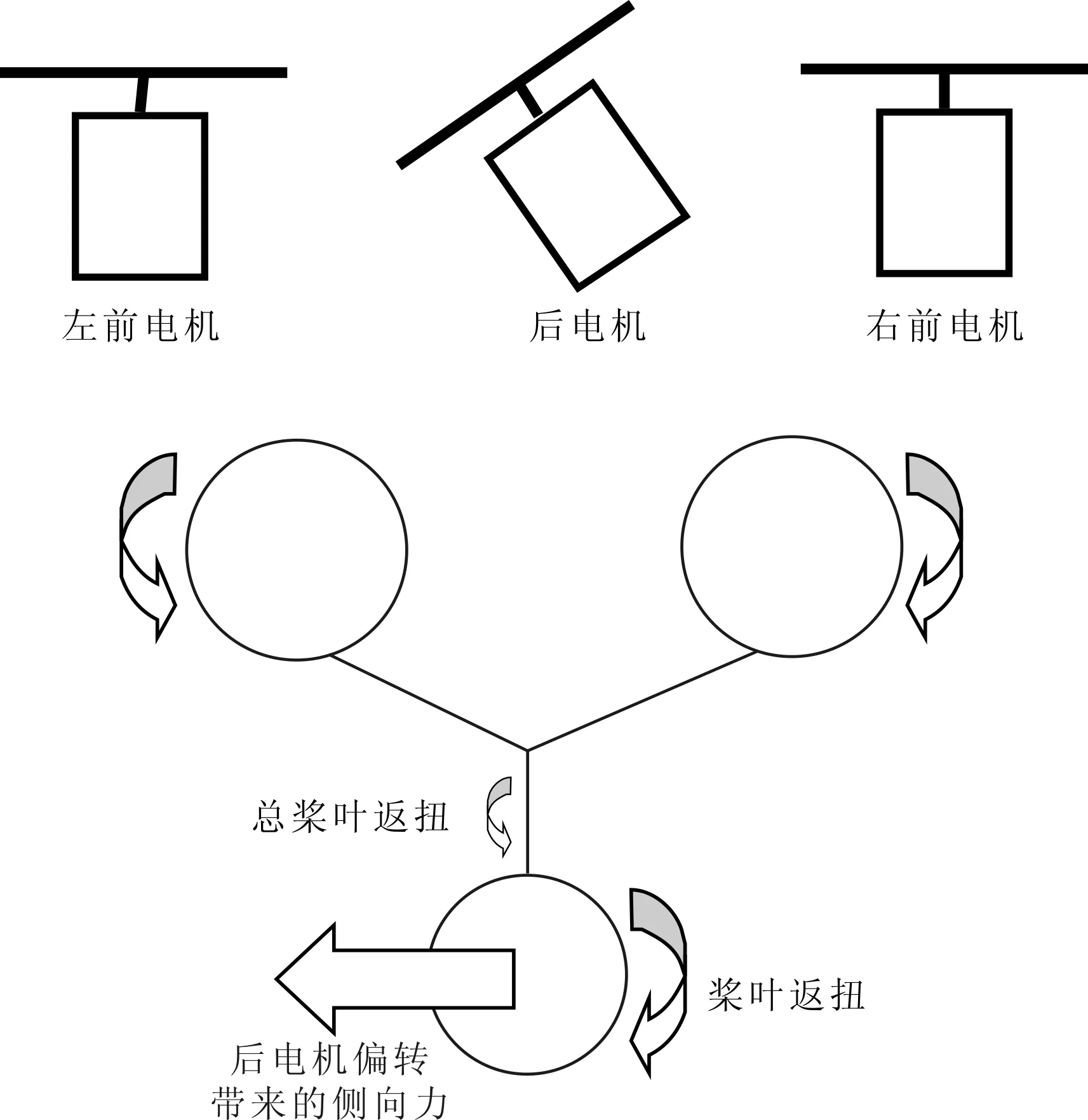
图6 三旋翼系统抵消反扭方式
同时,为了使旋翼模式与固定翼模式共用一套动力系统,两个前电机与螺旋桨可在倾转机构的推动下向前倾转,实现从旋翼模式向固定翼模式的转换。转换后两个前电机旋转方向相反,后电机停转,消除了桨叶反扭对于平飞的影响。旋翼倾转机构如图7所示,由舵机驱动的摇臂使得机构绕主轴转动90度,并且两个状态均接近摇臂死点,可减少舵机在不倾转时的受力。

图7 旋翼倾转机构
3.5 系统折叠设计
为了便于单兵携带,需要对无人机进行折叠设计,减少无人机折叠后的纵向、横向长度,本文对无人机的折叠设计包括机翼的折叠与电机撑杆、尾撑杆的折叠。
本文中机翼可以通过在机翼上表面的铰链向上折起,减少运输携带过程中的翼展。机翼展开后,通过在机翼梁上设置的闭锁机构实现锁定进行飞行。折叠机翼设计在微型无人机中大量采用,技术难度不高,在此不再赘述。
无人机左右两侧前后贯通的电机/尾翼撑杆为可伸缩模式,机翼前的撑杆在储存/运输状态下可缩回机翼中,尾撑杆也可缩回机翼中(见图8),倾斜尾翼遮蔽后电机,减少机身长度。储存/运输状态下的便携式无人机如图9所示。
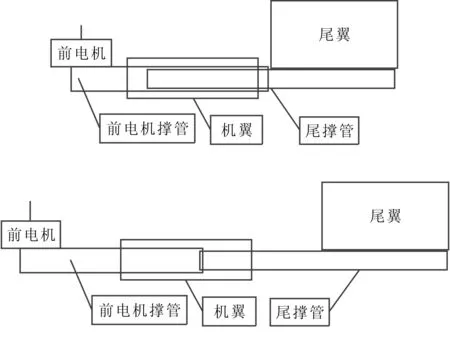
图8 电机/尾翼撑管折叠示意图

图9 无人机折叠后效果图
4 结语
本文设计了一款可折叠的双模无人机,将固定翼无人机航程远、速度快的特点与多旋翼无人机可垂直起降,悬停的特点结合在一起,不同于常见的复合升力无人机。本文采用了倾转旋翼技术实现同一套动力系统对于多旋翼模式与固定翼模式的驱动,大大减少了飞机的结构重量。折叠设计使得整个无人机小巧便于单兵携带,可以在班一级战场侦察、警用监控、灾情监控和侦察等方面起到很大作用。但是本设计尚处在方案与概念设计阶段,在倾转机构、折叠机构的具体设计,倾转过程的飞行力学性能等方面仍有大量工作需要完成。
[1] 蔡. 美国海军订购372架RQ-16A无人驾驶直升机[J].直升机技术,2008(3):24.
[2] 彭小龙,宗刚,郭翔,等.微型无人机将改变“游戏规则”——美军微型无人机的发展[J].飞航导弹,2012(10):31-36.
[3] 刘广斌,罗卫兵,严斌亨.美军微小型无人机及关键技术探析[J].飞航导弹,2016(5):43-47.
[4] 庄林,张伟.美国陆军无人系统力量建设举要[J].国防科技,2015,36(2):82-88.
[5] 陈琦,江涛,蔚建斌,等.倾转三旋翼无人机关键技术与发展趋势[J].飞航导弹,2016(7):34-37.
[6] 崔金峰.三旋翼航模飞行姿态的智能控制研究[D].长春:长春理工大学,2013.
[7] 张飞,路平,江涛,等.倾转三旋翼无人机纵向推力矢量控制研究[J].飞行力学,2017(9):1-5.
