基于等效能耗的汽车行驶工况重构算法研究
2018-02-03龚春忠张洪雷
龚春忠 张洪雷
摘 要:汽车行驶工况对汽车的动力性经济性参数的设计开发有重要的参考意义。不同工况对电动汽车的续驶里程有非常显著的影响。本文通过研究汽车实际道路行驶工况,依据等效能耗的原则,通过工况重构算法快速精确地生成等效工况。该技术可应用于智能网联汽车中的个性化动力系统设计与个性化续驶里程预测功能中。
关键词:汽车行驶工况;等效能耗;工况重构算法
中图分类号:U461.1 文献标识码:J 文章编号:1005-2550(2018)06-0031-04
Research on reconstruction algorithm of vehicle driving condition based on equivalent energy consumption
GONG Chun-zhong, ZHANG Hong-lei
( Zhejiang Hozon New Energy Automobile Co., Ltd. trial
production test department, Jiaxing, Zhejiang 314000, China )
Abstract: The driving condition of the car has important reference significance for the design and development of the dynamic economic parameters of the automobile. Different working conditions have a very significant impact on the driving mileage of electric vehicles. In this paper, by studying the actual driving conditions of the vehicle, the equivalent energy consumption and principle are used to generate the equivalent working condition quickly and accurately through the working condition reconstruction algorithm. This technique can be applied to the intelligent network in automobile power system design personalized and personalized mileage prediction function.
汽車动力系统设计的过程中,需要给定用户的典型工况,作为设计的输入[1]。但是,世界各地区在选择何种工况作为标准时有一定的差异。我国采用与欧标相同的NEDC工况[2]。而动力系统的匹配效率、汽车能耗的设计,均与工况有关。如果工况选择不合理,将会造成匹配工作与实际情况存在较大偏差。在互联网与大数据时代,客户驾驶工况的提取数据量将变得巨大而全面,如何使用一种有效的算法将实际行驶路况数据重构成典型工况,是一个具有深刻意义的研究课题。
为了研究不同城市的工况特点,文献[3]使用极大似然估计法与马尔可夫链相结合的方法构建工况,文献[4]采用离散小波变换的多分辨信号分解算法对汽车行驶工况进行构建,文献[5]采用主成分分析法对运动学片段进行降维处理,接着利用K 均值聚类技术对其进行分类,是一种典型的统计构建道路工况的方法。
随着智能网联汽车技术的发展,收集与统计大量汽车的实际行驶工况变为简单易行的工作[6],基于大数据的分析可以快速逆向生成工况[7]。本文通过汽车路试采集路况数据,使用等效能耗的方法,构建与实际工况近似的等效工况。
1 汽车实路工况获取
汽车实路工况是指在实际道路上行驶的t-v曲线。通常,不同的城市,不同的路段,甚至不同的驾驶员,都有各自独特的实路工况。汽车制造商获取实路工况的方法通常有试验法和用户数据采集方法。随着智能网联汽车技术的发展,结合大数据与人工智能技术,汽车制造商将以试验为主要途径的工况逐渐转向为从用户处获取信息为主要途径。
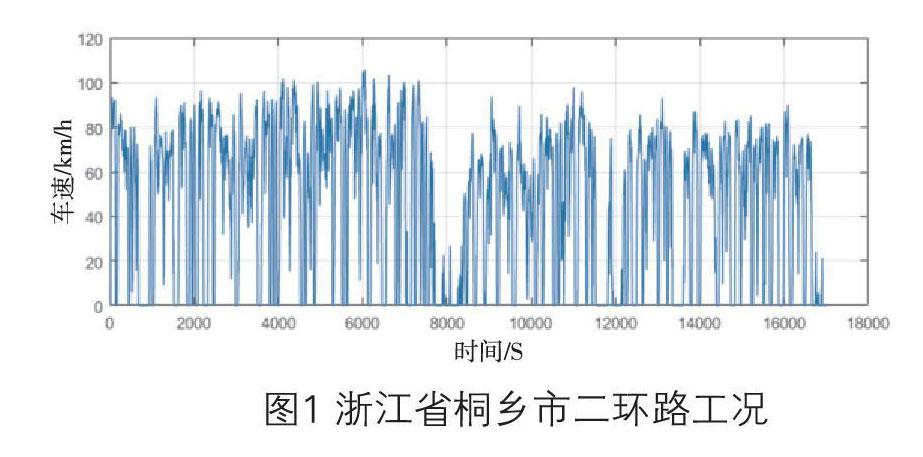
本文主要研究的工况构建算法,在应用上与大数据技术一起完成,但开发与测试时,数据的获取是通过试验获得。浙江合众新能源汽车有限公司EP10车型,在浙江省桐乡市二环路做耐久试验的过程中,使用V-Box采集了t-v数据。如图1所示:
2 概率密度普与工况构建
不同的行驶工况对应汽车不同的能量消耗率,电动汽车通常用百公里耗电量来描述。电动汽车的续驶里程及能量消耗率是制约电动汽车发展最关键的参数。本文提出的汽车工况重构法,是以汽车行驶实际工况为原始数据,首先,根据v-a概率密度谱,获取汽车实际工况下在不同的车速、加速度性能下的工况分布情况;其次,将工况密度网格化,近似成匀加速、匀减速、匀速等方格区域;接着,使用匀加速、匀减速原理,获取汽车在车速不为0,加速度不为0的情况下各工况的加减速时间矩阵;然后,将概率密度矩阵与减速时间矩阵相除,通过修整与补正原理,获取加减速段的段数;最后,通过修整后的段数矩阵,逆向构建出适合于试验使用的NEDC工况循环。
2.1 v-a概率密度谱
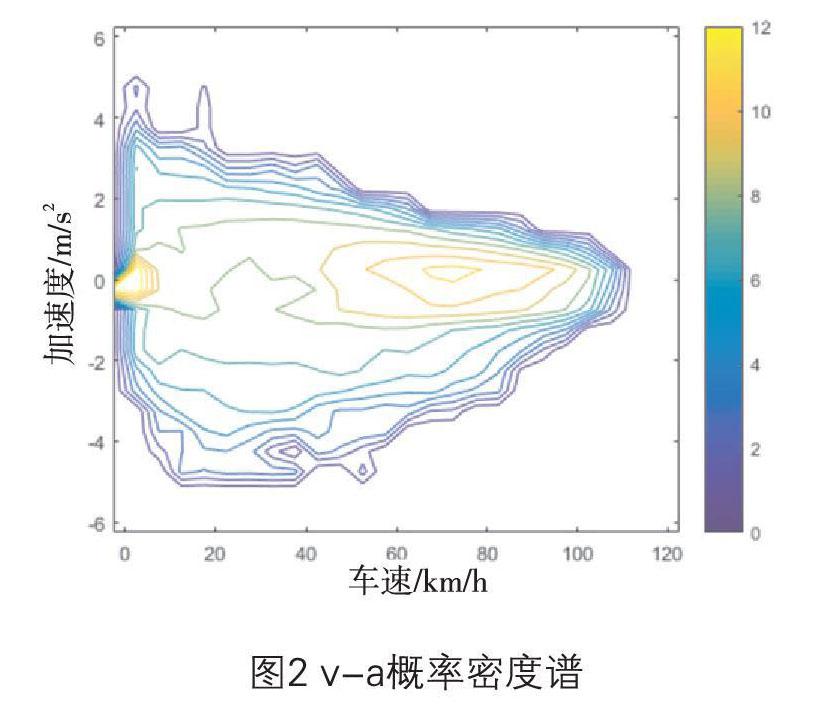
如果车上有加速度传感器,则直接读取加速度传感器的值,可以获得更精确结果。如果没有加速度传感器,则将采集到的t-v曲线做滤波处理,滤波处理后再通过数值微分获得加速度a。(v,a)点对的分布,将直接影响电机的工作区域。因此,将该采样中的(v,a)点对做统计分析,得到如图2所示的v-a概率密度谱。
图中 ,将(v-a)分割为一个矩阵,加速度范围为-6.5m/s2~6.5m/s2,速度范围为0~125km/h。速度统计分组间隔10km/h,加速度统计分组间隔1m/s2,获得矩阵Z。
2.2 v-a概率密度谱
矩阵Z中的各网格v-a区间数量即为汽车在该区域的工作时长。如果将汽车的工作状态从网格的左端匀加速运动到右端,则计算出经过一次该区域的时间。其中,加速度为0时,其通过时间不
使用该方法计算。
对于匀速段间隔时间均为10km/h,则该时间仅与加速度相关。各加速度对应的通过时间如表1所示:
2.3 v-a段数矩阵构建
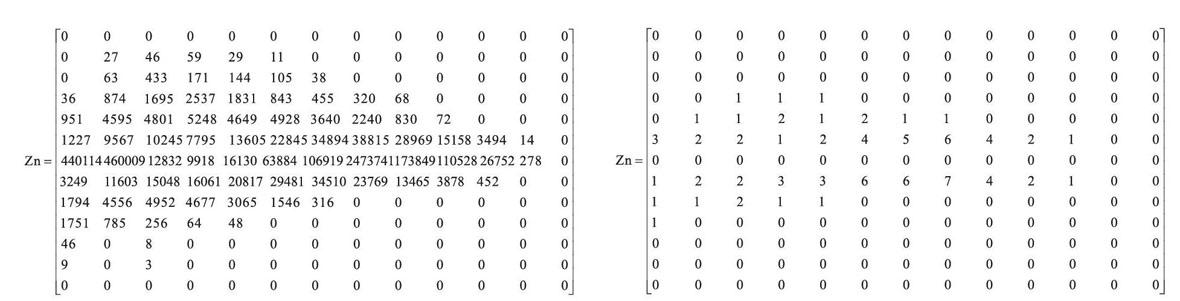
当v≠0且a≠0时,汽车通过某段区间的总时间除以通过一次该区段所需要的时间,即可获得该区域段数。当v=0或a=0时,不可通过分段法获得。计算的段数通过四舍五入,可以获得段数矩阵Zn。
通过矩阵Zn构建工况,需要Zn矩阵具备如下特点:在每个车速下,均满足a>0时的段数与a<0时的段数相等。这样才能构建一起一落的车辆状态。而因为Zn是通过四舍五入获取的整数值,因此存在不对称的可能。为了令其对称,需要将其人为补对称。通过分布特点可知,人为靠近a=0处的加速度密度最高,最易被忽略归入匀速段,因此补线段的原则是,在靠近a=0处补齐。配平后对称的矩阵如下。
2.4 基于v-a概率密度矩陣的t-v曲线重构
一个标准的NEDC工况循环是20min,一个循环是10.9km,对于续驶能力限值达到150km的汽车来说,执行13个完整循环和一个不完整循环,就
可以通过测试。而最后一个循环是否能顺利通过最高车速的点上,工程师想尽办法在这个问题点上优化设计汽车,因为其影响续驶能力的7.7%。但如果每个循环重构选择时间15min,里程为8.2km,则续驶里程为150km的汽车,将执行18个完整循环和1个不完整循环,此时影响续驶里程的情况为5.6%,较之前提高27.2%.
将矩阵Zn重新构造后,得到如图3所示的t-v曲线。
3 等效分析
重构的工况与原来的工况对比,是基于概率密度趋于近似而定的。理论上来说,等效工况与重构工况有很多参数是相等的。例如:全程平均车速、停车时间占比等。但最直接描述等效工况能耗与实测工况的接近程度,是其能耗指标,这将作为重构工况质量判定最重要的指标。
3.1 重构工况与实测工况v-a轨迹对比
实测工况的t-v曲线可以构建v-a轨迹图,重构工况的轨迹应接近于实测轨迹,如图4所示:
3.2 重构工况与实测工况能耗对比
根据GB/T18352-2013,汽车的道路阻力载荷可以使用查表法。这种方法规定了汽车在转毂上测试NEDC工况的轮边能耗。重构工况与实测工况相比,并与实际的NEDC工况相比,其能耗对比数据如表2所示:
表2可知,重构工况与实测工况相比,重构工况能耗偏高3~4%;实测工况与标准NEDC工况相比,标准NEDC工况能耗偏低13%~15%。
因此,选用重构工况比选用标准NEDC工况更接近。进一步优化重构工况,令其能耗接近实测工况,是下一步的工作目标。
4 结 论
目前,中国纯电动乘用车采用NEDC综合工况作为工信部公布的各电动汽车车型的续驶里程参考工况。其意义是:选定一种公认的方法让所有电动汽车企业可以横向比较。但是随着地域,驾驶员路线,甚至驾驶员习惯的差异,该工况与大多数精细化需求有较大的脱节。而迎合补贴政策,开发设计阶段并没有依据更详细的分析参考。选择一种更为合理的工况工作迫在眉睫。
统一一种典型中国工况标准,并不是最好的选择。汽车供应商在应对动力系统能耗最优匹配方案的时候,总会面临一个选择:更好地符合标准工况还是更好地适应客户实际工况。我建议使用双标准制度,如同汽车道路阻力,可以选择标准规定的当量惯量及阻力,亦可选择汽车制造商自己滑行实测。工况可以选择国家标准工况,亦可选择汽车制造商通过大数据收集而等效能耗法重构的工况。
等效能耗工况重构算法的优点有:1、以等效能耗为目标,针对新能源汽车目的性强;2、使用工况重构,周期选择更为合理;3、借助互联网大数据技术,可逐步实现为客户定制化最优能耗匹配方案;4、所重构的工况更利于试验开展。该方法局限于当前技术依然有如下缺点:1、该构建法是近似等效法,与实际情况差距有待验证;2、没有考虑换挡规律,对换挡工况影响有待做进一步分析优化,但对单速比情况无此影响;3、没有考虑坡度谱,实测中获取道路坡度技术尚不成熟。这将是未来改进的方向。
参考文献:
[1]阮廷勇,张开斌. 北京工况、重庆工况及欧洲工况特征参数比较与分析[J].重庆工学院学报(自然科学版),2007,(10):18-22.
[2]GB 18352.5-2013 轻型汽车污染物排放限值及测量方法(中国第五阶段).
[3]张锐.城市道路汽车行驶工况的构建与研究[D].合肥工业大学,2009.
[4]姜平,石琴,陈无畏,黄志鹏.基于小波分析的城市道路行驶工况构建的研究[J].汽车工程,2011,33(01):70-73+51.
[5]石琴,郑与波,姜平.基于运动学片段的城市道路行驶工况的研究[J].汽车工程,2011,33(03):256-261.
[6]刘天洋,余卓平,熊璐,张培志.智能网联汽车试验场发展现状与建设建议[J].汽车技术,2017,(01):7-11+32.
[7]杨静,李文平,张健沛.大数据典型相关分析的云模型方法[J].通信学报,2013,34(10):121-134.
