基于慧鱼技术的小型侦察机器人方案设计
2018-01-29邓成军
邓成军, 何 俊, 李 锋
(四川大学 制造科学与工程学院,成都 610065)
0 引 言
随着社会经济的迅猛发展以及大型石油化工企业、隧道、地铁等建设的不断增多,化学危险品泄漏以及燃烧、爆炸等事故隐患的增加,事故概率提高[1]。一旦发生危险灾害事故,经常会遇到情况不明、救援人员面对高温、辐射、有毒和浓烟等危险环境时,根本无法接近事故现场。基于以上综合考虑,本文设计一款小型侦察机器人,代替救援人员进入情况不明或难以进入的事故场合去查明现场情况、则可大大减小人员伤亡,提高保障能力和工作效率。
慧鱼创意组合模型是技术含量很高的工程技术类智趣拼装模型[2-3]。它由机械构件、电气构件、传感器、气动构件、电脑控制器及软件所组成的系统等不同模块组成[4];以机械传动为核心,融传感器技术、计算机技术、自动控制技术、机器人技术于一体的教学及仿真模型[5]。对于学生直观、快速地掌握各知识点,具有良好的促进作用,同时能激发学生的创新思维和创新能力[6-8]。本文设计并制作拼装了小型侦察机器人,主要对侦察机器人的机械系统和控制系统进行了设计。
1 机械系统设计方案
侦察机器人一般要求具有体积小、质量轻、机动性好、转向灵活,可以方便携带进入侦察地点,并且能够在短时间内准备就绪并投入工作[9]。
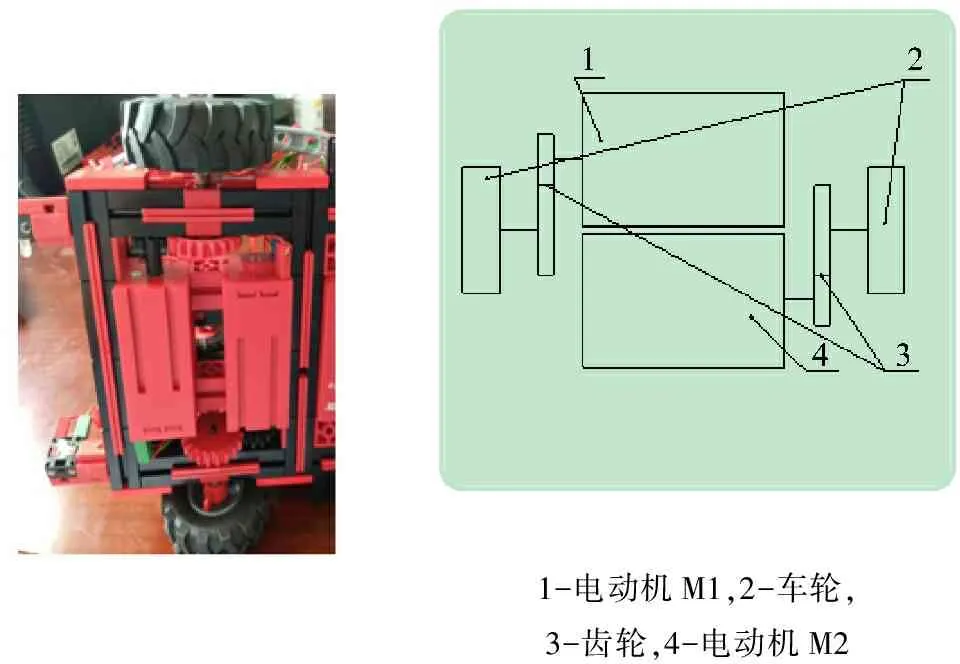
根据以上功能目标,小型侦察机器人的机械系统主要有行走动力及轮式移动机构、摄像头的角度升降机构两大部分组成,实物模型如图1所示。

图1 小型侦察机器人模型
1.1 行走动力及轮式移动机构
侦察车的常规行走动力由两台伺服电动机来完成,再通过齿轮传动来增大其扭矩,其传动结构示意图如图2所示,两台电动机可以为车辆的行驶提供足够的动力,保证行驶速度,并且可以通过两台电动机的互相配合达到转向的目的[10]。车辆的驱动前轮采用越野橡胶轮胎,保证车轮和路面有良好的附着性,以提高侦察车的牵引力、制动性和通过性。后轮采用两个万向车轮,以保证车辆在两个前轮的互相配合下,能够实现转弯,以及原地掉头等功能。
1-电动机M1,2-车轮,3-齿轮,4-电动机M2
图2 行走动力及轮式移动机构示意图
1.2 摄像头的角度升降机构
在侦察机器人前方和摄像头支臂之间安装了蜗轮蜗杆机构,主要用于传递空间交错两轴之间的运动和动力,交错角一般为90°,在彼此既不平行又不相交的情况下,通常蜗杆是主动件,蜗轮是被动件。使其相互配合可以实现支臂的角度升降调整。在本设计中,小型侦察车的摄像头角度升降由电动机进行驱动,并且通过多级齿轮减速来驱动蜗杆,如图3所示,蜗轮与摄像头的支臂相联接,该机构可以实现摄像头与车体本身90°范围内的任意角度升降调整,以此来扩大摄像头的视觉范围。

1-蜗杆,2-蜗轮,3-齿轮箱,4-电动机M3
图3 摄像头角度升降机构示意图
2 控制系统设计方案
侦察机器人一般工作在未知的环境里[11],它要求侦察机器人具有局部的环境感知、自动检障和避障、局部自主移动导航等能力,能够自主完成操作员规划好的任务,而复杂环境分析、任务规划、路径选择等工作由操作指挥人员来完成。因此,结合有关机器人控制结构体系[12-14],采用了人机交互方式的半自动进行控制。设计了手动遥控远程控制和自主侦察移动控制两种模式,在本设计中,首先通过绘制出侦察机器人的控制方案流程图,结合流程图利用慧鱼ROBO PRO软件进行程序和人机交互界面的设计。
2.1 控制流程方案设计
2.1.1手动遥控远程控制功能
为了使机器人能够在人不能及的环境中进行侦察任务,必须采用遥控操作,实现机器人前进、后退、转弯和越障以及摄像头装置运动等动作[15],操作员通过摄像头实时采集的现场图像来实现视觉导航并观察前方情形,其控制功能流程图4所示。按照机器人的控制功能方式通过慧鱼ROBO PRO软件设计出上位机的人机操作控制界面,如图5所示。
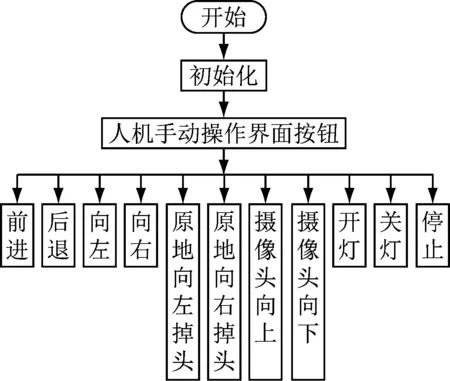
图4 手动操作功能流程图
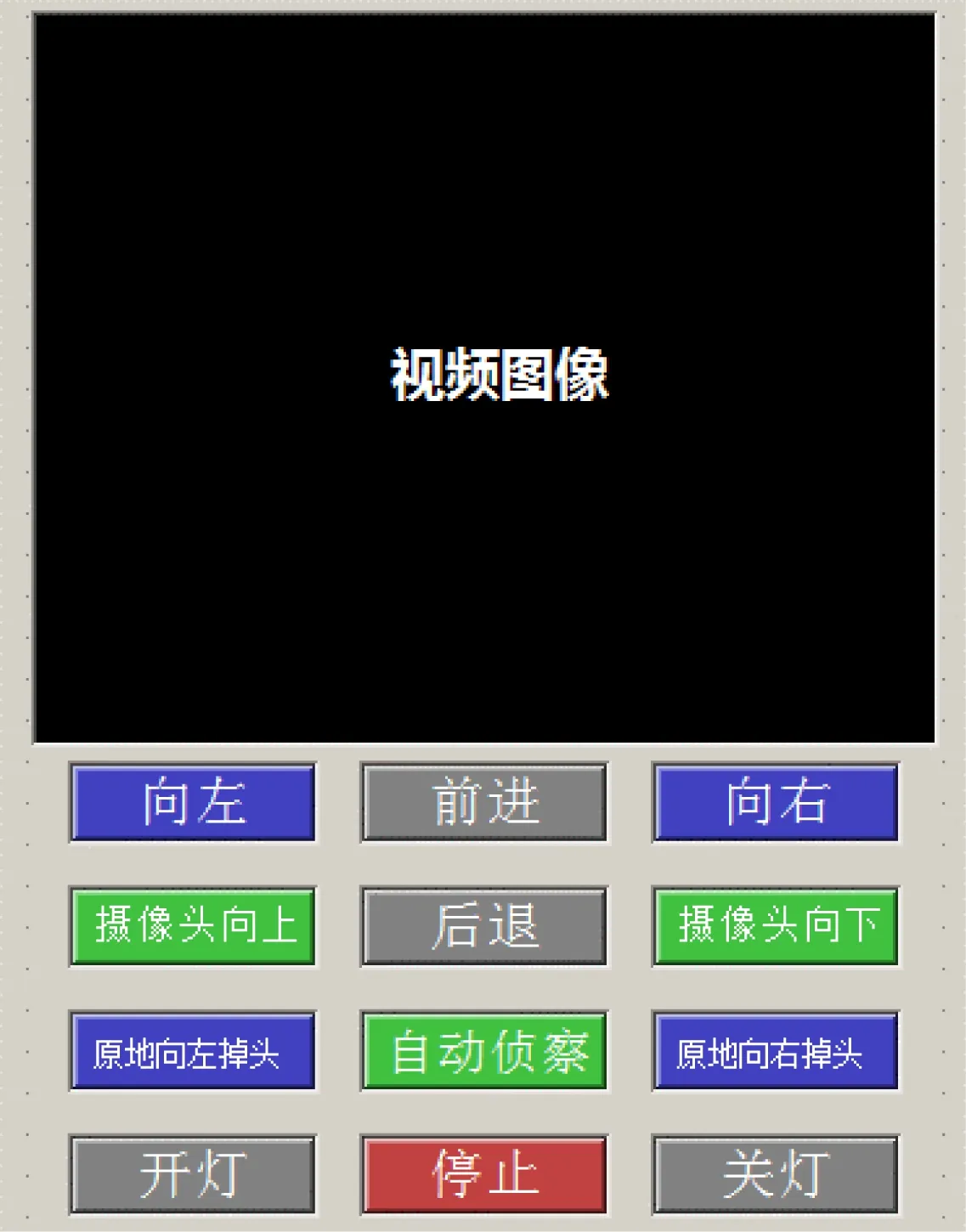
图5 人机远程遥控操作界面及视频图像
2.1.2无线遥控远程控制功能
为了实现远程控制功能,就要求侦察机器人的控制命令的发出和接收以及视频图像的传输必须使用无线通信的方式。本文中,无线通信方式是通过下位机ROBOTICS TXT控制器自身内置的WiFi模块发出的信号与上位机的人机操作界面进行无线通信,来实现视频图像传输和控制命令的发送和接收。
2.1.3自主侦察控制功能
要实现自主侦察功能,这就要求机器人能够对周围环境的感知来检测判断障碍,从而自动避开障碍。通过自动轨迹追踪,实现沿着操作指挥人员规划的路径进行侦察。本文中,通过利用光敏传感器、轨迹传感器、超声波传感器,热敏传感器、摄像头等来实现机器人对周围环境的感知,采用局部路径规划方法,让移动机器人通过传感器对目标位置进行定位,同时通过传感器对行走路线不断的修正,最后达到目标[16]。此类方法对未知环境表现出较强的适应能力,已有针对未知环境中路径规划问题的研究也多集中于此类方法[17],其控制功能流程如图6所示。
2.2 控制程序设计
结合侦察机器人的功能控制流程图,使用慧鱼ROBO PRO软件进行程序的编制,其自主侦察及手动遥控侦察控制程序分别如图7、图8所示。

图6 自主侦察控制功能流程图
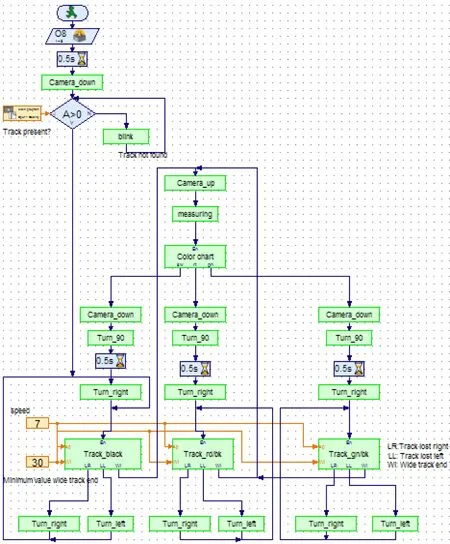
图7 自主侦察移动控制程序
2.3 各分支机构控制方案
侦察机器人的每个动作都是由程序进行控制,各元件的名称与对应的功能如表1所示。

图8 手动遥控远程控制程序

元件实现功能元件实现功能M1驱动左边车轮电动机I2摄像头角度上限位M2驱动右边车轮电动机I3轨迹追踪功能M3驱动摄像头升降电动机USB⁃A连接摄像头实时监控I1摄像头角度下限位I4检测环境的光敏度I5检测障碍物距离O8光线不足时,用于照明
(1) 前进、后退功能。要求机器人前进时,操作人员可以通过人机交互界面按下“前进”按钮,则M1、M2同步正转,机器人直线前进。当需要后退时,按下“后退”按钮,则M1、M2反转,机器人直线后退。由于两伺服电动机通过ROBOTICS TXT控制器采用同步控制,能够保证具有相同的速度。
(2) 左转、右转功能。要求机器人左转时,操作人员可以通过人机交互界面按下“向左”按钮,则M2正转,M1保持停止,机器人向左转弯。当需要右转时,按下“向右”按钮,则M1正转,M2保持停止,机器人向右转弯。
(3) 摄像头角度升降调整功能。要求摄像头角度上升时,按下“摄像头向上”按钮,则M3电动机正转,摄像头缓慢向上升起,直到最佳观察位置,松开按钮,M3电动机停止。要求摄像头角度下降则按下“摄像头向下”按钮,则M3电动机反转,摄像头缓慢下降,直到最佳观察位置,松开按钮,M3电动机停止。本设计中,摄像头角度调整的范围为0°~90°。为了防止超程,设置了I1和I2两个行程开关。
(4) 侦察机器人原地掉头功能。本设计中,侦察机器人可以实现原地向左和原地向右两种方式掉头,同时也帮助摄像头实现360°侦察功能。原地向左掉头时,电动机M1反转,电动机M2正转。原地向右掉头时,电动机M1正转,电动机M2反转。
(5) 实时视频监控功能。该功能采用USB-A摄像头实时采集现场视频图像,通过ROBOTICS TXT控制器的WiFi信号传输视频图像,实时显示在人机操作界面上,以帮助操作指挥人员实时了解现场情况,实现手动遥控操作的视觉导航功能,如图9所示。

图9 人机操作界面视频图像显示
(6) 避障功能。侦察机器人根据自身携带的超声波传感器I5来检测周围的障碍物以及距离,从而自动避开障碍物,主要应用在自主侦察模式。
(7) 自动照明功能。侦察机器人利用自身携带的光敏传感器I4,自动检测周围环境的光线强弱,当光敏传感器检测到周围环境光线较暗时,自动打开照明灯,以辅助摄像头传回更加清晰的视频图像。光线明亮时,自动关闭照明灯,该功能主要应在自主侦察模式。
(8) 轨迹追踪功能。该功能主要应用在自主侦察模式,利用I3轨迹识别传感器的轨迹追踪功能,让侦察机器人沿着操作指挥员预先设定的轨迹路线进行侦察。
3 结 语
本设计完成的小型侦察机器人完成了对半自主侦察的整个过程的模拟,完成了侦察的整个流程。虽然该小型侦察机器人的结构设计基于慧鱼模型的特点,离具体的工程实际应用还有很大的差距,但是该模型的设计方案及理念对实际侦察机器人的设计制造具有一定的指导意义。
此外,通过慧鱼创意组合模型侦察机器人方案设计,使学生完成了从理论到具体实践的跨越,弥补了在实践环节中的一些不足,同时也培养了学生的创新意识和和创新能力,提高了学生的动手能力。
[1] 张树生,裴文良,孙 宁,等.消防灭火侦察机器人的研制与应用[J].制造业自动化,2016,38(6):55-58.
[2] 万佑红.机器人教育与大学生创新能力培养的探索[J].电气电子教学学报,2005,27(4):6-8.
[3] 窦艳涛,黄豪杰,李 健,等.基于慧鱼技术的家用洗碗机方案设计[J].实验室研究与探索,2013,32(3):31-33.
[4] 方 琳,张远明.基于“慧鱼”模型实习课程的改革与启迪[J].电气电子教学学报,2014,36(2):79-81.
[5] 黎泽伦,黄友均.慧鱼机器人在机电创新实验教学中的应用研究与实践[J].考试周刊,2015,54:122.
[6] 杨孟杰,张应红,李雪梅,等.基于慧鱼模型的“卓越工程师”机械原理实验教学改革[J].教育观察,2016,5(21):103-104.
[7] 李公法,孔建益,蒋国璋,等.卓越工程师培养背景下的《机械原理》建设实践[J].长江大学学报(自然科学版),2013,34(10):85-88.
[8] 黄朝阳.“工程对象教学法”在机电创新实践教学中的应用研究—以慧鱼模型为载体[J].大学教育,2014(2):71-75.
[9] 唐鸿儒,宋爱国.危险环境侦察机器人的研究进展[J].机器人应用,2007(5):29-35.
[10] 窦艳涛,袁亚雷,蔡晓君,等.一种水陆两栖救灾车方案设计[J].实验室研究与探索,2012,31(6):22-24.
[11] 吴 琳,梁建宏.半自主侦察机器人的控制体系结构研究[J].机器人技术与应用,2007(6):34-38.
[12] BROOKS R A.A robust layered control system for a mobile robot[J].IEEJ of Robotics and Automation,1986,RA-2(1):14-23.
[13] FABRICE R N,RAJACC.Plan execution monitoring and control architeture for mobiler robots[J].IEEE Transactions on Robotics and Automation,1995,11(2):255-266.
[14] 唐鸿儒,宋爱国.半自主侦察机器人研究[J].制造业自动化,2005,27(12):30-35.
[15] 陈殿生,杨 喜,李 强.小型地面侦察机器人移动载体技术研究[J].机器人技术应用,2006(6):43-46.
[16] 徐 伟.未知环境下局部路径规划方法在慧鱼移动机器人开发中的应用探讨[J].实验技术与管理,2015,32(2):110-113.
[17] 刘 欢,王 健,李金凤,等.未知环境下机器人避障设计研究[J].机械设计与制造,2013(10):236-238.
