用于渔业资源调查评估的两种声学手段的比较
2018-01-27童剑锋张华臣
沈 蔚,陈 明,童剑锋,张 进,张华臣
(上海海洋大学 海洋科学学院,上海 201306)
目前,水声学的方法已经大量运用于渔业资源调查与评估之中,主要仪器有数字回声探测仪与双频识别声呐。与其它的渔业资源调查方法相比,渔业水声学方法具有探测范围广、调查效率高、对调查区域的生态环境无损害、数据连续、鱼群位置定位精准、鱼类密度和资源量评估精度高等优点。我国的渔业水声学是从20世纪80年代开始发展推广。1985年,SIMRAD EK500回声探测仪被应用于“北斗”号调查船[1-2]。王崇瑞等[3]于2011年5月使用BioSonics DT-X (210 kHz)型回声探测仪对青海湖的裸鲤资源量及其空间分布进行了探测评估,获得了青海湖裸鲤在青海湖全湖区的平均密度、总尾数和可捕捞资源量以及水平密度分布。孙明波等[4]利用BioSonics DT-X (208 kHz)型回声探测仪对太湖东部和北部湖区进行了走航式的调查,并结合地理信息系统对相关湖区的鱼类空间分布、大小组成和资源量进行了评估。DIDSON也应用于鱼群跟踪和计数,童剑锋等[5]利用DIDSON高效地对溯河洄游幼香鱼进行计数,并计算出向上游移动香鱼的数量。张进[6]于2011年运用DIDSON定量评估了滴水湖的渔业资源分布。众多研究结果表明,利用声学手段评估渔业资源是有效可靠的,但双频识别声呐与数字回声探测仪对渔业资源的评估也存在一定区别。同时使用双频识别声呐与数字回声探测仪对青草沙水库的渔业资源进行评估和比较,分析两种仪器进行渔业资源评估时的不同特点及优劣,确定两种仪器各自的适用情形,将来在不同的情境下更有针对性地从两种仪器中选择其一,可以降低成本和提高渔业资源评估的精度。
1 数字回声探测仪与双频识别声呐
1.1 数字回声探测仪(BioSonics DT-X)
回声探测仪检测水中目标时,通过目标物体的物理特性和水介质来实现。对于目标物体,回声探测仪换能器发射的声波在水中传播,当遇到目标物体时,由于物体的声阻抗率与水不同,该物体会对入射声波产生散射及反射作用,部分声波反射至换能器,被换能器接收,被称为回声信号(Echo Signal)[7]。根据声波从发射到接收的时间差,可以用来测量目标到换能器之间的距离,除此之外,利用回波信号的强度等物理特征,可以估计目标的数量和分布情况等。
常用的回声探测仪系统皆为探鱼仪、积分仪和目标强度测定仪于一体的集成式回声-积分系统[8],典型的分裂波束探鱼仪为美国的BioSonics系列的BioSonics DT-X。其换能器内置四个发射阵列,若在换能器的探测范围内有目标物,则四个发射阵列均能接收到目标物反射回来的声波,即可得目标物的位置、大小等信息。同时该系统自带的软件提供内置的单一目标分析算法来估算鱼类密度(Fish Density)和目标强度(target strength)[9-10]。它还提供回声积分(Echo integration)和底面追踪(Bottom tracking)的算法。内置的目标强度算法可使用单一目标分析的结果来量化回声积分,也可以使用其它的手动输入的数据来进行这一量化。BioSonics DT-X的主要技术参数如表1所示。

表1 BioSonics DT-X主要参数Tab.1 Main Parameters of BioSonics DT-X
1.2 双频识别声呐(DIDSON)
双频识别声呐 DIDSON (Dual-frequency Identification Sonar)是由美国华盛顿大学应用物理实验室研发,由Sound Metrics 公司制造,目的是为美国“空间与海上战争系统中心”提供技术支持[11-12]。DIDSON 主要有体积小、重量轻、方便携带及安装和成像清晰等优点。DIDSON是目前唯一应用声学透镜模块的声呐,其主体由电子舱及声透镜组成,主要通过声透镜的声波聚焦原理形成的狭窄波束,即利用声透镜对声波波束进行压缩,可以在没有光源且能见度较低的水中生成高清的声学图像。
双频识别声呐分为标准型(DIDSON-S)和远距型(DIDSON-LR)两个型号,本次调查所使用的仪器为标准型双频识别声呐。DIDSON有低频1.1 MHz和高频1.8 MHz两种工作频率,其工作视角在水平方向上为29°,在垂直方向上为14°,同时能够对1~40 m范围内的观测目标进行自动调焦,保证观测范围内目标图像的清晰度[13]。当DIDSON工作在1.8 MHz高频的时候,水平方向共发射96条波束,探测范围为1~10 m,可提供的图像分辨率较高,为0.3°;其工作在1.1 MHz低频的时候水平方向共发射48条波束,探测范围约为1-40 m,其图像分辨率约为0.6°。DIDSON 的主要技术参数如表2所示。
2 渔业资源声学调查背景及方法
2.1 研究区概况
青草沙水库位于长江口处南北港分流口的下游,西北方冲积沙洲青草沙上,分为若干水域,主要由长兴岛头部和北部外侧的中央沙、青草沙及北小泓、东北小泓等水域组成[14]。该水库总面积约67.2 km2,平均水深约为8 m,最深可达18 m。整个水库大致可分为3个区域:中部区域是全库的过渡性区域,水深处在全库中等水平,水流平缓,透明度也处在西部纳水的浅水区和东部取水的深水区之间;西部是纳水区,水深较浅、且水流急,水质浑浊;东部区域水深、澄清、透明度高。青草沙水库的地理位置如图1所示。

表2 DIDSON主要参数Tab.2 Main Parameters of DIDSON
青草沙水库在水库建成前后,对生物结构关注在逐步加强。胡忠军等[15]在2010年青草沙水库正式供水以前,对该水域进行鱼类群落结构特征分析。研究表明当时青草沙水库的鱼类相比长江口水域淡水鱼类的占比更高。在临近的长江口附近数个水域的调查显示,水库以外的长江口水域中,鱼类的优势种以近海鱼类的鲈形目最多,而在同时期进行的青草沙水库中只采集到了一种河口性的鲈形目鱼类。推测可能是因为水库的建成隔离了水库水域与长江口流域的水体交换,导致了青草沙水库中的河口性鱼类和近海鱼类逐渐减少,同时青草沙水库的淡水性鱼类越来越多。通过这几年的研究发现青草沙水库鱼类以淡水鲤科鱼类为主,虽然水库中有河口性鱼类,但种类和数目均很少。原因主要是青草沙水库处于长江口相对低盐度区,且其取水口设置在北港上游,在咸潮来临之前会关闭进水口,使水库保持较低的盐度,导致半咸水鱼类和近海鱼类的减少,除此之外水库内禁渔政策又给淡水鱼类生长提供了良好的栖息和保护场所[16]。

图1 青草沙水库地理位置示意图Fig.1 Location map of Qingcaosha Reservoir
2.2 声学调查方法
声学调查采用双频识别声呐DIDSON和BioSonics DT-X分裂波束探鱼仪同时进行。本次调查采用“之”字型调查航线,累计有效探测时间为7.52 h,调查航线总长为60.14 km,航行速度约为3~4节(如图2),探测效果较为理想。渔获物主要利用3层丝网和地笼网获取。
根据渔获物及水库捕捞队捕捞取样可获得青草沙水库中鱼类的体长、体重等相关信息,由此可求得水库鱼类平均体长与体重关系。采用幂函数回归的方法,即W=aLb,得到体重与体长的关系,由此得出水库中鱼类的平均体长与体重的关系式为:W=0.000 03L2.738 1,R2=0.942 8
数据采集过程中,两种仪器的换能器都固定于探测船右侧前舷离发动机约8 m处,避免发动机噪音对仪器的影响,入水深约 0.5 m,换能器垂直向下发射声波(如图3)。在探测过程中,根据水深的变化情况,手动调节DIDSON的频率。当水深小于10 m时,使用1.8 MHz的频率进行探测,以获得更高的分辨率;当水深大于10 m时,则将DIDSON的频率切换到1.1 MHz,以探测更长的距离。

图2 调查航线示意图Fig.2 Map of survey route
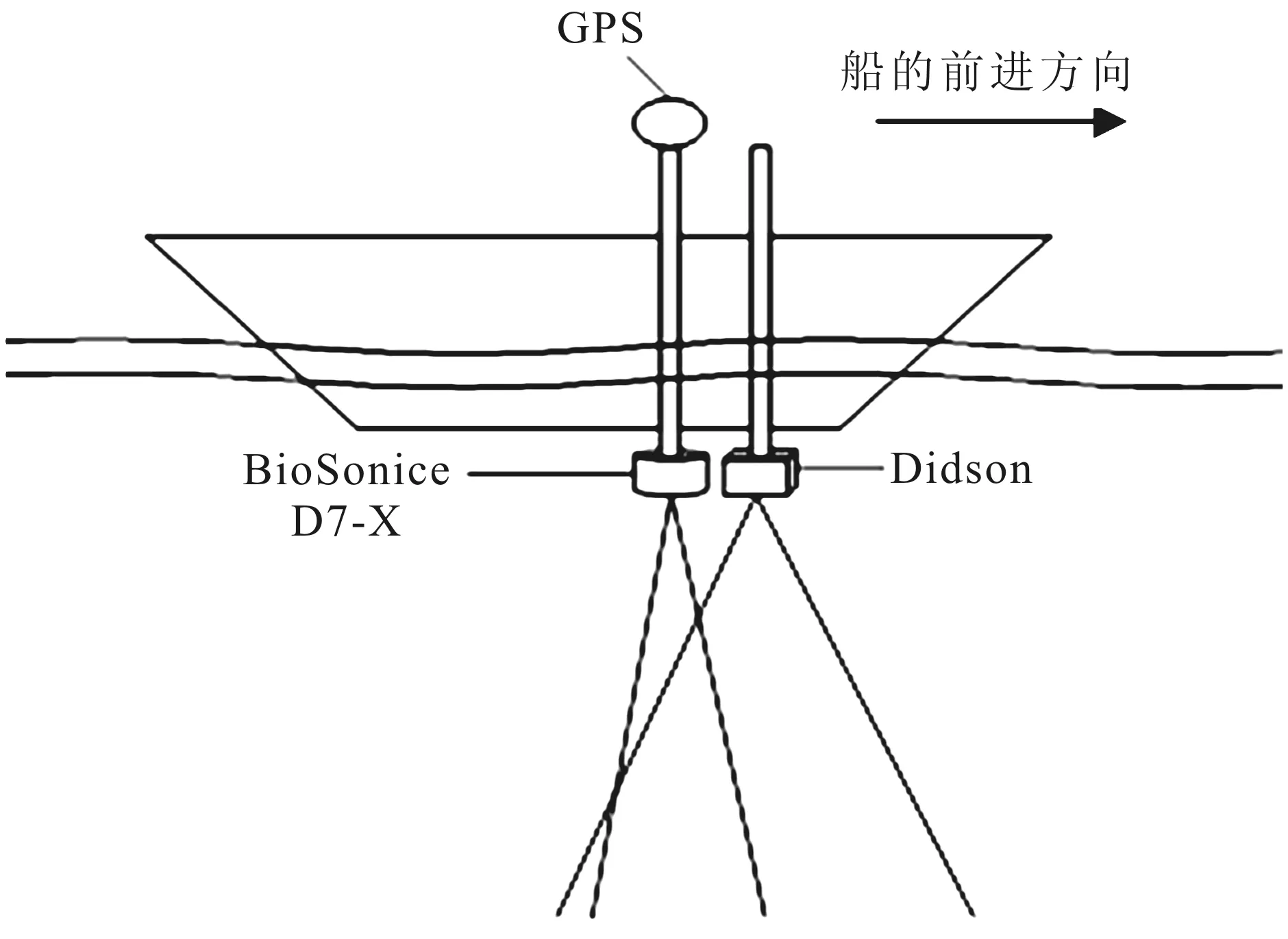
图3 仪器安装示意图Fig.3 Instrument installation diagram
在Echoview软件处理上,DIDSON是多波束系统,其映象中检测目标的与单波束系统不同,在Echoview中首先使用Multibeam target detection进行多波束目标检测,经筛选符合体长的目标后,使用Target conversion将多波束检测的目标转换为单目标数据的Echogram,进而可跟踪每个目标的深度,回波强度等信息,利用分裂波束的单目标跟踪检测方法导出所需要的信息。
本次调查对BioSonics DT-X数据以 300 Pings 为一个采样单元,共获得 452 个采样单元。采用Echoview 6 中的回声积分法计算每个采样单元鱼类密度,以此研究青草沙鱼群在湖中的分布状况。再根据各个采样单元密度求整个水库的平均密度,结合青草沙水库的水域面积估算青草沙鱼类数量。调查水域上海市青草沙水库的总面积约为67.2 km2,除去水库中心岛屿面积,其水域面积约为40 km2。青草沙水库鱼类的平均密度为 0.27 ind./m2;根据Love的鱼类体长与目标强度的经验公式以及渔获物的体长与体重的关系估算青草沙水库鱼类的平均体重约为0.56 kg。依据以上数据计算BioSonics DT-X测得的鱼类数量约为1 079万尾,总的资源量约为604.24万kg。

图4 DIDSON探测效果图Fig.4 Detection diagram of DIDSON
对于DIDSON数据,本次青草沙水库渔业资源总量可通过平均密度法来估算。分为两步进行,首先根据探测得到的统计结果来估算水库内鱼类总的数量。其次,根据捕捞队捕获的鱼类样本来获得水库内鱼类平均体长与体重的关系式,从而求得水库内鱼类平均体重。水库内鱼类总的数量乘以鱼类的平均体重即可得水库内鱼总的资源量。根据DIDSON统计结果来看,本次航线内鱼类的平均密度约为0.23 ind./m2,水库鱼类总数约为936万,总的资源量为约为705万kg。
3 两种声学手段的对比分析
3.1 体长分布频率对比
根据Echoview对BioSonics DT-X数据进行单体检测的结果,青草沙水库鱼类的平均TS值为-49.36 dB,TS值集中分布于-60~-45 dB。根据青草沙水库的历史数据以及现场捕捉到的鱼类,青草沙水库的鱼类全为有鳔鱼类,且通过Love公式计算得到的最大体长与捕捞得到的鱼类的最大体长值大致相同,故本次研究采用Love提出的有鳔鱼类目标强度与体长的经验公式。通过经验公式换算后发现青草沙水库鱼类体长主要分布在0~30 cm之间,其中体长0~10 cm的鱼类数量最多,体长50 cm以上的鱼类占比较小。
根据Echoview通过DIDSON图像提取出的鱼类信息分析可知青草沙水库鱼类体长主要为0~30 cm,其中体长为10~20 cm的鱼类最多(如图5)。两种仪器的测得鱼类体长结果的相关系数约为77%。
尽管DIDSON和BioSonics DT-X的探测结果都显示青草沙水库的鱼类体长大小都集中分布于0~30 cm之间,但0~10 cm和10~20 cm这两个区间内,两种仪器的差别较大。原因在于体长较小的鱼在DIDSON中难以识别,造成DIDSON测得的鱼类体长分布在0~10 cm的区间内较低。在测量体长较小且密集分布的鱼类时,单频回声探测仪较DIDSON更具有优势。
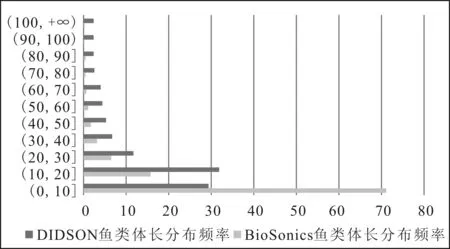
图5 DIDSON和BioSonics DT-X鱼类体长频率分布对比图Fig.5 Comparison of fish length and frequency distribution resulted by DIDSON and BioSonics DT-X
3.2 水平密度分布对比
对DIDSON数据中提取的鱼类位置分布,先将水库在ArcGIS中网格化,计算航线经过的网格中的鱼群的平均密度,最后利用反距离加权插值法(IDW)预测库区的鱼群密度分布(如图6)。对BioSonics DT-X各个采样单元的密度使用反距离加权插值法(IDW)得到整个库区的鱼群密度分布(如图7)。
通过对比分析可以发现,青草沙水库的东部和中部区域鱼群密度较高而西北部区域鱼群密度较低,两种仪器评估出的鱼群水平密度分布基本吻合。从青草沙水库本身的环境看,东部为取水区,水深;中部为过渡区,水位中等,这两个区域更适合鱼类栖息;而西部为纳水区,水浅、浑浊,鱼群密度较低。两种仪器的评估结果与实际情况相吻合。
但在西北部的少数地区,通过BioSonics DT-X计算的鱼群密度较DIDSON计算得到的鱼群密度更大。推测可能是由于西北部地区水浅且流速快,船在航行过程中可能会产生大量气泡,BioSonicsDT-X在探测过程中受气泡影响较大,使得计算结果比实际情况偏高。这也说明在浅水地带,DIDSON所受干扰较回声探测仪更小。

图6 DIDSON航线上鱼群密度水平分布图Fig.6 Horizontal density distribution of fish resulted by DIDSON
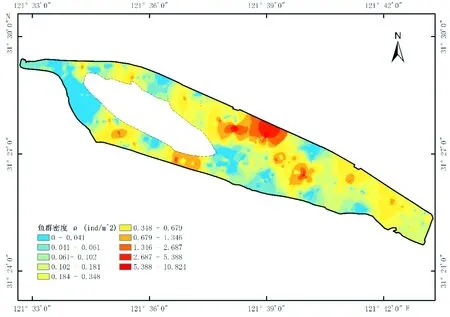
图7 BioSonics DT-X鱼群密度水平分布图Fig.7 Horizontal density distribution of fish resulted by BioSonics DT-X
3.3 垂直密度分布对比
本次调查中探测到的青草沙水库最大水深为18.06 m,平均水深为8.87 m。为了方便地表示出鱼群在青草沙水库中的垂直分布,人为地把每5 m作为一个水层单元,整个水库共分为3层,分别为:水库上层(<5 m),水库中层(5~10 m)和水库底层(>10 m)。
对DIDSON和BioSonics DT-X的数据进行分析后,发现两种仪器都显示水库中层的鱼群密度较大,而水库底层的鱼群密度较小(如图8)。但DIDSON在各层的密度值上较数字回声探测仪小。原因可能为在处理DIDSON数据时体长较小的鱼易被忽略,导致DIDSON评估的鱼群密度较BioSonics DT-X偏低。

图8 DIDSON和BioSonics DT-X不同水层鱼群密度分布对比图Fig.8 Comparison of the fish density distribution in different water layers by DIDSON and BioSonics DT-X
3.4 两种仪器的适用场景分析
数字回声探测仪和双频识别声呐DIDSON都可以用于评估渔业资源,但两种仪器各自拥有不同的适用场景。
对于数字回声探测仪如BioSonics DT-X,在鱼群集群现象比较突出以及调查区域鱼类体长普遍较小的时候,可以发挥比较大的优势。与此同时,当调查涉及到更多的项目,如沉水植物与底质等,使用回声探测仪更加方便。但在测区水深较浅时,其受气泡等因素干扰较大。
对于双频识别声呐DIDSON,当调查区域鱼类大多为单体分布,且鱼类的体长普遍较大时,较为适用。当测区平均水深较浅时,也适合适用DIDSON进行渔业资源评估,以排除气泡影响。同时由于DIDSON可以直观地反映水下物体包括鱼类,因此它更适用于定点观测和对鱼类的行为学调查。
两种仪器的原理、性能指标和价格有很大差异,应针对具体条件选择使用。
[1]Zhao X Y,Wang Y,Dai F.Depth-dependent target strength of anchovy (Engraulisjaponicus)measured in situ [J].ICES J Mar Sci,2008,65(6):882-888.
[2]唐启升,王为祥,陈毓桢,等.北太平洋狭鳕资源声学评估调查研究[J].水产学报,1995,19(1):8-20.
[3]王崇瑞,张 辉,杜 浩,等.采用BioSonics DT-X超声波回声仪评估青海湖裸鲤资源量及其空间分布[J].淡水渔业,2011,41(3):15-21.
[4]孙明波,谷孝鸿,曾庆飞,等.基于水声学方法的太湖鱼类空间分布和资源量评估[J].湖泊科学,2013,25(1):99-107.
[5]童剑锋,韩 军,浅田昭,等.基于声学摄像仪的溯河洄游幼香鱼计数[J].渔业现代化,2009,36(2):29-33.
[6] 张 进.基于双频识别声呐 DIDSON的鱼群定量评估技术[D].上海:上海海洋大学,2012.
[7] 叶昌臣,黄 斌.渔业生物数学[M].北京:农业出版社,1990:171-180.
[8] 张慧杰.长江宜昌和宜宾江段鱼类资源的水声学初步调查[D].武汉:华中农业大学,2007.
[9] Traynor J J,Ehrenberg J E.Fish and standard sphere target sthren-gth measurements obtained with a dual-beam and split-beam eco-sounding system[J].Rapports et Proces-Verbauxdex Reunions,ICES,1990,189:325-335.
[10]Brede R,Kristensen F H,Solli H,et al.Target tracking with a split-beam echo sounder[J].Rapports et Proces-Verbauxdex Reunions,ICES,1990,189:254~263.
[11]刘立昕.前视声呐目标跟踪技术研究[D].哈尔滨:哈尔滨工程大学,2011.
[12]王晓峰.成像声呐波束形成新技术研究[D].哈尔滨:哈尔滨工程大学,2011.
[13]刘慧杰,王从锋,刘德富,等.双频识别声呐在鱼类资源调查中的应用进展[J].三峡大学学报(自然科学版),2015,37(3):28-34.
[14]刘歆璞,王丽卿,张 宁,等.青草沙水库后生浮游动物群落结构及其与环境因子的关系[J].生态学杂志,2013,32(5):1238-1248.
[15]胡忠军,吴 昊,陈立侨,等.长江口青草沙水库正式供水前的鱼类群落结构特征[J].水产学报,2012,36(8):1234-1241.
[16]王绍祥,高春霞,田思泉,等.青草沙水库中上层鱼类群落组成及多样性分析[J].上海海洋大学学报,2014,23(4):594-601.