基于模拟退火的近浅海系泊系统仿真
2018-01-22谭丰林许海城谌子民唐西林
谭丰林+许海城+谌子民+唐西林


摘 要: 根据近浅海观测网的运输节点系泊系统的海洋环境特征,采用拟牛顿迭代算法求解不同风速和水深的钢桶、钢管倾角、重物球质量、浮标吃水深度及游动区域。考虑到求解的收敛性,采用模拟退火确定一个优质解作为初值,提出增加一个随模拟退火温度线性减小的控制更新幅度的参数,在大范围搜索时以一定概率接收搜寻到的解;随后在已找到的优质解附近小范围搜索。不同条件下的仿真锚链形状显示,其变化趋势符合风速和受力等条件的影响趋势,改进的模拟退火方法具有实用性。
关键词: 系泊系统设计; 模拟退火; 拟牛顿迭代算法; Runge?Kutta方法; 锚链形状; 海洋浮标
中图分类号: TN967.7?34; TN911.73 文献标识码: A 文章编号: 1004?373X(2018)02?0001?05
Abstract: According to the marine environment features of the mooring system which is the transport node of the neritic observation network, the quasi?Newton iteration algorithm is used to calculate the inclination of barrel and tube, mass of weight ball, draft and nomadic range of buoy under different wind speeds and water depths. In view of the convergence of calculation, the simulated annealing is adopted to determine an elegant solution as an initial value. Addition of the parameter which linearly decreases with simulated annealing temperature and controls updating amplitude is proposed. The searched solutions are accepted with a certain probability during the large range search. Then the small range search is carried out around the found elegant solutions. The simulated mooring line chain shapes under different conditions shows that the change trend of line chain shapes complies with the influence trend of conditions like wind speed and force, and the improved simulation annealing method has practicality.
Keywords: mooring system design; simulated annealing; quasi?Newton iteration algorithm; Runge?Kutta method; mooring chain shape; marine buoy
0 引 言
浮标系统的研究在海洋资源开发利用和海洋事业发展中具有重要意义。在海洋浮标中,浮标锚系的配置和结构是保障浮标正常工作的关键部分。海上影响系泊系统的因素繁多[1?3],系统的仿真设计成为日益重要的设计环节。本文针对近浅海观测网的运输节点设计,研究参数的最优解。近浅海观测网节点由漂标、系泊装置、水声通信装置和锚组成。为了实现整体性能最优,本文拟解决以下问题:
1) 在海水静止的条件下,建立近浅海系泊系统的模型与计算的算法,即受力分析模型;
2) 计算海面风速为12 m/s和24 m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域;
3) 风速为36 m/s时进行求解,钢桶倾斜角不超过5°,锚链在锚点与海床夹角不超过16°;
4) 给出考虑风力、水流力与实际水深波动的近浅海系泊系统模型,并分析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
仿真假定的条件如下:
1) 假设海平面波浪波动对水深的影响可忽略;
2) 假设系泊系统中各部件的形状与质量固定,不受海水腐蚀影响;
3) 因锚链由无档链环组成,故水流可以穿过链环,近似视其为一根柔软均匀的曲线,视作用于锚链上的水流力可忽略。
1 受力模型建立及求解
1.1 海水静止条件下的受力图
将系统分割为浮标、钢管、铁桶、锚链四部分。将四节钢管先视为一整体分析,依结果再拆分为四节进行研究。因每节锚链长度较短,采用微分法分析[4?5]。
1.2 浮标受力分析
如图1所示,设θ是浮标法线方向与海平面所夹锐角,h是浮标吃水深度,浮标有效迎风面积S由一长方形加半个椭圆构成:
拉力方向为斜向下与海平面夹角(0<<),作用点为钢管与浮标连接点,浮体风荷载力与钢管对浮标的拉力水平分力平衡,得等式如下:
浮标自身重力,水对浮标浮力以及四节钢管对浮标的拉力竖直分量平衡,有浮标竖直方向力平衡方程:
1.3 钢管整体受力分析endprint
钢管受力如图2所示,浮标的拉力,斜向上与海平面夹角为,与钢桶的拉力,斜向下与海平面夹角为,在水平方向的分力平衡,得:
重力与水对钢管浮力和浮标对钢管的拉力的竖直分力,以及钢桶对钢管的拉力的竖直分力平衡,得:
将四根钢管看作一个整体,可解出整体两段分别受浮标和钢桶作用力大小与方向。再将第一根钢管、浮标看成一个整体,求出第一根作用力大小与方向。其他三根类似解出。
1.4 钢桶受力分析
钢桶受力如图3所示,钢管拉力,锚链拉力,它们与水平方向的夹角分别为和,钢桶自重,浮力,重物球的拉力,水平和竖直方向力平衡以及力矩平衡分别如下:
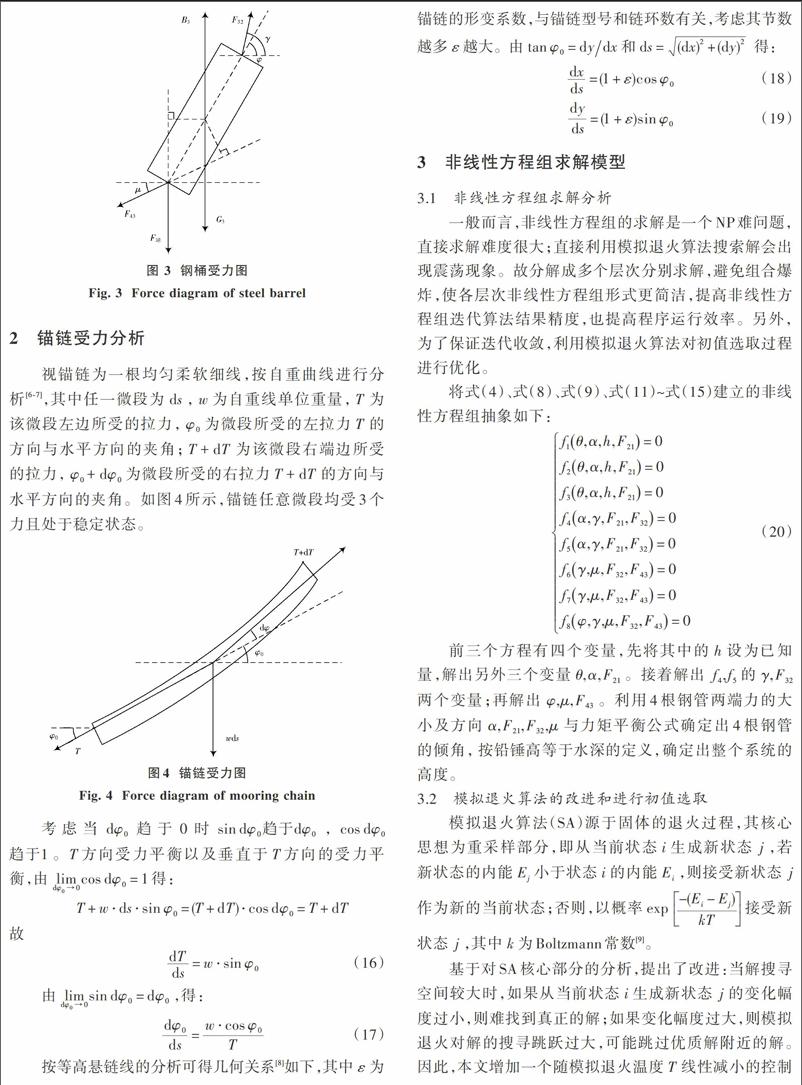
2 锚链受力分析
视锚链为一根均匀柔软细线,按自重曲线进行分析[6?7],其中任一微段为,为自重线单位重量,为该微段左边所受的拉力,为微段所受的左拉力的方向与水平方向的夹角;为该微段右端边所受的拉力,为微段所受的右拉力的方向与水平方向的夹角。如图4所示,锚链任意微段均受3个力且处于稳定状态。
考虑当趋于0时,。T方向受力平衡以及垂直于T方向的受力平衡,由得:
按等高悬链线的分析可得几何关系[8]如下,其中为锚链的形变系数,与锚链型号和链环数有关,考虑其节数越多越大。由和 得:
3 非线性方程组求解模型
3.1 非线性方程组求解分析
一般而言,非线性方程组的求解是一个NP难问题,直接求解难度很大;直接利用模拟退火算法搜索解会出现震荡现象。故分解成多个层次分别求解,避免组合爆炸,使各层次非线性方程组形式更简洁,提高非线性方程组迭代算法结果精度,也提高程序运行效率。另外,为了保证迭代收敛,利用模拟退火算法对初值选取过程进行优化。
将式(4)、式(8)、式(9)、式(11)~式(15)建立的非线性方程组抽象如下:
前三个方程有四个变量,先将其中的设为已知量,解出另外三个变量。接着解出的两个变量;再解出。利用4根钢管两端力的大小及方向与力矩平衡公式确定出4根钢管的倾角,确定出整个系统的高度。
3.2 模拟退火算法的改进和进行初值选取
模拟退火算法(SA)源于固体的退火过程,其核心思想为重采样部分,即从当前状态生成新状态,若新状态的内能小于状态的内能,则接受新状态作为新的当前状态;否则,以概率接受新状态,其中为Boltzmann常数[9]。
基于對SA核心部分的分析,提出了改进:当解搜寻空间较大时,如果从当前状态生成新状态的变化幅度过小,则难找到真正的解;如果变化幅度过大,则模拟退火对解的搜寻跳跃过大,可能跳过优质解附近的解。因此,本文增加一个随模拟退火温度线性减小的控制状态更新幅度的参数,其中,为初始温度,是设定的最小温度,是当前温度。和则依计算对象不同进行设定,如计算角度取,等。在大范围搜索初期,以一定概率接受搜寻到的解;搜索后期,则在已找到的优质解附近进行小范围搜索,以此保证搜索的收敛性。模拟退火算法的输入为需要最小化的目标(误差)函数,输出:使取最小值的解的流程如下:
1) 令,即开始退火的初始温度,随机生成初始解,并计算相应的目标函数;
2) 令等于冷却进度表的下一个值;
3) 根据当前温度计算更新幅度参数;
4) 根据当前解进行按更新幅度参数的幅度进行扰动,产生一个新解,计算相应的目标函数值,得到;
5) 若,则新解被接受,作为新的当前解;若,则新解按概率接受,为当前温度;
6) 在温度下,重复次的扰动和接受过程,即执行步骤3)和步骤4);
7) 判断温度是否已冷却到最小温度:是,则终止算法;否,则转步骤2)。
3.3 通过DFP算法下的拟牛顿迭代法对模型求解
拟牛顿算法解非线性方程组具有收敛快的特点,其改进了牛顿迭代法每一步需求解非线性方程组的Jacobi矩阵的逆矩阵所导致的计算量大的问题,以正定矩阵近似Jacobi矩阵的逆矩阵降低了计算复杂度,显著提高程序运行效率。每一非线性方程组先用模拟退火算法搜寻到一个优质解,再利用拟牛顿迭代公式求解。算法流程如图5所示。
4 模型应用的仿真结果
4.1 基于四阶Runge?Kutta方法的锚链方程数值解
四阶Runge?Kutta方法[10](四阶R?K)是目前常用的常微分方程单步法,具有精度高且便于改变步长的特点。由于四阶R?K法的导出基于Taylor展开,所以精度依赖于解函数的光滑性。
4.2 受力分析模型仿真结果
根据第2节与第3节的模型给出不同风速下系泊系统中各部件的位置信息与锚链形状见表1及图6~图8。
4.3 以重物球质量为变量的目标规划模型
当仅考虑海面风速为36 m/s时,其他条件不变的情况下,调节重物球的质量,使得钢桶的倾斜角度不超过5°,锚链在锚点与海床的夹角不超过16°,则目标函数:钢桶倾斜角尽可能小,浮标吃水深度尽可能小,浮标游动范围尽可能小。约束条件为钢桶倾斜角不超过5°;锚链与河床夹角不超过16°。不同风速下各部件位置见表2。
以重物球的质量为变量,可以求出钢桶倾斜角、吃水深度和浮标游动范围,这三个量是关于的函数,目标所要求的三个量转为求最小值问题,由此建立以下目标规划模型进行优化:
式中的与可由式(4),式(8),式(9),式(11)~式(15)与锚链部分的式(16)和式(17)联立求得。
5 结 语
将非线性方程组分层,分别对各层进行求解,大大降低了求解非线性方程组的难度,提高了稳定性和效率。通过对模拟退火算法改进,优化了拟牛顿迭代算法的初值选取,保证了算法的收敛性,使拟牛顿迭代求得的非线性方程组的解具有很高的精度。从锚链形状的仿真结果看,也符合同方向的风力越大,浮标越远的实际情况,说明改进的模拟退火方法具有实际作用。endprint
参考文献
[1] 王小波,韩端锋,刘峰,等.深水作业浮标系泊系统研究与设计[J].船舶,2012,23(6):61?65.
WANG Xiaobo, HAN Duanfen, LIU Feng, et al. Research and design of deep water buoy mooring system [J]. Ship & boat, 2012, 23(6): 61?65.
[2] 陈小红,黄祥鹿.单点系泊海洋资料浮标的动力分析[J].中国造船,1995(3):1?8.
CHEN Xiaohong, HUANG Xianglu. Dynamic analysis of a single moored sea data buoy [J]. Ship building of China, 1995(3): 1?8.
[3] SVENSSON O, LEIJON M. Peak force measurement on a cylindrical buoy with limited elastic mooring [J]. IEEE journal of oceanic engineering, 2014, 39(2): 398?403.
[4] 朱忠显,尹勇,杨晓,等.多成分悬链线锚泊系统的静力特性分析[J].大连海事大学学报,2015,41(4):1?7.
ZHU Zhongxian, YIN Yong, YANG Xiao, et al. Static analysis of multi?component catenary mooring system [J]. Journal of Dalian Maritime University, 2015, 41(4): 1?7.
[5] DRISCOLL F R, VENEZIA W, CURIC D, et al. A combination air deceleration and mooring module for A?sized buoys [J]. Oceans, 2002, 1: 433?440.
[6] 潘斌,高捷,陈小红,等.浮标系泊系统静力计算[J].重庆交通学院学报,1997,16(1):68?73.
PAN Bin, GAO Jie, CHEN Xiaohong, et al. Static calculation of buoy mooring fast [J]. Journal of Chongqing Jiaotong Institute, 1997, 16(1): 68?73.
[7] 何惠际.无档链环的应力分析[J].镇江船舶学院学报,1991,5(4):22?29.
HE Huiji. Stress analysis of studless chain [J]. Journal of Zhenjiang Shipbuilding Institute, 1991, 5(4): 22?29.
[8] 卓金武.Matlab在数学建模中的应用[M].2版.北京:北京航空航天大学出版社,2014.
ZHUO Jinwu. Application of Matlab in mathematical modeling [M]. 2nd ed. Beijing: Beihang University Press, 2014.
[9] MOLER C B. Matlab数值计算[M].喻文健,译.北京:机械工业出版社,2006.
MOLER C B. Numerical computing with Matlab [M]. YU Wenjian, translation. Beijing: China Machine Press, 2006.
[10] 何满喜,曹飞龙.计算方法[M].北京:科学出版社,2016.
HE Manxi, CAO Feilong. Calculation method [M]. Beijing: Science Press, 2016.endprint
