生产流水线双向仿真系统模型
2018-01-18
(武汉理工大学 机电工程学院,武汉 430070)
0 引言
进入21世纪,互联网,新能源,新材料正在以极快的速度形成巨大的产业能力以及市场,产业链将被分工重组,整个工业生产体系将进入一个新的水平,工业4.0时代的产物即将体现在我们的生活中,具有“人-机”“机-机”相互通信能力的信息物理融合系统必将普遍应用在工业生产中。工业4.0提出的智能制造是面向产品全生命周期,实现泛在感知条件下的信息化制造,工业4.0的三大主题之一“智能工厂”也将成为未来成产的潮流,人们对于物质文化的需求日益增长,也要求着制造业再次升级[1]。然而传统的生产方式,生产技术,生产设备等却限制着制造业的进一步发展,如何加快人才培养,传递先进的生产概念已经成为深化改革、促进社会生产力发展亟待解决的问题。目前,高校普遍与企业建立合作培养人才的关系,学生通过到企业观察实习,将理论与实际结合起来,但是学生对于大型生产流水线的学习难免走马观花,导致对生产流程、工序设计以及生产线的实际生产问题如误工、误时等无从知晓。同时,高校自身受资金和场地限制,很难提供完整的实践实验条件。
所以如今,通过建立适当的模型来模拟大型生产过程已经成为一种有效的实验方式,从建设规模来看,主要有大规模试验平台模型,中小型仿真模型和软件仿真模型,综合考察资金与演示的直观性,在教学中,多采用中小型仿真模型,以小型的实物模型作为模拟对象,构成一个小型的实验教学平台[2]。因此,可以建立一种以慧鱼模型为基础的生产线双向仿真实验平台,满足对学生的教学培养要求。
1 研究现状
对于生产流水线的软件仿真部分,综合考量3dmax,SolidWorks,FlexSim等动画仿真软件,基于FlexSim能进行生产流程、生产元素、生产执行人以及生产时间等的参数设置,更接近实际生产流水线的生产过程,采用FlexSim进行仿真。FlexSim是由美国FlexSim公司开发,是工程师、管理者和决策人对提出的“关于操作、流程、动态系统的方案”进行试验、评估、视觉化的工具,可以用来对离散系统进行建模,系统根据特定事件发生的结果在离散时间点改变状态。于FlexSim的应用的研究主要在物流系统的设计以及车间生产安排等方面,东南大学自动化研究所的张卫德就提出了基于FlexSim的生产线仿真和应用[3],武汉理工大学的肖锋则是提出一种基于FlexSim的码头的仿真[4]。
对于生产流水线模型的实物模型部分,慧鱼创意组合模型作为一种工程技术类拼装模型,是创新教育和创新实验的优良载体。国内针对如何将慧鱼创意组合模型更好的应用在高校教学中进行了进一步的探究,东北大学的牛艺静提出利用VC++为编程软件,开发慧鱼模拟软件[5],慧鱼创意组合更多的被利用在高校创新教育上,通过构建或模拟现实发挥创意来完成模型组建,其中华南理工大学的周述璋就介绍了基于慧鱼模型的创新实例[6]。
总之,目前慧鱼创意组合模型越来越多的被高校用来作为培养高校学生创新能力的教具,也有研究探究了慧鱼创意组合模型的仿真控制,而FlexSim主要用来仿真物流系统等的运作,本文则采用二者去模拟现如今的自动生产流水线的生产过程的可视化监控。
2 系统设计
2.1 系统组成
本文在对制造业生产流水线的生产特点和方针原则进行学习分析后,得出按工位建模的思想。按照车间工位的特点,设计了一条生产流水线为范例来进行模拟,用以说明如何基于FlexSim和慧鱼模型进行生产流水线的双向仿真。生产流水线双向仿真系统模型主要包括实体模型部分和仿真控制部分两个部分,在PC端FlexSim软件完成仿真模型的建立,并映射在慧鱼模型上完成流水线生产仿真的运程,当工件模型在慧鱼模型上模拟加工过程时,由传感器收集工件模型的运动信息,并反馈到PC端用于数据分析,从而实现双向仿真。
为了完成生产流水线双向仿真系统模型的构建,主要包括三个方面,设计一条试验仿真的生产线,基于FlexSim对流水线生产过程进行仿真以及对流水线生产过程的可视化监控。

图1 系统组成图
2.2 试验仿真的生产流水线的设计
以铣、钻两道工序生产为示例设计一个串联物流系统,铣床和钻床按工艺顺序依次排列,用自动运输装置和其他辅助设置将其连接起来并依次进行加工,以电气装置作为控制装置,使整个系统按照规定的程序和节拍进行工作。整个生产流水线实物模型由慧鱼创意组合模型搭建而成,用来说明本项目的所能实现的功能。

图2 加工流程图
生产线工艺流程为:工件从上料口由传送带到铣床工位,铣床进行预设加工过程,加工完成后再经由传送带运送到钻床工位,钻床完成预设的加工,最后工件被传送到下料口。
由于仿真的目的是为了展示效果以及对仿真结果进行分析,故此对生产流水线模型进行简化,铣床、钻床的运动主要有工作台的横向进给、纵向进给、回转工作台的回转运动,主轴沿立柱的进给运动以及主轴自身的旋转运动,现将机床的运动简化为(x,y,z)维度上的运动,主要包括工件的横向进给,工作台的纵向进给,沿立柱的升降运动,以及刀具的回转运动,用以表现钻床,铣床的加工功能。

图3 生产流水线实物工程图
2.3 基于FlexSim对流水线生产过程进行仿真
FlexSim软件能够进行离散时间系统建模,每一个对象都有一个坐标(x,y,z)速度(x,y,z)旋转以及一个动态行为(时间)对象可以创建、删除,而且可以彼此嵌套移动,它们都有自己的功能或继承来自其他对象的功能。FlexSim允许用户建立自己的模拟对象来满足使用需求,故可首先在SolidWorks建立钻床、铣床的模型,再由FlexSim导入3D模型,并拉取发生器等,构建生产流水线模型。
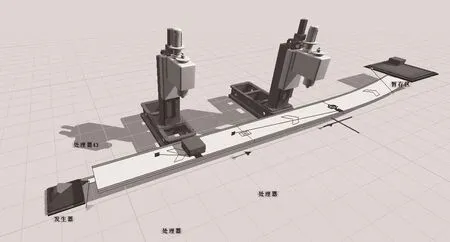
图4 生产流水线仿真模型
建立一个完整的物流仿真系统,需要对系统原始数据进行收集分析,包括工艺流程、时间、作业单位等。工艺流程为待加工的工件由上料口进入生产流水线进行加工,再经传送带运送到加工位,检测到到达加工位后,刀具开始运动到加工位,工件开始加工,加工完成后由下料口离开。由于实际加工过程是人为操作的,在模型中无法表示,因此采用定时器模拟加工过程所消耗的时间,电机速度亦为设定值。由于模拟生产流水线为自动化生产,无操作人员,作业单位为两台机床。
2.4 对流水线生产过程的可视化监控
慧鱼创意组合模型可采用LLWIM3.0和PLC作为编程控制,但是LLWIM3.0其表达效果仅为功能模块的拖动,不能实现可视化监控,而FlexSim的资料,图像和结果都可以与其他软件公用,主要通过从Excel表读取资料和输出资料。基于本文的研究目的,把PLC作为FlexSim与慧鱼创意组合模型的中介,从而FlexSim能通过PLC完成与基于慧鱼创意组合模型搭建的实物模型之间的数据交换,数据收集系统通过PLC将收集的实时数据传给FlexSim,同时将实际模型运行状态反映在FlexSim仿真平台上。
结合系统的实际需求,采用FX1N-60MR-001为实现控制模块的PLC,控制规模为60点,36点输入,24点输出,继电器输出,运算快速,基本指令能达到0.55~0.7μs,从而保证双向仿真的节拍有序进行。

图5 数据处理过程
具体的数据处理过程主要包括PLC数据的采集以及FlexSim数据的调用,将数据库作为PLC和FlexSim的中介。创建一个数据库后,可以将PLC中的外部控制数据等会保存到对应的内部数据库变量中,然后通过WinCC的全局 C 脚本动作触发程序,周期性地通过内部变量采集与PLC相关的外部变量的值,通过编程语言实现内部变量和外部变量的双向赋值,而FlexSim可通过ODBC接口访问数据库,过程为:创建数据源名称→在FlexSim脚本中利用dbopen命令打开相应的数据库→对数据库的数据进行调用。最后完整实现FlexSim对于慧鱼模型运作过程的动画仿真,同时数据库的数据作为PLC命令的判断条件之一,通过判断判断条件是否成立,完成对慧鱼模型相应的控制。
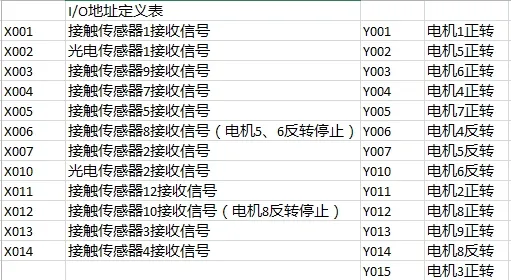
图6 I/O定义口
在程序设计上,对多个接触式传感器、光电传感器、电机编号并确定对应的PLC接口,传感器接收的信号经由PLC存至数据库,反映在FlexSim上的模型,再由程序对比判断每一步工序是否继续,从而PLC控制慧鱼模型停止工作或是继续工作。
3 系统运行

图7 运行过程图
仿真过程为:首先在FlexSim中确定相应的参数值,装置启动后,基于FlexSim搭建的生产流水线仿真模型的工作动画和基于慧鱼创新组合模型搭建的生产流水线模型开始同步运作,慧鱼模型的实际运作状态被实时反馈在FlexSim的动画仿真演示上,当收集的数据表示慧鱼模型实际工作与预设工序不同时,在FlexSim上显示模型的运作状态,弹框警示工序出错,同时相应数据被调用,PLC执行相应的慧鱼模型停止工作同时红灯警示的命令。
在得到几组数据后,使用ExpertFit来分析得到最佳的概率分布函数以及相对应的参数值,创建一个新项目→选择分析类型→进入数据分析界面→导入数据→选择最佳概率分布函数→比较选择概率分布函数→确定正态部分函数的参数,可通过数据分析过程得到数据分析结果以及最优的参数。如果需要对生产流水线进行重新设计,慧鱼创意组合模型可以重新拆装,而PLC程序也可以在计算机上编辑,修改程序。

图8 仿真运行图
4 结论
本文利用慧鱼创意组合模型对实际的生产流水线进行仿真,同时在FlexSim搭建平台并通过交互式信息终端采集信息的方法,保证实时、准确、全面对流水线生产进行信息采集,便可以在仿真系统中实时观察到流水线三维模型的运行情况,当生产出现故障时,能在监控里面实时显示相关工件信息,方便及时发现问题,快速解决故障。能普及智能化生产流水线的概念,预先加强学生对于制造业升级的意识,并进行一定的时间培养,利于与企业工作的接轨,适应如今提倡的提高高校学生动手能力,为企业以及学术研究领域培养人才的要求。对各种先进制造模式,如精益生产、敏捷制造、并行工程等的研究有一定实践意义。
[1]张曙.工业4.0和智能制造[J].机械设计与制造工程,2014(8):1-5.
[2]张毅.基于自动生产线的仿真教学系统设计与研究[D].南京:南京理工大学,2014.
[3]张卫德,严洪森,徐成.基于FlexSim的生产线仿真和应用[J].工业控制计算机,2005:46-47.
[4]肖锋.基于FlexSim集装箱码头仿真平台关键技术研究[D].武汉:武汉理工大学,2006.
[5]牛艺静.慧鱼模拟软件的研究与开发[D].沈阳:东北大学,2009.
[6]周述璋.基于慧鱼模型的机械创新设计[J].信息技术2014:123-131.
[7]许晨,基于的某汽车装配车间物流建模与仿真研究[D],山东;山东大学,2008.
[8]漆向军,陈霖.基于LLWin3.0控制Fischertechnik模型实例[J].农机化研究,2004(4):194-196.
[9]谢小成,姜莉莉,许玉枝.面向 PLC自动控制生产过程的实时仿真系统设计[J].中北大学学报,2012(3):282-286.
[10]赖明勇.物流信息系统驱动FlexSim的仿真互操作机制研究[J].湖南大学学报,2009:83-87.
