隧道与声屏障综合清洗车工作装置液压系统仿真
2018-01-18韩国武陈新轩
韩国武,荆 蓓,樊 琪,陈新轩,李 博,李 平
(1.陕西省高速公路建设集团西耀分公司,陕西 西安 710065; 2.长安大学 工程机械学院,陕西 西安 710064)
0 引 言
当前,中国隧道墙面、声屏障的清洗与养护还处于人工操作水平,主要是由清洁工人使用简单的工具清洗,或者借助于公路护栏清洗车来清洗,不仅效率低,而且会造成安全隐患。隧道、声屏障清洗车可以完成隧道墙壁面与声屏障的清洗工作,不仅能够节省时间、降低能源损耗,而且能够保证作业质量,提高效率[1-4]。清洗车工作装置的液压系统是其关键部分,决定着清洗车工作装置的工作和运行情况。
本文以某隧道、声屏障综合清洗车的工作装置为例,阐述其液压系统的基本结构和工作原理,并建立液压系统的仿真模型,针对清洗最大半径位置工况,对液压系统进行动态仿真,分析该工作装置液压系统的动态特性。
1 清洗车工作装置的基本结构及液压系统工作原理
1.1 工作装置的基本结构

图1 工作装置结构
隧道、声屏障清洗车主要是通过安装在汽车底盘前的工作装置来实现对隧道壁面或声屏障的清洗。工作装置由转盘、机械臂、油缸、刷锟等组成,如图1所示。液压马达驱动转盘将机械臂1、机械臂2、机械臂3及滚刷调整至最佳的工作位置。机械臂之间通过销轴铰接,依次由大臂油缸、副臂油缸、小臂油缸、角度调整油缸驱动,根据不同的作业工况可以调整机械臂之间的夹角,以保证清洗效果[5-8]。

图2 工作装置液压系统原理
1.2 液压系统的工作原理
隧道、声屏障清洗车的工作装置工作时,机械臂及滚刷的运动都需要液压系统提供动力,液压系统主要由定量泵、溢流阀、电磁换向阀、两位两通液控阀、平衡阀、梭阀、液压缸、马达、连接管路、液压油箱等组成。液压系统原理如图2所示。当二位二通液控阀工作在上位时,直接回油,液压缸与马达均不工作;当二位二通液控阀工作在下位,三位五通电磁换向阀1处在工作位时,大臂油缸工作。同理,当三位五通电磁换向阀2、3、4、5在工作位时,副臂油缸、小臂油缸、角度调整油缸及回转马达工作。溢流阀为安全阀,当电磁换向阀在工作位时,溢流阀始终与高压相连,当负载过大时,溢流阀就会溢流,保护液压回路。当二位二通液控阀2工作在左位,同时二位五通电磁换向阀工作在上位时,清洗马达开始工作[9-10]。二位二通液控阀2的作用是保证泵输出压力与负载压力的压差不变,使得马达的转速只与二位五通电磁换向阀的开口面积有关,而与执行元件的负载大小无关。整个液压回路采用并联连接,各液压缸与马达之间的工作互不影响[11-12]。根据不同的清洗工况,通过给定电磁换向阀电信号来控制电磁换向阀的工作位,进而控制液压缸及其液压马达的动作,使机械臂处于合适的位置,以实现清洗过程,保证清洗效果。
2 清洗车工作装置液压系统的建模与仿真
2.1 AMESim软件
AMESim ( Advanced Modeling Environment for Performing Simulation of Engineering Systems, 工程系统仿真高级建模环境)是专门用于工程机械液压系统的建模仿真及动力学分析的软件。AMESim软件提供了一个标准的仿真模型库,包括液压、控制、机械、电气等。由于液压系统元件的多样性,AMESim还建立了一个基本元件的设计库HDC(Hydraulic Component Design),其中包含了任何机液系统的基本结构单元模块。通过使用HDC,用户可以根据自己的需要建立标准库中没有的液压模型[13-14]。
2.2 清洗车工作装置液压系统的建模
根据清洗车工作装置液压系统原理,在AMESim液压元件库中找到相应的溢流阀、电磁阀等液压元件模型,利用HCD库搭建二位二通液控阀等特殊元件模型,并添加必要的信号源模型,建立如图3所示的工作装置液压系统仿真模型。

图3 工作装置液压系统AMESim模型
各液压缸电磁阀的控制信号输入如图4所示。

图4 各液压缸电磁阀的控制输入信号
2.3 仿真及结果分析
隧道、声屏障清洗车工作装置的作业过程主要包括4个工况:隧道最高位置清洗、最大半径位置清洗、最低位置清洗及声屏障背面清洗。本次仿真以隧道最高位置清洗工况作为仿真初始状态,如图5所示。按照所建立的隧道、声屏障清洗车液压系统仿真模型,进入参数设置模式并设置好各元件模型的参数;然后进入运行模式,设置步长为0.1 s,仿真时间为15 s,对该清洗车工作装置的最大半径位置清洗姿态调整工况进行仿真分析。

图5 仿真初始状态

图6 油缸活塞位移曲线
(1)各液压缸活塞位移曲线如图6所示。由图6可知,该工作装置的各种姿态与各液压缸的运动过程输入的信号相对应。同时,只要设置比较合理的参数,液压缸活塞就可以实现平稳的运动。大臂油缸、副臂油缸、角度调整油缸的位移随给定信号的变化到达指定位置后趋于平稳,保持不变,而小臂油缸的位移一直保持不变,图中出现波动主要是因油液、液压缸及油管具有弹性而产生的冲击现象[15]。
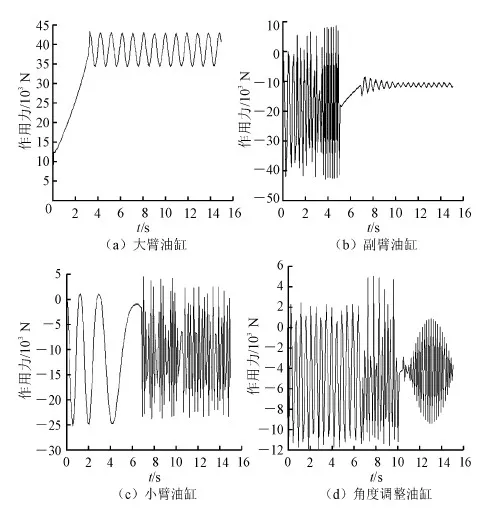
图7 液压缸作用力曲线
(2)各液压缸的受力曲线如图7所示。由图7可知,大臂油缸的作用力先逐渐增大,然后在40 000 N附近波动,这是因为活塞杆在各液压缸交错动作的过程中要克服整个装置的惯性冲击力;副臂油缸在0~5 s内波动较大,这是由于0~5 s内副臂油缸位活塞杆没有位移变化,而工作装置调整过程中活塞杆克服惯性冲击力所致;小臂油缸的作用力一直在10 000 N附近波动,这是由于小臂油缸的位移一直不变,受机架自重的影响而产生抖动;角度调整油缸0~10 s内位移保持不变,也是由于各液压缸在交错运动的过程中要克服整个装置的惯性冲击力,在13 s出现剧烈振动[16-18]。
(3)各液压缸压力曲线如图8所示。由图8可知:大臂油缸无杆腔压力先增加,后在150 bar附近波动,这是因为无杆腔进压力油;而有杆腔压力先保持不变,3 s后在143 bar附近波动,这是由于有杆腔压力为回油路溢流阀产生的背压,背压进油压力平衡,从而实现平稳运动。同理,副臂油缸压力曲线、角度调整油缸压力曲线与大臂油缸压力曲线的分析类似[19]。小臂油缸无杆腔和有杆腔的压力一直处于波动状态,主要是由于小臂油缸位移一直保持不变,克服惯性冲击力而产生抖动。

图8 液压缸压力曲线

图9 液压缸无杆腔流量曲线
(4)各缸无杆腔流量曲线如图9所示。有杆腔的流量变化与无杆腔类似。由图9可知,各液压缸的流量变化与输入信号相对应,曲线中出现的波动是由于液压系统中各液压缸动作的交错启停产生的惯性冲击所致。大臂油缸流量刚开始逐渐增加是由于作用力的变化引起节流阀的通流量增加。副臂油缸、小臂油缸及角度调整油缸流量的变化均是由于活塞杆作用力变化进而造成节流阀通流量产生变化。副臂油缸在5 s时流量变化较大,是由于副臂油缸回路电磁阀在5 s时开始输入信号,副臂油缸突然开始运动产生冲击液压所致。同理,角度调整油缸在10 s时流量变化较大,也是由于所在回路电磁阀在10 s时开始输入信号,油缸突然开始运动产生液压冲击所致。
3 结 语
(1)以某隧道、声屏障清洗车工作装置为例,介绍了其基本结构和工作原理,并利用AMESim软件建立了该工作装置液压系统的仿真模型,针对其最大半径特定位置清洗工况,对模型设置合理参数并施加一定负载,完成隧道、声屏障清洗车工作装置液压系统虚拟仿真。
(2)通过AMESim液压系统仿真,得出了较为理想的各液压缸的压力仿真曲线、无杆腔流量仿真曲线及活塞位移仿真曲线。仿真图中出现的波动是因为工作装置在交错启停过程中惯性冲击所致,属于正常范围波动。
(3)仿真结果表明,所计算的泵的排量、溢流阀调定压力、缸的活塞直径等参数比较合理,为该隧道、声屏障清洗车工作装置液压系统其他工况的分析提供了一定依据,同时为清洗车液压系统与结构的进一步改进优化提供了参考,对隧道、声屏障清洗车工作装置液压系统设计也具有一定的指导意义。
[1] 邱凤群.隧道清洗车国内外研究概况及发展方向[J].建设机械技术与管理,2012(1):115-116.
[2] 徐有军.隧道清洗车工作装置的结构分析与避障研究[D].南京:南京理工大学,2013.
[3] 王 敏.扫路车液压系统设计与仿真分析[D].长春:吉林大学,2012.
[4] 覃海英.小型垃圾清扫车液压传动及控制系统的设计研究[D].南宁:广西大学,2012.
[5] 丘铭军,赵 航,姚 培.AMEsim软件及其应用[J].筑路机械与施工机械化,2005,22(8):60-61.
[6] 龚 进,冀 谦,郭 勇,等.AMESim仿真技术在小型液压挖掘机液压系统中的应用[J].机电工程技术,2007,36(10):111-114.
[7] 尚 刚,权 龙.基于AMESim的挖掘机回转液压系统仿真分析[J].液压气动与密封,2009,29(5):49-51.
[8] 顾海荣,王永奇,陶 伟,等.基于AMESIM的全液压推土机行走驱动系统仿真[J].筑路机械与施工机械化,2005,22(1):47-49.
[9] 赵文祥,严世榕.基于AMESim的轮式装载机工作装置建模与仿真研究[J].机床与液压,2014(1):123-127.
[10] 张 婧.混凝土泵车液压柔性臂架动力学分析与控制[D].沈阳: 东北大学,2006.
[11] 李海超,赵 悟,冯忠绪,等.基于AMESim的篱栏养护车工作装置液压系统仿真研究[J].建筑机械,2012(11):100-106.
[12] ZHAO Q,DUAN J J,WANG C.Modeling and Simulation of Vehicle Hydraulic ABS Based on AMEsim[J].Advanced Materials Research,2012(590):441-445.
[13] 杨益明,王 庆,刘奕贯.负载敏感节流调速回路的建模与仿真[J].筑路机械与施工机械化,2010,27(10):81-84.
[14] 刘昕晖,陈晋市.AMESim仿真技术在液压系统设计分析中的应用[J].液压与气动,2015(11):1-6.
[15] 王春生,刘长喜,司丽丽.基于AMESim的汽车起重机双向液压锁仿真研究[J].筑路机械与施工机械化,2011,28(2):77-78.
[16] 邬国秀.基于AMESim的阀控液压缸液压伺服系统仿真[J].机械,2008,35(1):33-35.
[17] 刘海丽.基于AMESim的液压系统建模与仿真技术研究[D].西安:西北工业大学,2006.
[18] 冯 虎,崔竹君,高 荣.摊铺机提升液压系统仿真研究[J].筑路机械与施工机械化,2016,33(12):101-105.
[19] 翟大勇,周志鸿,林嘉栋,等.基于AMESim的压路机振动液压系统仿真研究[J].液压气动与密封,2010,30(1):13-17.