基于太阳能供电的行走式智能增氧机器人研究
2018-01-17刘晓梅
张 净 沈 捷 刘晓梅
(1.江苏大学电气信息工程学院, 镇江 212013; 2.江苏科茂信息技术有限公司, 镇江 212001)
引言
随着世界性渔业资源的匮乏,我国作为水产养殖大国,在渔业生产中发挥的作用越发显著[1-4]。池塘养殖是人工营养型生态循环系统,养殖后期,大量的残余饵料、排泄物以及尸体等沉积,会造成池塘养殖水体中氨氮、亚硝酸盐等物质的浓度快速升高,再加上低水平的溶氧量,从而导致养殖生物抵抗力减弱,引发疾病[5]。溶解氧是池塘养殖的重要制约因子[6-7]。当水中溶氧量低于1 mg/L时,鱼类就会因缺氧而浮出水面,造成浮头甚至“泛塘”的现象[8]。移动机器人实用性强,可减少人工成本,因此,移动式增氧机是池塘养殖必不可少、最重要的机械设备之一[9-11]。
目前国内外常用的机械增氧机多种多样[12],不同的增氧方式优缺点不同[13],传统增氧机固定在某处或者随机移动,增氧效果不够均匀,作用范围有限,靠近增氧机处溶氧量高,鱼类就多;反之则少,导致鱼塘面积利用率降低。基于此,本文提出一种太阳能供电行走式智能增氧机器人。
1 结构设计
移动式太阳能增氧机器由太阳能电池板、叶轮、水质监测模块、超声波测距模块、水下测距模块、主控箱和浮筒组成,如图1所示。其中,主控箱包括电机、智能控制器以及蓄电池等。
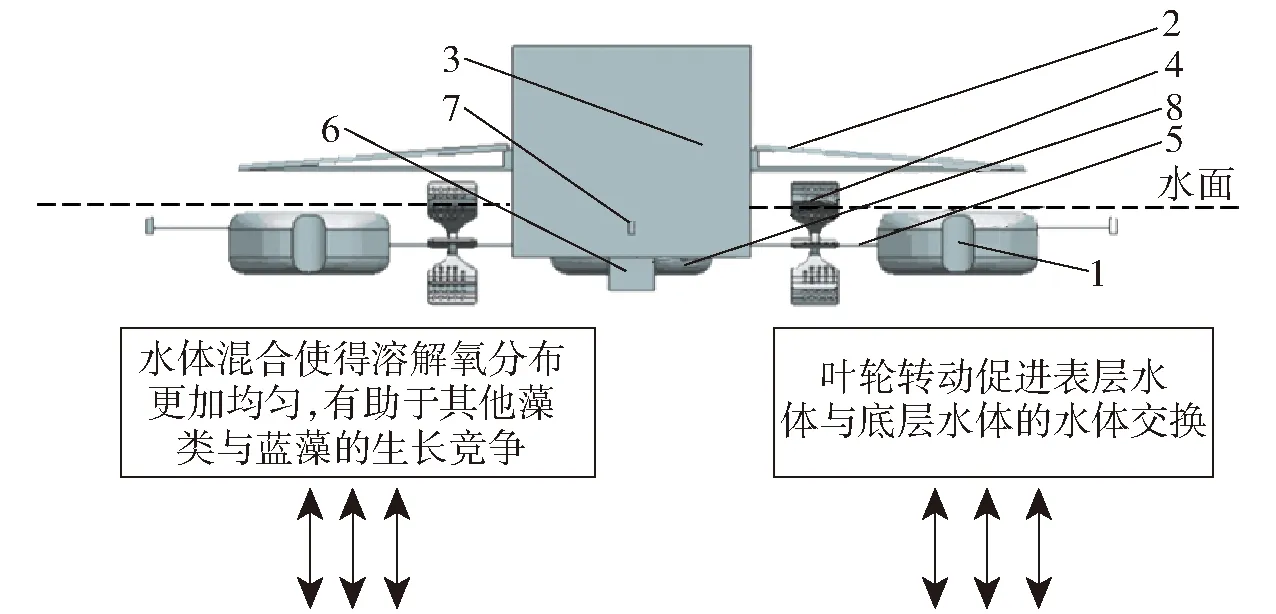
图1 装置结构示意图Fig.1 Device diagram1.浮筒 2.太阳能电池板(3块) 3.主控箱 4.叶轮 5.连接杆 6.水质监测模块 7.超声波测距模块(4个,前后左右各一个) 8.水下测距模块
装置由太阳能供电整个系统,分为手动和自动2种模式。装置要求手动操控进入安全范围,然后开启自动模式。自动模式中,装置通过避障模块智能避障行走,行走过程中叶轮将空气中的氧气压入水体进行增氧,水质监测模块实时监控溶氧量,同时嵌入式模块与整个系统进行数据交互,实现用户远程操控与查看实时数据功能。
2 硬件分析
2.1 底层控制模块
2.1.1电源模块
电源模块规定,遇到连续阴雨天气,或当装置电量低于30%时会自动报警,通知用户采用市电对蓄电池充电。
选择3块DL-18-60W型(工作电压12 V)太阳能电板,2个电池容量72 A·h的蓄电池。太阳能板采用“梯子”三面型,确保至少一块太阳能电池板能够接收到阳光。
2.1.2嵌入式模块
HF-LPB100(汉枫WiFi嵌入式模组)可以将物理设备与无线网络进行连接,再利用UART串口传输数据。在进行自动控制的基础上,装置还使用具有STA和AP 2种可自动切换的通讯状态:在无线网络完全覆盖鱼塘时,采用STA(无线终端)模式,此时用户可以在手机终端上发送指令进行远程控制增氧机工作或发送指令查看实时数据;在增氧机行走到无线网络信号差甚至没有时,通讯自动转换到AP(热点)模式,此时只能进行近距离遥控控制。
2.2 传感器模块
2.2.1防碰壁测距传感器
HC-SR04超声波测距模块可提供2~400 cm的非接触式距离感测功能,测距精度可高达3 cm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:采用IO口TRIG 触发测距,给至少10 μs高电平信号;模块自动发送8个40 kHz的方波自动检测是否有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。
(1)
式中l——测试距离
t——高电平时间v——声速
2.2.2防搁浅超声波换能器
装置采用超声波换能器为核心器件的超声波测深仪进行水下测距,防止搁浅。由于池塘底部为“弧形”,靠近池壁的地方较浅,将搁浅基数调整恰当,就可以保证在防止搁浅的同时防止机器碰壁。图2为超声波测距系统框图。
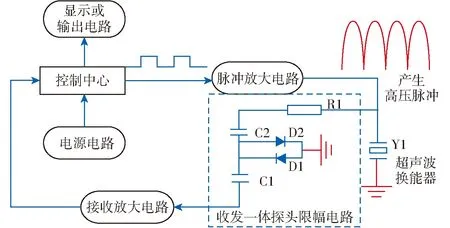
图2 超声波测距系统框图Fig.2 Block diagram of ultrasonic ranging system
2.2.3溶解氧传感器
水质监测即溶解氧的监测,采用在线溶氧检测仪测量水中溶解氧情况,测量范围:0~200.0 μg/L,精度:±1.0%。
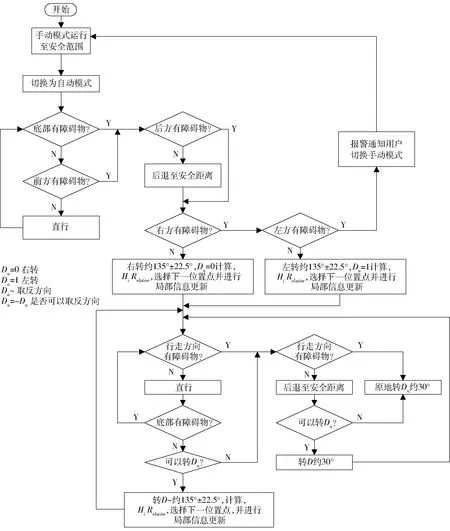
图4 “之”型程序流程图Fig.4 Flow chart of program
水质监测模块实现过程如图3所示,溶解氧传感器实时监测水中溶氧含量,数据采集器从溶解氧传感器中采集的溶氧含量数据传给嵌入式控制器,由传输层将嵌入式控制器中的数据通过通信服务器传输到服务器应用系统,同时将数据保存到数据库中,最终用户可以在PC端和WEB端查看存储的数据。当数据显示溶解氧含量低于2 mg/L时,装置会自动运行进行增氧,也可以用户手动增加在这个位置点的增氧时间。
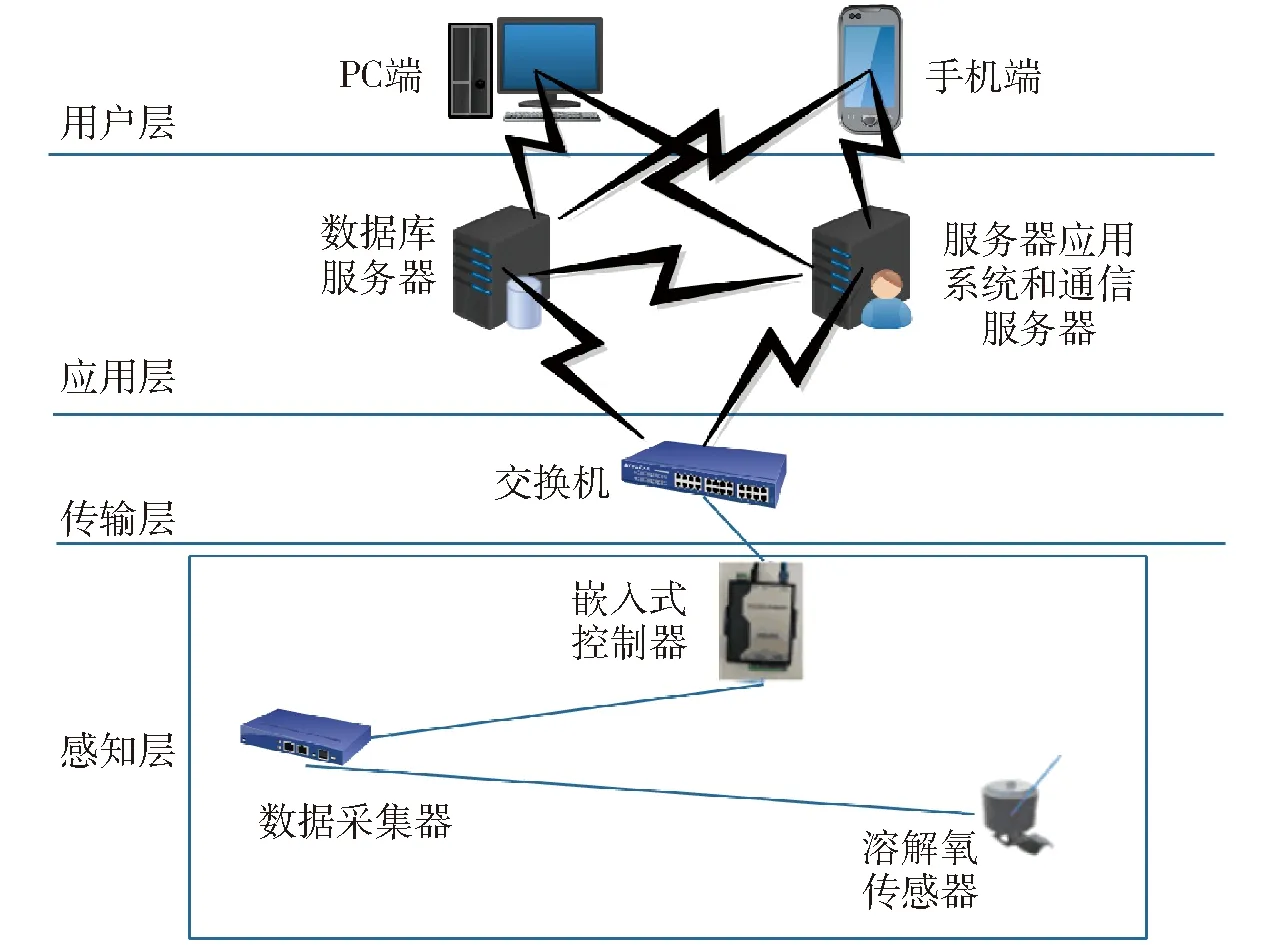
图3 水质监测模块Fig.3 Water quality monitoring module
3 系统软件设计
3.1 路径分析
机器人路径规划是指根据已知条件和限定条件,规划一条满足任务要求的安全、有效、可行的路径[14-15]。
考虑到风、浪、流、惯性力等环境的影响[16],装置的路径规划采取基于蚁群算法[17]的“之”型有限状态机模型,程序流程图如图4所示。
模型的算法如下:
(1)划分栅格。根据传感器信息将四周区域进行划分。规定所有的栅格都具有5种属性,障碍属性Flag、可选属性Enable、相邻属性Near、访问属性Visit和关联属性Relative,分为自由栅格和障碍栅格。
(2)机器k被放在位置i处,下一个目标地点为j,期望行走时间t,期望偏角θ,实际行走时间t0,行走速度v,产生偏角θt。τij(0)=τ0,指信息素,规定一个τmax。路径的起点为gstart,终点为gend。Dn方向值是Dn-1方向值取反,记为Dn=~Dn-1。当转角方向记录值Dn=0时右转135°,反之左转。
设定k的初始感觉刺激阈值A=0,高强度信息素节点控制步数P=0。
(3)根据Dn的值找出转角范围内临近的,未被访问的栅格。计算其关联性。栅格标记为1,2,…,i,…,n。
(4)找出关联性最高的为下一个位置点。如果τij<τmax,则P++,并进行感应适应操作
A=min(Amax,C(int)(X/P))
(2)
式中Amax——预先设定好的适应刺激阈值最大值
C——增长系数
X——在高强度信息素中行走的步数
再进行局部信息更新
τij=(1-ρ)τij+ρΔτij
(3)
(4)
式中Q1——常数l——已走过的栅格长度
ρ——信息素蒸发系数
检查此时位置是否为gend,若是此路径为d,否则继续找下一个位置。
(5)对比d和历史最优路径dbest,如果d用时更少且遍历范围广,则规定d为dbest。
(6)循环往复M次,直到找到最优路径。
3.2 增氧机行走的影响分析
3.2.1风动力分析
增氧机水面行走更易受到一些因素的影响,例如风和水。风对增氧机行走的影响分析如图5所示。图中Va为相对风速,θ为相对风舷角,α为风动力角,Ma为力矩。
风动力为
(5)
其中
Sa=HD
式中Sa——增氧机迎风面的面积
H——增氧机的长度
D——增氧机干舷高度
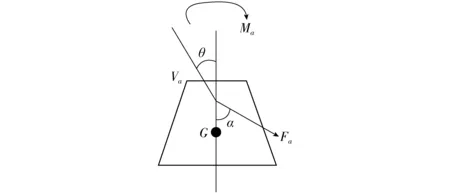
图5 风、水影响分析图Fig.5 Impact analysis of wind and water
正常天气下,取最大风速8 m/s,考虑最糟糕的情况,装置受到正橫风的影响[18],此时的风动力最大。增氧机长2 m,质量50 kg,干舷高度为0.33 m,根据式(5)算得此时的风动力Fa=0.023 5 T。经测量,此时增氧机偏角范围为±22.5°。
3.2.2行走范围分析
如图6所示,鱼塘长100 m,宽25 m,以增氧机中心点画行走路线图,在满足增氧机不碰壁,留出离鱼塘壁2 m的安全宽度条件下,得装置最小行走范围大约为23.17%。
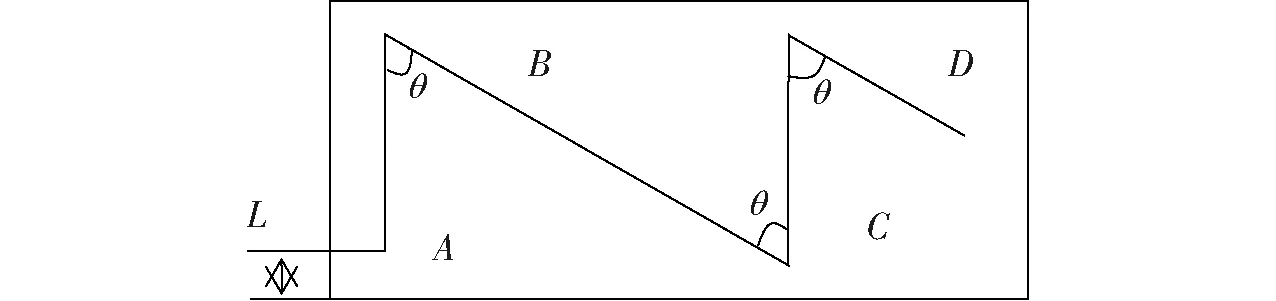
图6 行走分析图Fig.6 Diagram of walking analysis
在同等时间同等条件下开启由钢丝线引导、功率同为750 W的传统增氧机(型号YL),其行走增氧范围仅7.77%,本装置遍历范围高于传统增氧机15.4%。
4 实验与结果分析
参照文献[19],分别在晴天和阴雨天气进行了2次实验。
4.1 同比传统增氧机增氧效果
实验于2016年8月18日在实验基地进行,天气晴朗,气温24℃,水温23℃,东南风3~4级。实验在长100 m,宽25 m的鱼塘,分为4个测试点,测点1、测点2、测点3、测点4,分别布署在实验鱼塘内的东南西北4个方向随机各选取一个组,每组分别在0.4 m和0.8 m处进行增氧。开启增氧机40 min,每10 min记录一次数据,每个点不同深度溶氧量的平均值如表1所示。
在同等时间同等条件下开启由钢丝线引导、同为750 W功率、YL型号的传统增氧机,增氧效果如表2所示。
实验结果:测点1在水深0.4 m处本装置增氧后溶氧量提升至7.04 mg/L,传统增氧机遍历达不到测点1处,溶氧量仅靠增氧波及提高至5.37 mg/L,本装置同比传统增氧机增氧量提高了1.65 mg/L;另取测点2在传统增氧机增氧范围内,水深0.8 m处本装置提高溶氧量至5.17 mg/L,传统增氧机提高溶氧量至4.49 mg/L,本装置同比传统增氧机增氧量提高了0.68 mg/L。
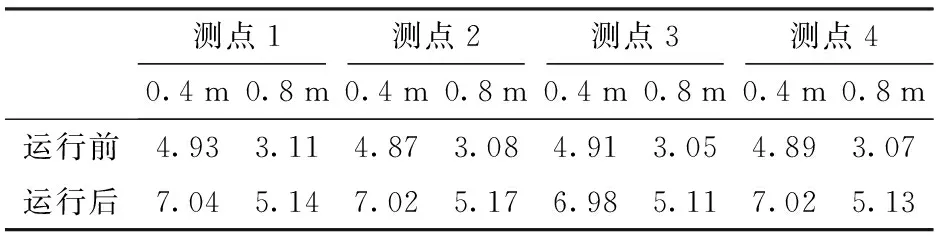
表1 溶氧量测量结果(本装置增氧机)Tab.1 Dissolved oxygen measurement results mg/L
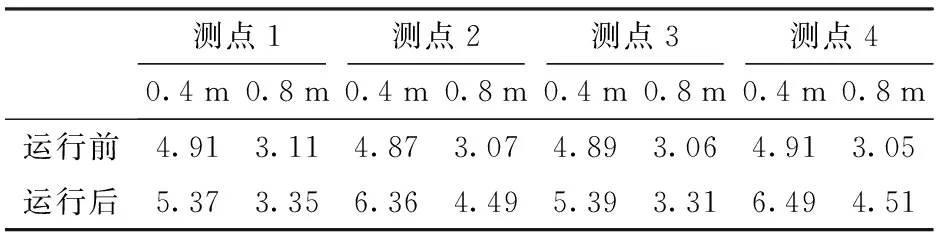
表2 溶氧量测量结果(传统增氧机)Tab.2 Oxygen content measurement results mg/L
4.2 对比无增氧机鱼塘溶氧量变化
实验于2016年8月21日在实验基地进行(图7)。
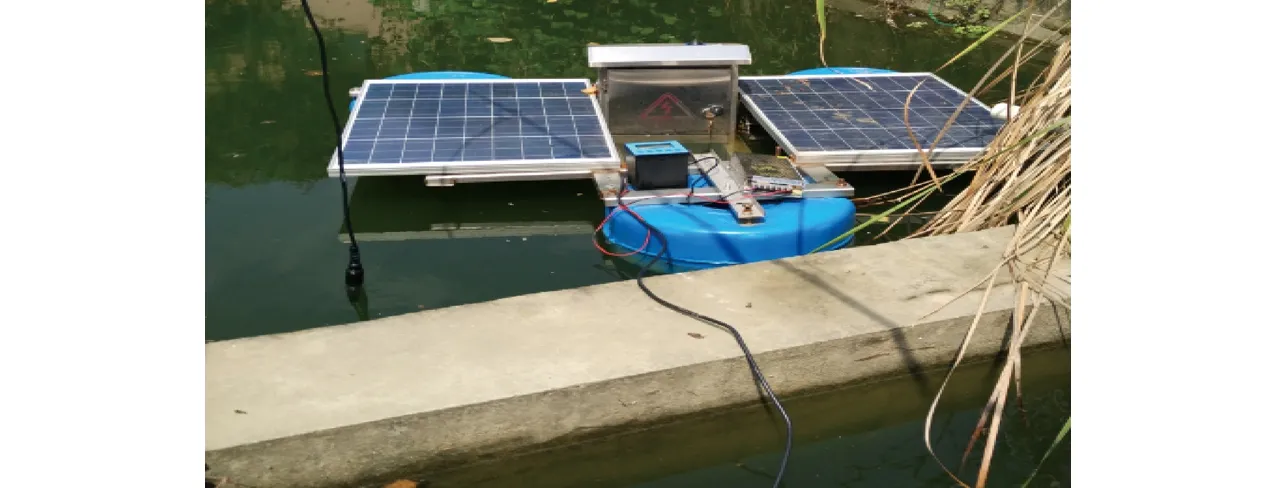
图7 实验现场Fig.7 Test site
参照文献[20],阴雨天气需要增加增氧机的开启时间以确保鱼塘的氧气含量足够。当天09:00—15:00,时有下雨,气温变化范围为24~30℃,微风。水温变化范围为23~27℃。实验在2个长100 m,宽25 m的鱼塘的同一个位置测量,放置本装置增氧机的为实验组,没有放置增氧机的为对照组。每2 h测试一次,每次增氧机开启30 min。
实验结果:同位置处,实验组对比对照组,使用本装置后溶氧量提高效果明显,尤其在中午11:00时测点1溶氧量提升至7.04 mg/L,此时对照组溶氧量为6.21 mg/L,实验组比对照组溶氧量提高0.83 mg/L,如图8所示。
4.3 本装置鱼塘溶氧量的日变化
同天,第3次实验并行,在长100 m,宽25 m的实验鱼塘内随机选一个测试点。09:00开始测试,前0.5 h测溶氧量4次,11:00之后每2 h测试一次,每次增氧机开启30 min,分别测量0.4 m和0.8 m的日溶氧量变化如图9所示。

图8 测试点溶氧量日变化曲线Fig.8 Diurnal variation curves of dissolved oxygen for test points

图9 测试点不同深度的溶氧量日变化Fig.9 Daily variation of dissolved oxygen at different depths of test point
增氧机运行时间为09:00—15:00,由图9可知,增氧机对水体上下层均有增氧,测试点在09:05时由增氧机行走至此,提高溶氧量至6.98 mg/L,提高了2.01 mg/L。
参照文献[20]的行业标准
(6)
(7)
式中KLa——任意水温下的氧质量转移系数,h-1
C1、C2——t1、t2时的溶氧量,mg/L
t1、t2——C1、C2的读数时间,min
Cs——实验用水饱和溶氧量,mg/L
T——实验水温,℃
Qs——增氧能力,kg/h
V——实验鱼塘体积
取测点1,11:00时氧含量为6.99 mg/L、11:30时氧含量为7.05 mg/L,此时水温为23℃,饱和溶解氧为8.41 mg/L,计算可得本增氧机增氧能力为1.69 kg/h。
通过上述数据对比可见,本装置大大改善了鱼溏溶氧量,达到了设计要求。
5 结论
(1)装置前后左右各安装了4个超声波传感器,以及底部安装超声波换能器,可以防止装置碰撞及搁浅。
(2)增氧机使用2个工作电压12 V、工作电流32 A的电机(pds-600型)为直径42 cm的叶轮提供增氧动力。太阳能电板9.6 h可以为2个72 A·h的蓄电池(6-QW-72(700)-L型)充满电,由蓄电池向电机供电持续2.3 h,可满足需求。
(3)机器人智能行走增氧效果提升明显,溶氧量较低时,平均提高溶氧量2.0 mg/L。
(4)使用水下探测器与超声波避障的结合,确保了装置能完成遍历,完成度至少可达到23.17%。
1 张小康,许肖梅,彭阳明,等.集中式深水网箱鱼群活动状态远程监测系统[J/OL].农业机械学报,2012,43(6):178-182.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120632&flag=1. DOI:10.6041/j.issn.1000-1298.2012.06.032.
ZHANG Xiaokang, XU Xiaomei,PENG Yangming, et al. Centralized remote monitoring system for bred fish in offshore aquaculture cage [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012,43(6): 178-182. (in Chinese)
2 曾洋泱,向欢,刘新庭.水产养殖水质监控技术研究现状及发展趋势[J].渔业现代化,2013,40(1):40-44.
3 美国科学院国家研究委员会.鱼类与甲壳类营养需要[M].麦康森,李鹏,赵建民,等,译.北京:科学出版社,2015.
4 王志勇,江涛,王喜,等.标准化池塘养殖自动投饵系统设计[J].农业机械学报,2010,41(8):77-80.
WANG Zhiyong, JIANG Tao,WANG Xi, et al. Design of automatic feeding system in standardization pond culture [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010,41(8): 77-80.(in Chinese)
5 刘文珍,徐节华,欧阳敏.淡水池塘养殖增氧技术及设备的研究现状与发展趋势[J].江西水产科技,2015(4):41-45.
6 赵建,朱松明,叶章颖,等.循环水养殖游泳型鱼类摄食活动强度评估方法研究[J/OL].农业机械学报,2016,47(8):288-293.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160838&flag=1. DOI:10.6041/j.issn.1000-1298.2016.08.038.
ZHAO Jian, ZHU Songming, YE Zhangying, et al.Assessing method for feeding activity of swimming fishes in RAS [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(8): 288-293. (in Chinese)
7 蒋建明,史国栋,赵德安,等.基于Zigbee通信的节能型混合式机械增氧系统[J/OL].农业机械学报,2013,44(10):242-246.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20131039&flag=1. DOI:10.6041/j.issn.1000-1298.2013.10.039.
JIANG Jianming, SHI Guodong, ZHAO De’an et al. Energy-efficient hybrid mechanical aeration system based on Zigbee communication [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(10): 242-246. (in Chinese)
8 袁丽.鱼类浮头防治技术探析[J].农技服务,2015(1):164-165.
9 顾海涛,王逸清.我国池塘增氧技术现状与发展趋势[J].渔业现代化,2014,41(5): 65-68.
10 高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7):25-33.
GAO Guoqin,LI Ming.Navigating path recognition for greenhouse mobile robot based on K-means algorithm[J].Transactions of the CSAE,2014,30(7):25-33.(in Chinese)
11 贾士伟,李军民,邱权,等.基于激光测距仪的温室机器人道路边缘检测与路径导航[J].农业工程学报,2014,31(13):39-44.
JIA Shiwei,LI Junmin,QIU Quan,et al.A new corridor edge detection and navigation algorithm for greenhouse mobile robots based on laser scanner[J]. Transactions of the CSAE, 2014,31(13):39-44.(in Chinese)
12 张祝利,顾海涛,何雅萍,等.增氧机池塘增氧效果试验的研究[J].渔业现代化,2012,39(2):64-68.
13 管崇武,刘晃,宋红桥,等.涌浪机在对虾养殖中的增氧作用[J].农业工程学报,2012,28(9):208-212.
GUAN Chongwu,LIU Huang,SONG Hongqiao, et al.Oxygenation effect of wave aerator on shrimp culture[J]. Transactions of the CSAE, 2012,28(9):208-212.(in Chinese)
14 柴剑.智能扫地机器人技术的研究与实现[D].西安:西安电子科技大学,2013.
CHAI Jian.Research and intelligent sweeping robot technology [D].Xi’an: Xi’an University of Electronic Science and Technology, 2013. (in Chinese)
15 李伟.移动机器人路径规划技术的现状与发展趋势[J].数字化用户,2013(22):216.
16 陈鹏,李彩虹.移动机器人混合式全遍历覆盖路径规划算法[J].山东理工大学学报,2013,27(5):22-27.
CHEN Peng,LI Caihong. A hybrid algorithm of complete coverage path planning for mobile robot [J]. Journal of Shandong University of Technology, 2013,27(5):22-27. (in Chinese)
17 WANG Zhongli,LIU Yunhui. Pose control of a lake surface cleaning robot using backstepping and polar coordinates[J]. Advanced Robotics,2010,24:537-557.
18 邢政.风对船舶运动的影响及估算[J].航海,2015(4): 38-40.
XING Zheng.Effects of wind on ship motion and its estimation [J]. Marine Technology, 2015 (4): 38-40. (in Chinese)
19 康安娜. 浅析增氧机使用原则与池塘溶解氧变动规律的关系[J].黑龙江水产,2012(6):34-36.
20 SC/T 6009—1999 增氧机增氧能力试验方法[S].1999.
