基于PID控制器的滚球控制系统设计与制作
2018-01-15李世甲李海龙蔺瑞英
李世甲,万 超,李海龙,蔺瑞英
0 引言
2017年全国大学生电子设计竞赛本科组B题要求设计制作一滚球控制系统,在边长为65 cm光滑正方形平板上均匀分布9个外径3 cm的圆形区域,其编号为1-9号(从左至右依次排列),如图1所示。系统通过控制平板的倾斜,使直径不大于2.5 cm的小球能够按照指定的要求在平板上完成动作,并从动作开始计时且显示时间。要实现的基本要求如下:(1)在15 s内,控制小球从区域1进入区域5,在区域5停留不少于2 s.(2)控制小球从区域1进入区域4,在区域4停留不少于2 s,然后再进入区域5,小球在区域5停留不少于2 s.完成以上两个动作总时间不超过20 s.(3)在30 s内,控制小球从区域1进入区域9,且在区域9停留不少于2 s.
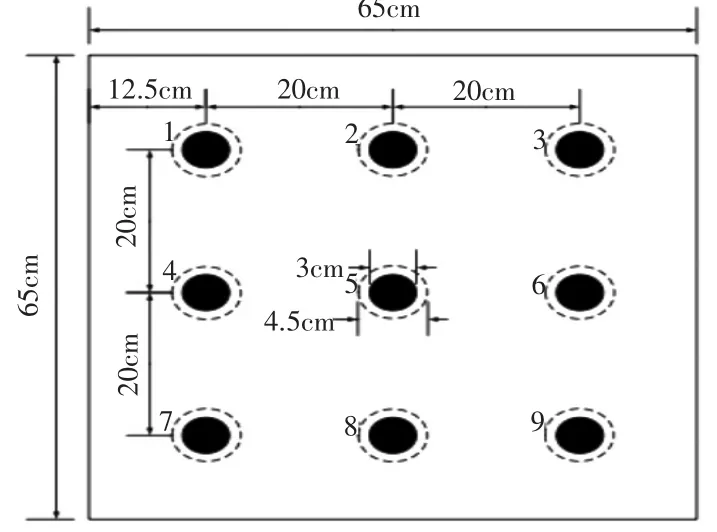
图1 平板位置分布示意图
本文研究的滚球控制系统在实现竞赛题目要求的同时,可用于《机械电子工程专业导论》《机械控制工程基础》《单片机原理及应用》等课程的实验教学,或作为学生课外科技作品制作范例,提升学生专业知识学习兴趣。
1 滚球控制系统设计
1.1 系统结构设计
根据要求,测控系统要使小球按照一定规律运动。本文通过切换6个启动、复位按键实现3个题目要求的动作并在LCD液晶屏显示动作时间。完成相应的控制任务,关键在于反馈信息的准确性和对步进电机的控制,为此将系统分为五个模块,系统整体方案框如图2所示。
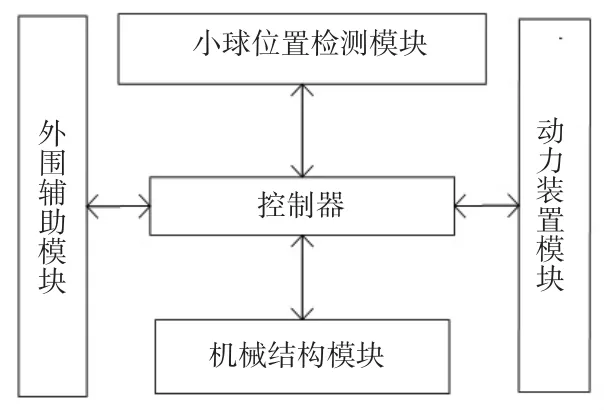
图2 系统整体框图
1.2 控制器模块
控制器是整个控制系统的核心,承载着执行控制算法,实现控制功能的作用。对于89C52单片机,原理简单,成本低,综合考虑后选择其作为本控制系统控制器模块[1]。
1.3 位置检测模块
由于购买的Chihod红外线光电传感器,最大测量范围为30 cm,经测试及计算,其布置方式如图3所示。S2和区域1的中心距距离为4 cm.
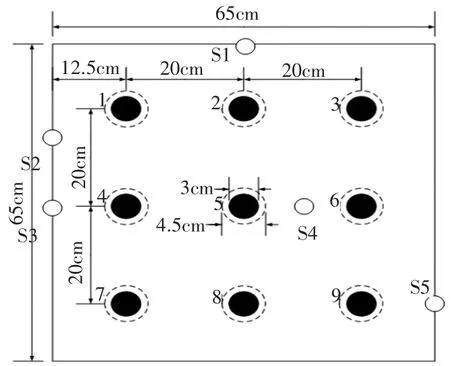
图3 传感器布置图
1.4 动力装置
动力装置作为本控制系统中的执行机构,其提供的动力是否充足、可调性是否优良直接决定能否完成控制任务和控制质量的高低。在考虑了成本、体积、时效性等因素的基础上选择了28BYJ-48型步进电机,利用步进电机的正反转控制木板翻转。
1.5 外围辅助模块
本系统中的外围辅助模块,主要是指与对滚球的控制不起直接作用的功能调用模块(按键)、显示模块(LCD1602液晶)、声光提示模块、数字式可调电源。
1.6 机械结构设计
系统的机械结构设计如图4所示。平板1中间放置于万向节3之上,万向节3通过立柱4与底盘7相连接,平板1可在万向节3之上360°摆动;电机5、6安装在立柱上,同步带2两端系在平板1的孔内,并通过带轮及联轴器与电机5、6末端相连,通过电机的正反转,可调节平板1的左右倾斜,通过电机5、6的联动,可实现平板1的45°倾斜。光电模块8安装在平板1上,检测小球通过的时间,并向控制系统反馈,从而改变电机转速,用以控制小球速度。通过调节电机的转速[2],实现平板的翻转,通过平板的翻转速度及角度,使小球按预设轨道运动,实现不同运动轨迹。制作的滚球控制系统实物如图5所示。
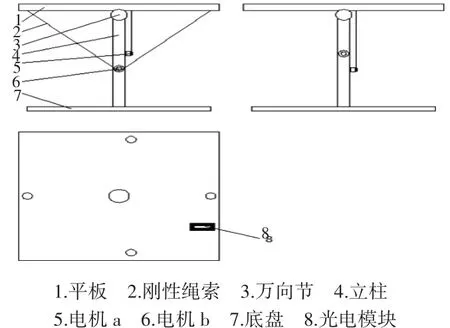
图4 系统机械结构示意图
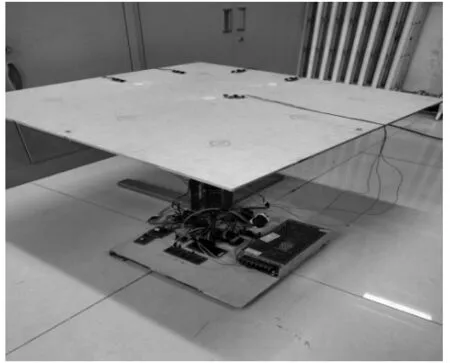
图5 滚球控制系统实物图
2 控制策略
2.1 PID控制
PID控制是将偏差的比例、积分和微分三者通过组合构成控制量。比例调节规律依据“偏差的大小”来动作,它的输出变化量与输人偏差成比例,调节平稳,作用及时,能有效地克服各种干扰,是最基本的调节规律,它的缺点是不能消除余差,因此只能用于那些对被调参数精度要求不高的场合。常用比例度Kp表示比例调节作用的强弱。Kp越小,表示比例增益越大,比例调节作用越强。同时,Kp越小,被调参数余差也越小,但调节系统稳定性下降。常规的PID控制系统原理框图如图6所示[3]。

图6 PID控制系统原理图
2.2 控制系统实现
根据以上要求和PID原理,设计的滚球控制系统各部分的关系如图7所示。单片机资源分配如图8所示,LCD接线如图9所示。LCD1602引脚连接方式如下:数据位D0~D7分别接单片机p0~p7,数据处理位 RS、RW、E 分别接单片机 p2.5~2.7,引脚 1(GND)和 16(K)接地,引脚 2(VCC)和 15(A)接电源正极。
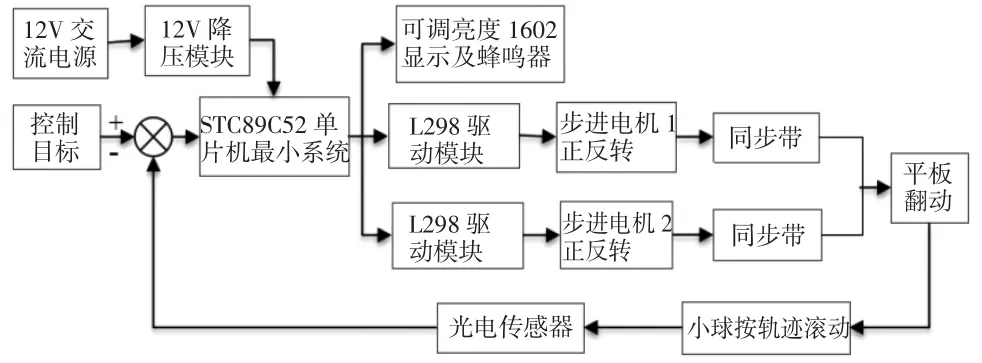
图7 控制系统示意图
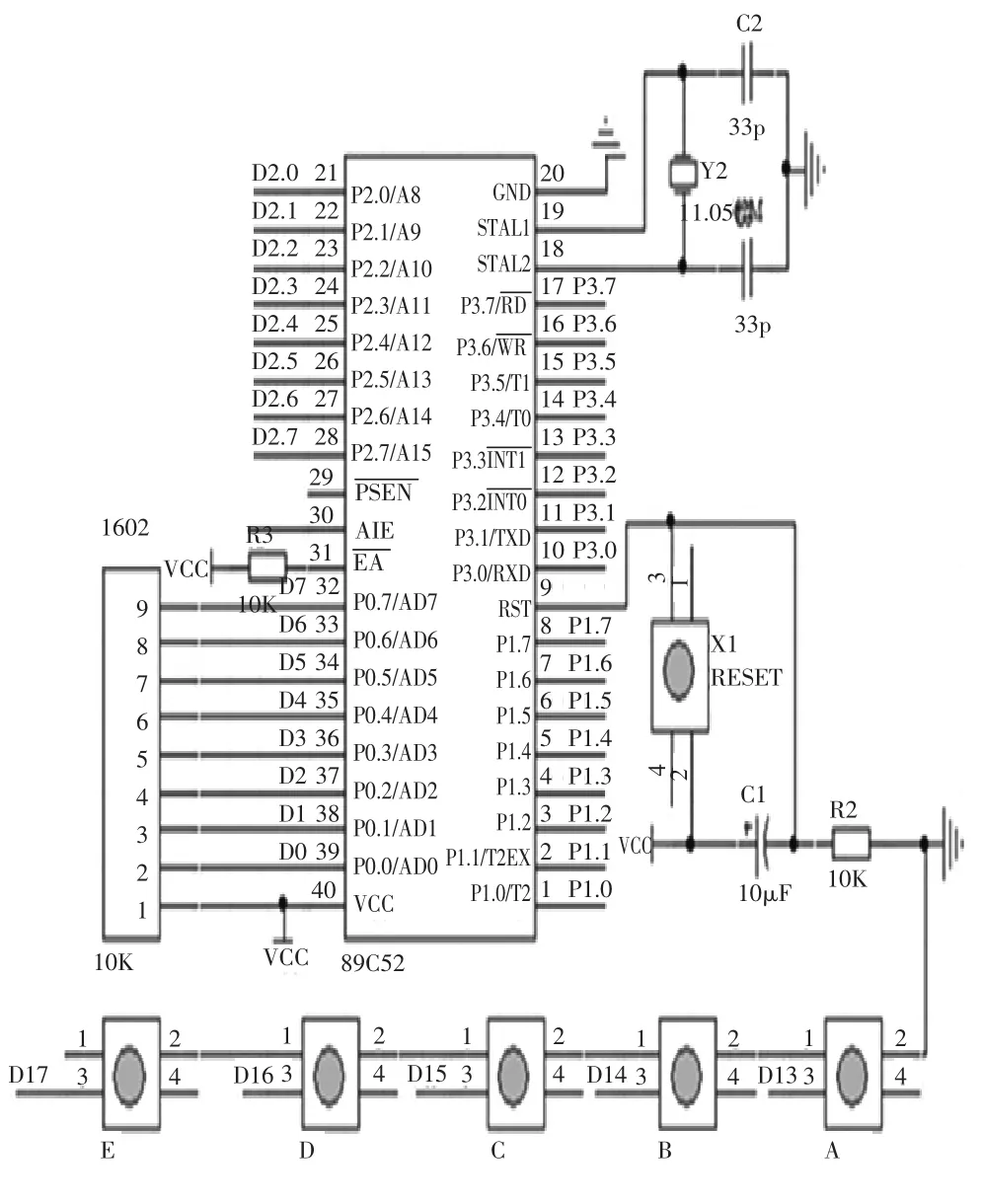
图8 单片机资源分配图
3 结论
所设计的控制系统经测试,可在规定时间内完成小球从1区进入5区;从1区进入4区,停留后进入5区;小球从1区进入9区并停留。但是,误差及稳定性较差,原因是:(1)滚球控制系统机械结构受制作工艺所限,其刚度及稳定性较差;(2)采用的控制方法过于简单,控制不够精确;(3)板材及小球的材质匹配不够优化。
[1]朱玉红,林小军.单片机原理与接口技术[M].北京:机械工业出版社,2013.
[2]汤蕴璆.电机学[M].5版.北京:机械工业出版社,2014.
[3]彭珍瑞,董海棠.控制工程基础[M].2版.北京:高等教育出版社,2015.
