城市机动车污染排放的时空预测与分布
2018-01-10肖中新李兵兵于尧葛颖恩
肖中新+李兵兵+于尧+葛颖恩


摘要:鉴于中国城市机动车排放的NOx,CO和PM类尾气对城市大气造成的污染日趋严重,通过监测道路低空机动车排放数据,对机动车污染排放随交通参数变化的规律进行剖析。针对不同车型,提出机动车污染排放因子模型。对模型进行标定和试验验证。所得结果能有效反映路段车辆的真实排放情况。该方法为实时掌握机动车污染排放的时空分布规律与特征,制定科学的、精细化的交通污染防治措施提供依据。
关键词: 机动车排放; 时空预测; 排放因子
中图分类号: X734.2 文献标志码: A
Abstract: In view of the fact that atmospheric pollution in Chinese cities caused by NOx, CO and PMemissions of vehicles is becoming more and more serious, the variation law of vehicle emission versus traffic parameters is analyzed by monitoring the near-road vehicle emission data. Pollution emission factor models for various types of vehicles are proposed. The models are calibrated and verified by tests. The test results can reflect the real emissions of vehicles in a road section. The method can provide support for finding the space-time distribution laws and characteristics in real time and formulating the scientific and refined measures to prevent and control traffic pollution.
Key words: vehicle emission; space-time predicting; emission factor
引 言
隨着我国城镇化进程的加快,机动车尾气已逐渐成为氮氧化物(NOx)、碳氢化合物(HC)、挥发性有机物(VOC)、一氧化碳(CO)以及颗粒物(PM)等城市大气污染的主要来源之一。[1]同时,机动车行驶过程中产生的尾气污染对城市居民健康的影响也已逐渐引起人们的关注。路段近地区域(垂向)以及路侧往往是是机动车尾气污染的“重灾区”。对“呼吸带”高度的路段区域大气进行定量监测,获得机动车排放污染数据,对剖析机动车污染排放近地区域的分布,制定环保、交通管控对策,实现城市环境的可持续发展具有重要的意义。
目前,欧美一些国家陆续开展了对道路低空大气污染模型的研究,较为著名的有CALINE4,AERMOD和CAL3QHCR等模型[2]。美国环保署(EPA)将AERMOD模型和CAL3QHCR模型作为分析近地区域颗粒物的模型。目前,我国对道路低空范围机动车污染排放的研究较少,且研究多采用国外较为成熟的污染排放模型。这存在两方面的不足:(1)首先是我国机动车污染排放清单与欧美国家有差异[2-4]。我国汽柴油标准和车辆性能都与发达国家不同,因此无论在排放污染因子的确定或是排放模型的系数标定上都有很大区别。即使采用美国提出的更适用于我国道路交通条件的IVE模型[5],也需要针对我国不同省份或道路条件重新进行模型的构建。(2)道路机动车尾气排放模型的构建往往是以机动车的平均行驶速度为依据的,而在上述较为成熟的模型中平均速度值来源于欧美国家驾驶员的驾驶习惯(与我国驾驶员的差异明显),因此采用这类模型无法得到我国道路交通排放的实际情况。
我国环保部2012年颁布了新版的《环境空气质量标准》[6],这一标准在2016年全面施行,对我国城市大气质量和监测设备等提出了更加严格的要求。《环境影响评价技术导则 大气环境》[7]和《2016中国机动车环境管理年报》[1]中均提出了针对机动车污染防治的若干对策和建议。然而,我国还未能完成系统性的、长效的道路机动车污染排放模型的搭建。因此,本文考虑我国道路实际交通情况,以合肥市某主干路为研究对象,提出道路低空范围的机动车尾气排放模型,并对道路低空污染的变化规律进行深入剖析。
1 试验方案设计
道路交通流的构成类型和特点直接影响着各种污染物的排放总量,道路的地理分布、风向、气温、季节等对污染排放的影响亦不可忽视。本文选取的试验条件为:晴朗天气,平均温度20℃,湿度71%,风力小于1.5 m/s。在合肥市某双向8车道主干路设置污染物监测点,监测点高度设置为4 m,采集数据间隔为1 h。
2 数据分析
2.1 交通参数分析
对试验路段交通流量进行调查,调查时段选为07:00—20:00,结果见图1。
由图1可知,所调查路段交通流量时间变化特征明显,平均车流率为309辆/h,且日变化特征相似,具有早高峰、午高峰、下班高峰及晚高峰特征。早高峰、午高峰和晚高峰的出现时段分别为8:00—9:00,12:00—13:00和19:00—20:00,且17:00之后道路车流率明显上升,也反映了该路段不仅仅面向通勤需求。
图2为道路车流率与车速的关系曲线。从拟合曲线可以看出,车辆平均行驶速度与车流率成二次关系。当车流率低于260辆/h时,车速越快,单位时间内通过该路段的车辆数就越多;但随着车流率的增大,该道路趋于饱和,车辆平均行驶速度出现明显下降。endprint
2.2 机动车排放污染变化规律
机动车排放的主要污染物包括NOx,CO和SO2等。采用大气污染自动监测车对实验路段路侧NOx(主要包括NO和NO2)、SO2、可吸入颗粒物(PM10和PM2.5)以及CO等数据类别进行时间质量浓度的分析。
2.2.1 NOx时空变化规律
图3为工作日期间监测路段低空NOx,NO2,NO的平均质量浓度变化曲线。
从图3中可以看出,道路污染物中NOx质量浓度随时间波动的特征较为相似,这说明道路上空NOx的来源类型及污染源排放比较稳定,规律性较强。NOx质量浓度在一天中有3个高峰时段,第1个高峰时段为8:00—9:00,第2个高峰时段为15:00—16:00,第3个高峰时段为20:00—21:00。其中早高峰时段NOx质量浓度最高,下午时段NOx质量浓度最低。一天中的4:00—5:00和13:00—14:00为NOx质量浓度的低谷时段。
2.2.2 SO2时空变化规律
图4为工作日期间监测路段低空SO2质量浓度随时间变化的曲线。由图4可知,SO2质量浓度变化不存在明显的、周期性的峰值,但依旧存在一定的积累特性,从侧面反映了空气中SO2的产生原因较为复杂。
2.2.3 PM10和PM2.5时空变化规律
PM10质量浓度和PM2.5质量浓度是衡量大气污染水平的重要指标。监测路段实测PM10和PM2.5质量浓度随时间的变化见图5。由图5可知:PM10和PM2.5均随时间的变化表现出较强的规律性,且两者波动规律极为相似;PM2.5质量浓度变化较PM10的质量浓度变化更加平缓,其高峰时段约为9:00—10:00,17:00—18:00,0:00—1:00,比NOx質量浓度的峰谷滞后约1.5 h。
图5 监测路段PM10和PM2.5质量浓度随时间的变化
2.2.4 CO时空分布规律
CO是烃燃料燃烧的中间产物,主要是由于烃在机动车内燃机局部缺氧或低温条件下不能完全燃烧而产生的,混在内燃机废气中排出。当汽车负重过大、行驶较慢或空挡运转时,燃料不能充分燃烧,废气中CO含量就会明显增加。图6为CO质量浓度随时间变化的曲线。总体来看,CO质量浓度较为稳定,由于大气扩散条件不利,一段时间内CO质量浓度具有小幅度的“跃升”现象。
3 模型构建与分析
由于试验路段环境较为封闭,下垫面较为同质,为简化分析,假设该监测路段上空污染物的变化皆源于该路段机动车的排放。因此,该路段空气污染物含量为空气中固有污染物量P0与车辆尾气排放量Pe之和:Pair=P0+Pe
(1)Pe为可变排放量,因为当前道路污染的变化全部是由机动车尾气排放导致的。此外,设置车型为i的机动车排放污染物j的系数为Cij,因此该类型车的污染物j的总排放量可表示为Eij=CijQi
(2)其中,Qi为i型车的车流量,可从监测路段的交通流量视频中得到,则所有机动车污染物j的总排放量可表示为Ej=i(CijQi)
(3) 参照国际机动车污染物排放形式,构建以下不同类型车的排放范式(其中v为平均车速,l,p,b,α,β为待标定系数):
小轿车(包含私家车和出租车)排放率为Ecar=p1v2+p2v+p3
(4)轻型商务车(货车)LGV(light goods vehicle)排放率为ELGV=l1v2+l2v+l3
(5)公交车(客车)排放率为Ebus=b1v-b2
(6)则小轿车、轻型商务车、公交车排放系数向量为p1,p2,p3,l1,l2,l3,b1,b2T,总排放率为E=Fp1,p2,p3,l1,l2,l3,b1,b2。
目标函数设为max ρE,O,其中:O为观测污染物浓度值;ρ(E,O)为E与O间的皮尔逊相关系数。根据机动车污染物排放特性与车速间的关系,可知:p1,l1,b2>0;p2,l2<0;0
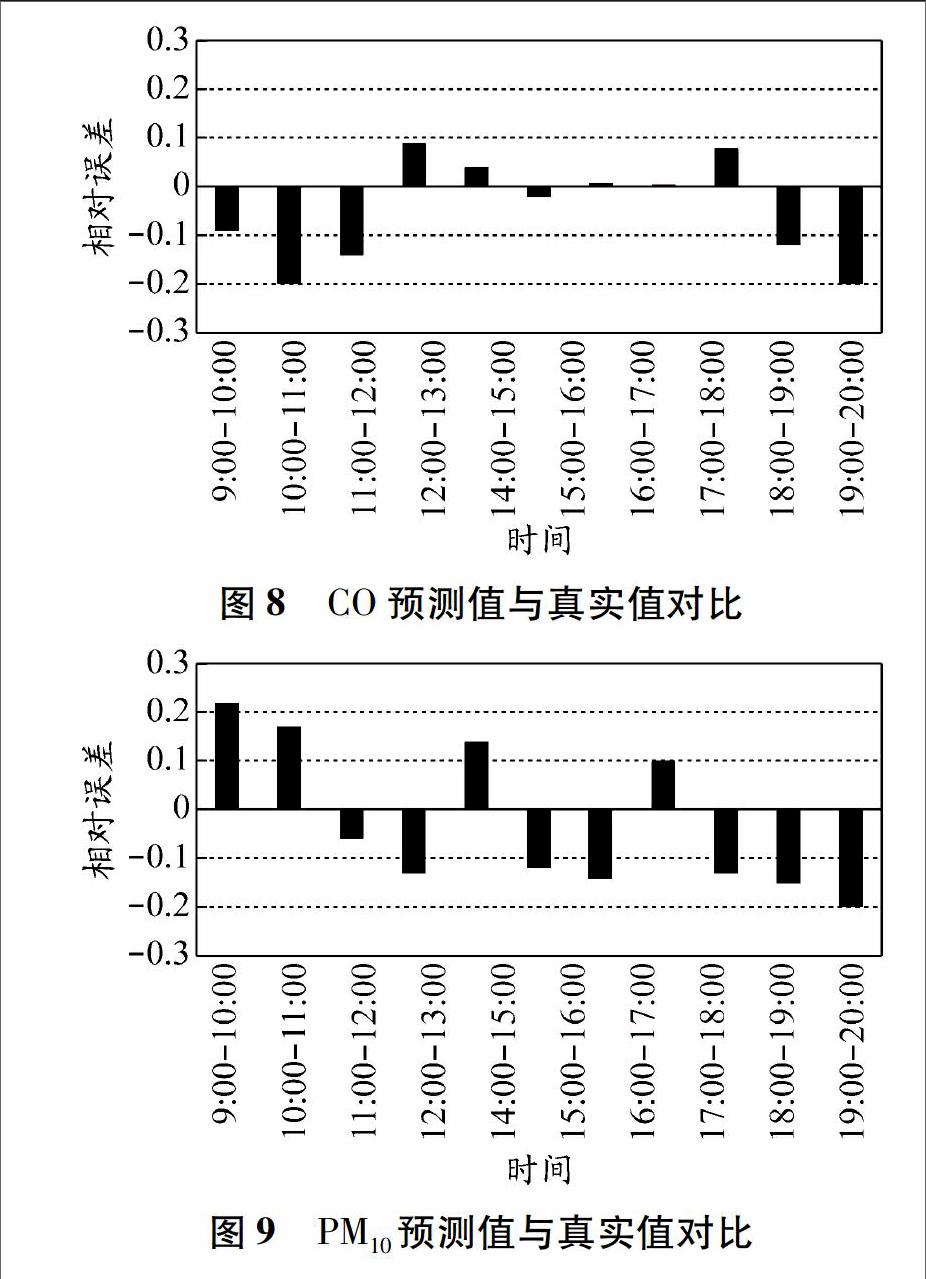
根据表1和2所得结果对预测值进行检验。由图7可知,由NOx排放模型所得预测值能够较好地反映路段NOx的真实排放,准确率达85%以上。根据图8可知,由CO排放模型所得预测值与实际检测值误差在20%以内。基于合肥市道路条件实际情况,对PM10排放因子进行标定(见表3),模型预测误差低于22%(见图9)。
4 结 论
选取合肥市某主干道为研究对象,对机动车排放出的NOx,CO,SO2,PM2.5和PM10等的质量浓度的时空分布规律进行了分析,发现NOx,PM2.5和PM10的质量浓度具有较强的周期变化特质,而SO2和CO的质量浓度未呈现显著的周期波动性。在此基础上,提出机动车污染物排放模型,并依据前期尾气排放实测数据,进行了排放因子的再标定。实测证明所得排放模型可较为准确地反映实际交通排放情况。由于受到路段交通流监测方法和时间的限制,下一步将采用连续长周期监测数据对模型进行进一步修正,以提高模型应用的精确性。endprint
参考文献:
[1] 中华人民共和国环境保护部. 2016中国机动车环境管理年报[R]. 中国: 环境保护部, 2016.
[2] LIU Haobing, WANG Yuqin, CHEN Xiaohong, et al. Vehicle emission and near-road air quality modeling in Shanghai, China, based on taxi GPS data and MOVES revised emission inventory[J]. Transportation Research Board, 2013, 2340: 33-48.
[3] WANG Haikun, CHEN Changhong, HUANG Cheng, et al. On-road vehicle emission inventory and its uncertainty analysis for Shanghai, China[J]. Science of the Total Environment, 2008, 398(1/2/3): 60-67.
[4] SINGER B C, HARLEY R A. A fuel-based motor vehicle emission inventory[J]. Journal of the Air & Waste Management Association, 1996, 46(6): 581-593.
[5] 馮晓, 王婷丽, 赵琦. 基于IVE模型的重庆市主城区机动车排放清单研究[J]. 重庆交通大学学报(自然科学版), 2014, 33(2): 135-137.
[6] 中华人民共和国环境保护部. 环境空气质量标准 第5-7部分: GB 3095—2012[S]. 中国: 环保部, 2012: 1.
[7] 中华人民共和国环境保护部. 环境影响评价技术导则 大气环境 第6-9部分: HJ 2.2-2008[S]. 中国: 环保部, 2008: 12.
[8] NTZIACHRISTOS L, GKATZOFLIAS D, KOURIDIS C, et al. COPERT: a European road transport emission inventory model[M]. Berlin:Springer, 2009: 491-504.
(编辑 贾裙平)endprint
