图解世界载人航天发展史(二十一)
2018-01-10邸乃庸
文/ 邸乃庸
图解世界载人航天发展史(二十一)
文/ 邸乃庸
三、交会对接

现代载人航天已经与交会对接融合在一起,可以说没有交会对接就没有载人航天的发展。交会对接在两个航天器之间进行,一个是被动的,称为目标航天器,一个是主动的,称为追踪航天器。交会对接分交会和对接两个过程,先实施交会,靠近后再实施对接。
交会时要求追踪航天器和目标航天器在同一个轨道平面内飞行。图为联盟号飞船正在接近国际空间站,准备实施对接。

两个航天器开始对接程序时,追踪航天器加速向目标航天器靠拢,两个航天器的对接机构接触、撞击、拉紧、锁定,交会对接过程即告全部完成。经过对接面的密封检查,确认密封性良好后,即可开启舱门,航天员进入目标航天器。图为航天飞机与国际空间站成功对接。
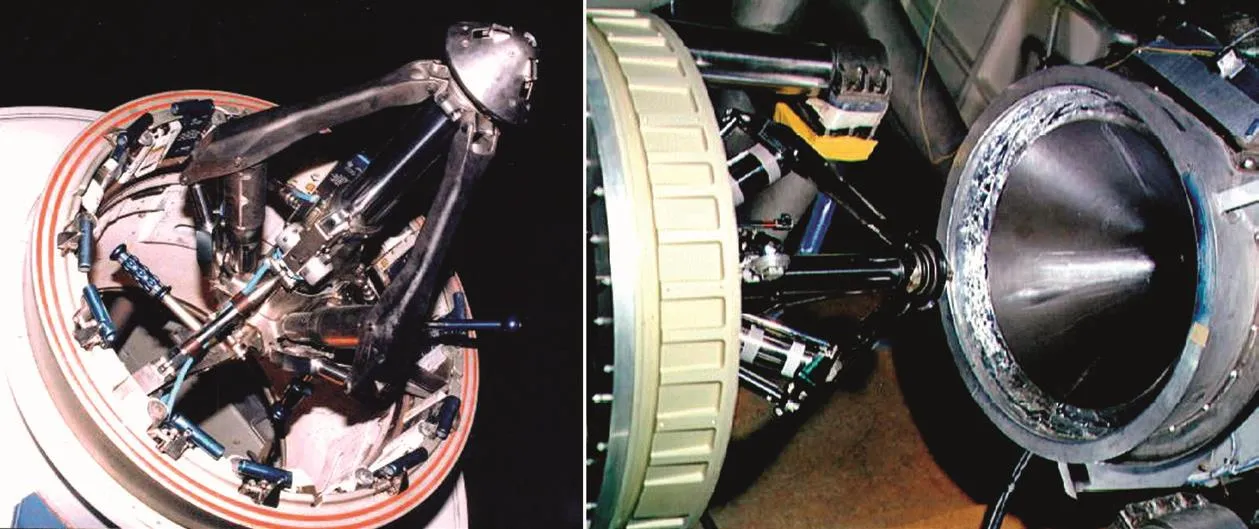
在载人航天器中首先进行交会对接飞行的是阿波罗号飞船登月工程,其指令舱和登月舱需要在月球轨道上进行对接—分离—再对接的操作过程,使用的是销—锥式对接机构。指令舱上安装的销组件(左图),这是主动部分;登月舱上安装的锥组件(右图),这是被动部分,在轨道上等待指令舱来对接。
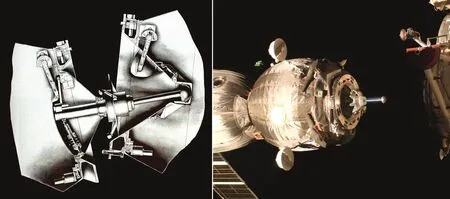
俄罗斯的联盟号飞船和进步号货运飞船一直使用杆—锥式对接机构。杆组件(左图中的左半部分)安装在追踪航天器上,能够由螺旋杆转动而伸缩,中间还设置了对中滑动装置,保证两个航天器对接过程中不偏离;锥组件(左图中的右半部分)主要由椎体和锁定装置构成。
杆—锥式对接机构的对接过程:杆组件中的杆伸出,杆端进入锥内;锥面将杆端逐渐导入锥顶锁定,杆回缩,相互拉紧;对接锁将对接面锁定,密封,完成对接。右图为联盟号飞船正在靠近国际空间站,可以看到其前端的杆已经伸出到位,准备实施对接。

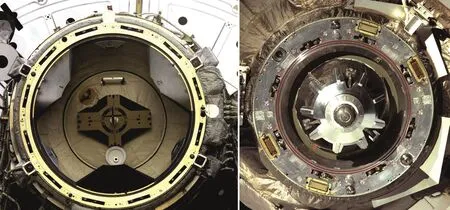
国际空间站上的俄罗斯舱段用于飞船停靠的对接口安装的是杆—锥式对接机构的锥组件。左图为国际空间站内的航天员准备开启俄罗斯舱段内对接口的锥组件,迎接与国际空间站对接的飞船中的航天员;右图为锥组件开启后,移动到旁边固定,飞船内的航天员进入国际空间站。

杆—锥式对接机构的优点是结构简单,重量较轻;缺点是对接机构全部安装在航天器壳体内部,对接后占据较大的内部空间。因此在俄罗斯的空间站舱段对接到国际空间站后,航天员就将对接机构拆除。左图为航天员正在拆除锥组件;右图为航天员拿着已经拆卸下来的杆组件。
目前使用较多的是异体同构周边式对接机构。“异体同构”是指两个航天器上的对接机构的构造是一致的,没有主动、被动之分;“周边”是指对接机构不设置在中间,而是设置在周边。由于对接机构全部设置在密封舱外的周边,因此对接后不会对通道构成影响。左图为追踪航天器,三个导向器已经伸出;右为目标航天器,导向器没有伸出。
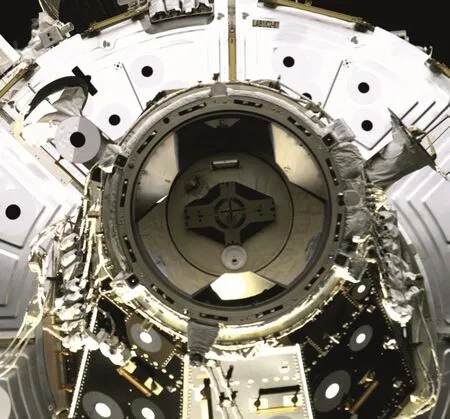
国际空间站上用于接纳航天飞机对接的对接口都设置了三个导向器内翻的异体同构周边式对接机构。画面显示,国际空间站舱段上设置在增压对接适配器前端的异体同构周边式对接机构,可以看到三个导向器均设置在对接密封面的里面的周边,并将中间的通道让开。

美国航天飞机使用的就是导向器内翻的异体同构周边式对接机构,对接机构安装在轨道器货舱前端的气闸舱端头。当不进行对接时,导向器不伸出(左图);当航天飞机作为追踪航天器,准备与其他航天器对接时,三个导向器向前伸出(右图)。
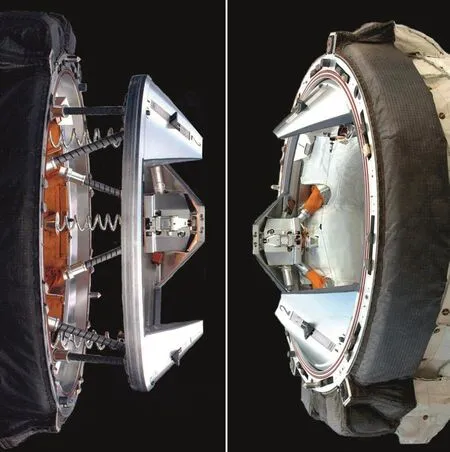
异体同构周边式对接机构的对接面(左图)有2×12共24把锁、四个气路、液路连接接头和一道密封圈;而杆—锥式对接机构的对接面(右图)有2×8共16把锁、四个气路、液路连接接头和两道密封圈。可以看到,异体同构周边式对接机构的对接面直径比较大,因此它的承载能力比较强。

航天飞机的轨道器在与国际空间站对接期间,轨道器横向移动,使已经伸出的异体同构周边式对接机构的三个导向器进入国际空间站增压适配器的对接机构内,两个对接面实现接触(左图);之后,轨道器上的对接机构回缩,将两个对接面拉紧(右图),然后锁定、密封,对接过程完成。

航天飞机的轨道器停靠在国际空间站舱段前端的增压适配器前面(左图),航天飞机内的航天员开启轨道器中舱通往气闸舱舱门和气闸舱通往国际空间站舱门,国际空间站内的航天员开启站内舱门后,航天飞机内的航天员就可以经此通道进入国际空间站(右图,在通道口下方可以看到对接机构导向器)。
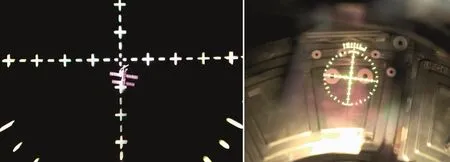
当两个准备交会对接的航天器靠拢到一定距离后,就要依靠航天器上的微波雷达、激光测距仪、摄像机、视觉校正瞄准装置等设备测量两个航天器的相对位置和相对姿态。左图为航天员使用视觉校正瞄准装置中的对接标识对准国际空间站;右图为航天员用视觉校正瞄准装置中的对接标识,对准国际空间站上的太空视觉系统靶标,准备实施对接。
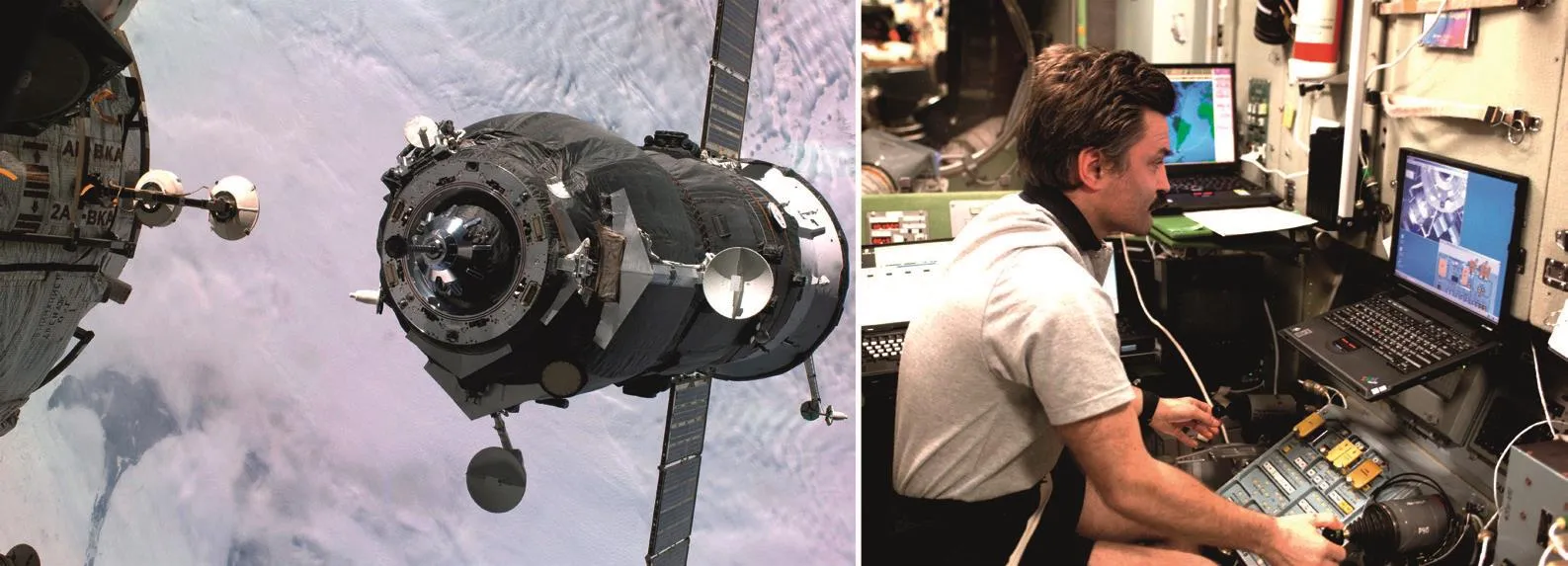
对接的控制一般有三种方式:追踪航天器自动控制或其内的航天员人工控制、目标航天器上的航天员人工控制。载人飞船和航天飞机均设置有自动控制和人工控制功能。左图为联盟号飞船即将完成与国际空间站的自动对接;右图为国际空间站上的航天员正在对准备对接的货运飞船进行人工控制。
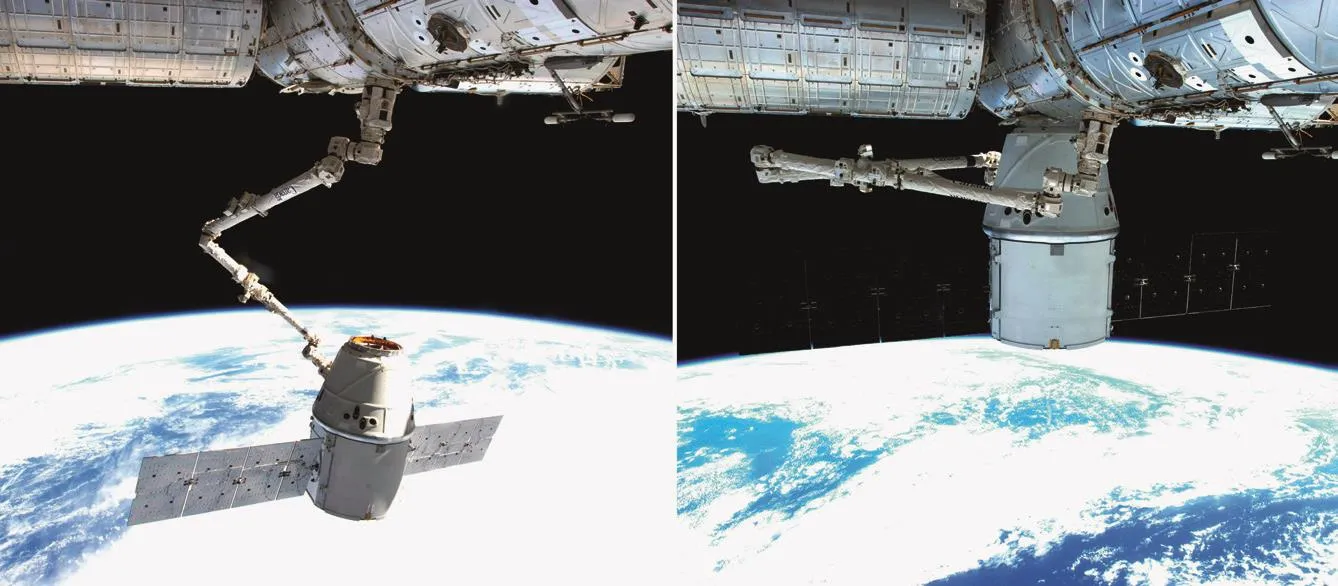
对接的控制还有另外一种方式:航天器自动飞临至国际空间站遥控机械臂能够抓握的距离,站内的航天员操作机械臂将其抓握,再将其移动至对接口实现对接。左图为国际空间站内航天员操作机械臂将靠近的龙货运飞船抓握住;右图为航天员使用机械臂将龙货运飞船对接到国际空间站上。
薛滔