基于ADRC的异步电机DTC系统仿真研究
2018-01-06李少龙杨晓洁李文龙胡静漪
李少龙,杨晓洁,李文龙,胡静漪,刘 坚,赵 琴
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于ADRC的异步电机DTC系统仿真研究
李少龙,杨晓洁,李文龙,胡静漪,刘 坚,赵 琴
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对现有异步电机DTC调速系统抗干扰能力差及转速、磁链脉动等缺陷,文中在原有系统基础上引入了自抗扰技术,构建了一种基于ADRC的异步电机DTC系统并对该系统进行了分析研究。为达到高抗干扰能力及低转速、磁链脉动的目标设计了自抗扰控制器,通过搭建Matlab仿真模型获得仿真结果,验证了在DTC调速系统中引入自抗扰控制策略可有效减小脉动情况,增强系统抗干扰能力,同时使桥路工作频率趋于稳定。
异步电机;自抗扰技术;Matlab仿真模型
现有的异步电机直接转矩控制(DTC)系统,转矩Te和磁链Ψs采用band-band调制,转矩能够快速响应的同时也会造成转矩、磁链脉动大等不良后果[1-4]。这就急需对异步电机DTC控制系统进行控制算法上的改进,从而使该系统具有更好的动态响应,达到减小转矩和磁链脉动、开关频率稳定等目的[5-6]。结合工程中PID控制器的优缺点,可引进自抗扰控制技术,在PID控制的理论基础上进行改进。为此,可引进自抗扰控制器(ADRC)技术,此方式不需要了解对象模型与获得参数的精确信息,在分析ADRC理论的基础上,可将异步电机的负载转矩变动看做该DTC系统所受到的外界扰动[7],利用自抗扰控制原理对DTC系统所受扰动的抑制能力设计ADRC速度调节器,从而提高异步电机直接转矩控制系统的自抗扰能力。
1 异步电机DTC系统
DTC控制技术是一种基于现代控制理论的调速控制算法[8-9],其系统结构如图1所示。该系统主要由速度调节器ASR、band-band调节器、电压矢量选择表、逆变器以及磁链转矩观测器等组成。
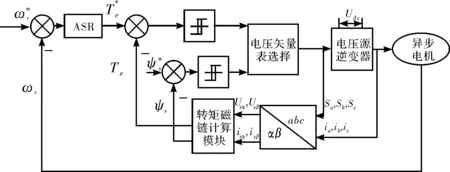
图1 异步电机DTC控制系统框图
1.1 速度调节器
速度调节器(ASR)采用比例积分进行调节,PI调节的控制表达式为
(1)
式中,Kp和Ti分别表示比例系数和积分系数。
1.2 磁链转矩调节器与计算器
在传统DTC系统中,磁链转矩采用滞环比较器来进行调节,实现对磁链进行两点式控制。对于转矩的调节也可以采用滞环比较器,达到同样的控制效果。
1.3 磁链选择器
在DTC控制中,磁链的工作区间主要被划分为6个,磁链选择器即Flux sector封装结构,通过调节定子磁链的定位角度来决定磁链工作在哪个区间。
1.4 开关表控制模块
在直接转矩调节中,开关表调节模块主要是为了获取逆变器的开关元器件的导通和关断信号,其由Look up Table(2-D)模块和多路选择器构成。
2 自抗扰控制算法原理
ADRC控制器主要由扩展状态观测器(Extended State Observer,ESO)、跟踪微分器(Tracking Differentiator,TD)和非线性状态误差反馈控制律(Nonlinear State Error Feedback Law,NLSEF)3部分组成[12-13]。其结构如图2所示,在ADRC控制器中设计“过渡环节”,主要是为了解决PID控制中误差不合理取值的问题,避免系统发生快速动态响应时产生超调,可以增加误差反馈增益以及经过微分环节后的反馈增益的选取范围,从而提高系统的抗扰性能。ESO通过状态观测把施加到被控输出的外界扰动转变成新的状态变量,之后利用反馈来创建能够用来观测扩展的状态。所以,ADRC中的ESO可以用来跟踪模型的未知部分与外部未知扰动的影响,其扩展出来的状态量可用来弥补这些扰动,被控对象的调节策略由NLSEF控制律给出[14-15]。
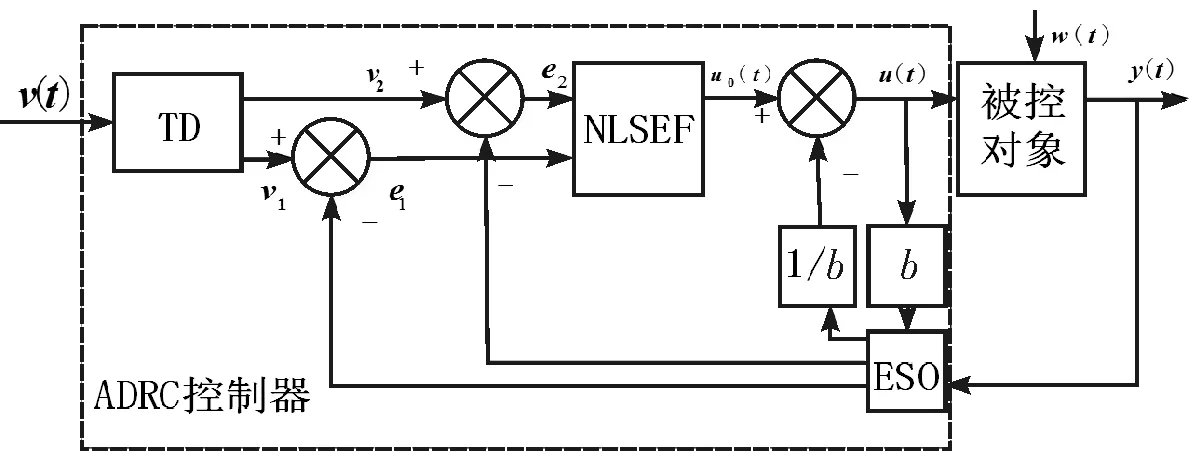
图2 ADRC控制结构图
3 自抗扰控制器设计
异步电机DTC系统的运动方程为
(2)

(3)

(4)
3.1 跟踪微分器(TD)的设计
已知最优控制函数的离散状态下的表示形式如下
u=fhan(x1,x2,r,h)
(5)
(6)
TD微分器设计中,输入信号是异步电机预先给定的转速n*,TD微分器输出是调整后光滑的跟踪信号v1,该TD跟踪器的作用是为参考的异步电机的给定转速分配一个合适的过渡过程,减小或者避免出现超调现象,获得光滑的跟踪信号以及微分信号。其状态方程为
(7)
TD微分器输出为
v1=fhan(v1-n*,r,h)
(8)
3.2 扩张状态观测器(ESO)的设计
(9)
(10)
3.3 NLSEF控制律的设计
由于TD的数学模型是一阶的,假设TD微分器的状态变量是v1,而ESO的数学模型是二阶的,假设ESO观测器的状态变量为z1,则它所扩张出来的状态变量z2就能实时估计该异步电机直接转矩控制系统所受到的外界扰动。如果将TD和ESO的状态变量进行差值运算,就能够获取到该DTC控制系统中给定的输入与输出的误差信号e1,可以用e1的非线性组合来取代PID控制的线性组合,如果令其非线性组合的输出量为u0,则可以得到
(11)
根据自抗扰控制原理,通过ESO估计出该DTC系统所受到的外界扰动估计值z2进行补偿,可以得到
(12)
结合式(11)和式(12),可获得根据该DTC控制系统设计的非线性状态误差组合的表达式为
(13)
4 仿真及结果分析
在传统DTC系统的基础上对速度调节器进行改进,采用ADRC控制代替PI调节器,搭建出基于ADRC的ASR的异步电机DTC系统如图3所示[16]。
当给定负载转矩为20 N·m,在0.15 s时转速由1 000 r/min变为500 r/min,能够获得图4所示的仿真结果图,可看到定子磁链近似成圆形轨迹进行磁链跟踪,定子磁链脉动明显减小,异步电动机转速能够快速达到转速给定值,转矩脉动相比PI控制有显著减小,DTC控制系统具备较好的动态响应性能,ADRC对n有较好调节作用。
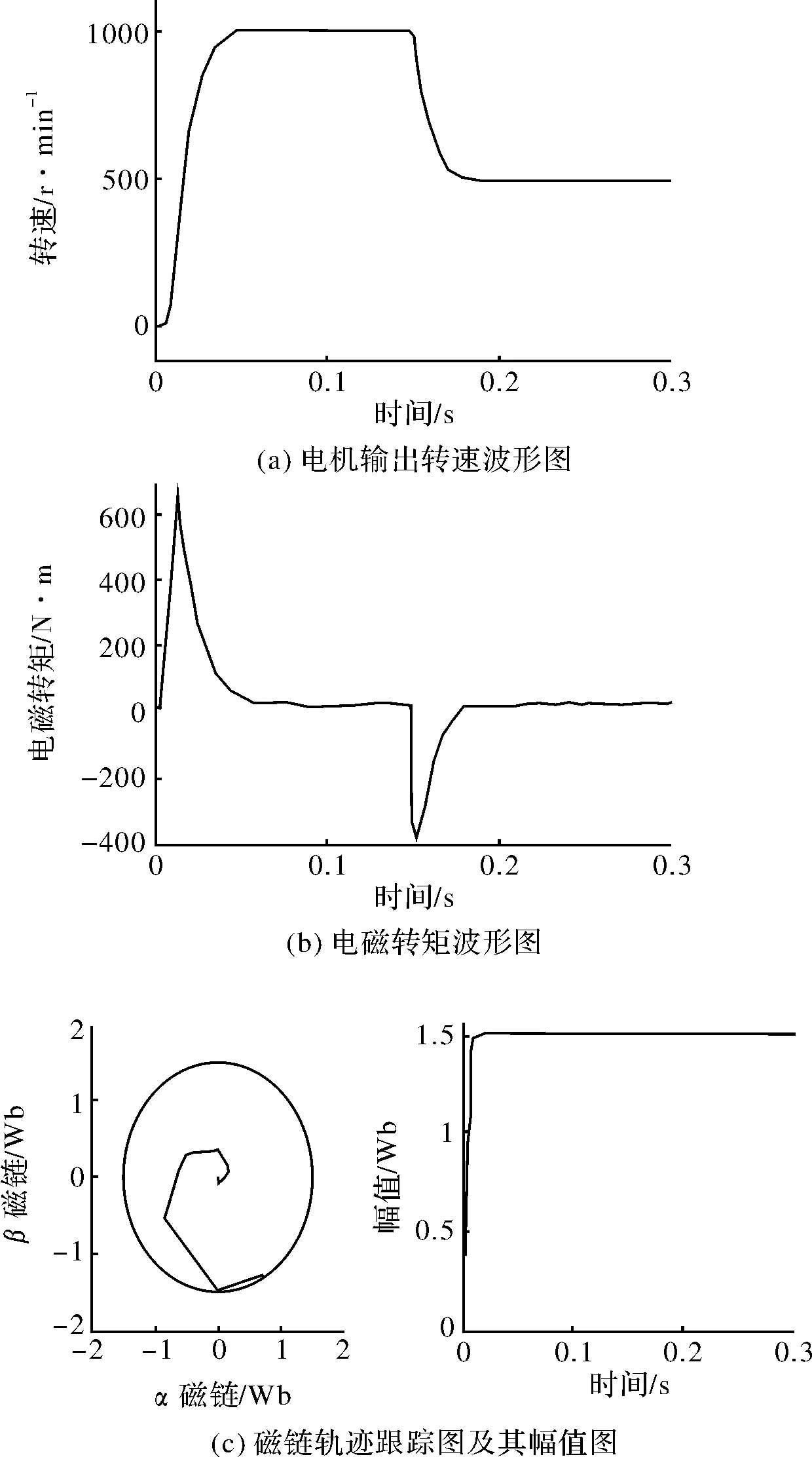
图4 给定转矩为20 N·m转速变化图
电机给定转速为1 000 r/min时,在t=0.15 s时所施加的负载转矩TL由0变为20 N·m,可得到如图5所示的仿真结果,从图中可知,当电动机负载转矩发生变化时,定子磁链近似成圆形轨迹跟踪,系统的转矩没有出现超调现象,所以此时该DTC控制系统能保持基本的稳定,从而进一步突出ADRC优良的控制性能。
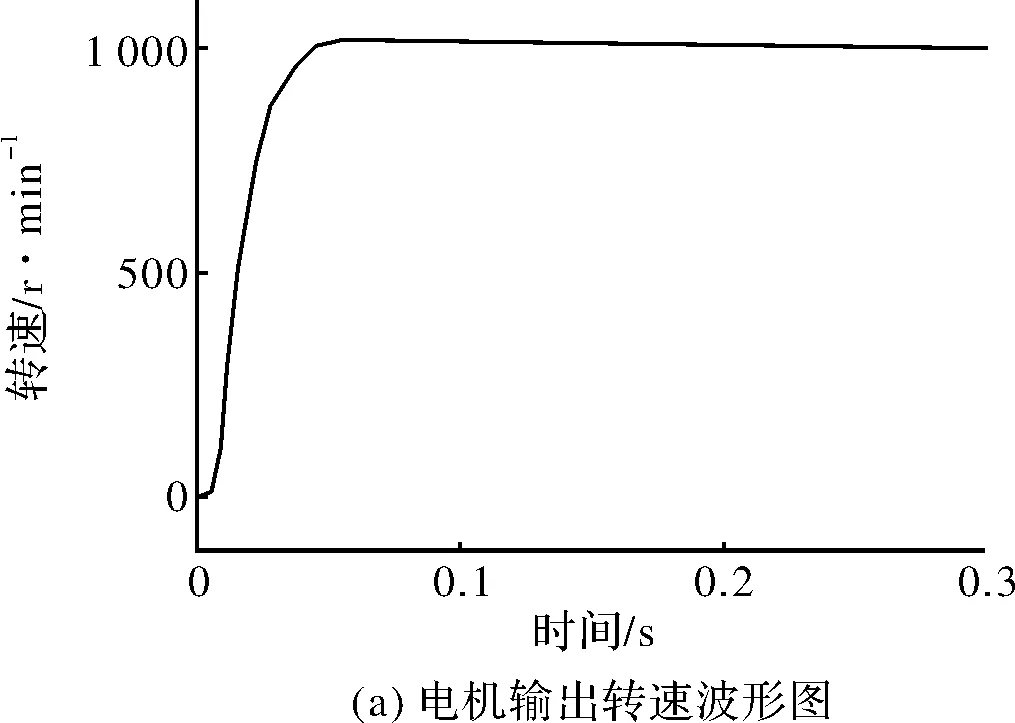
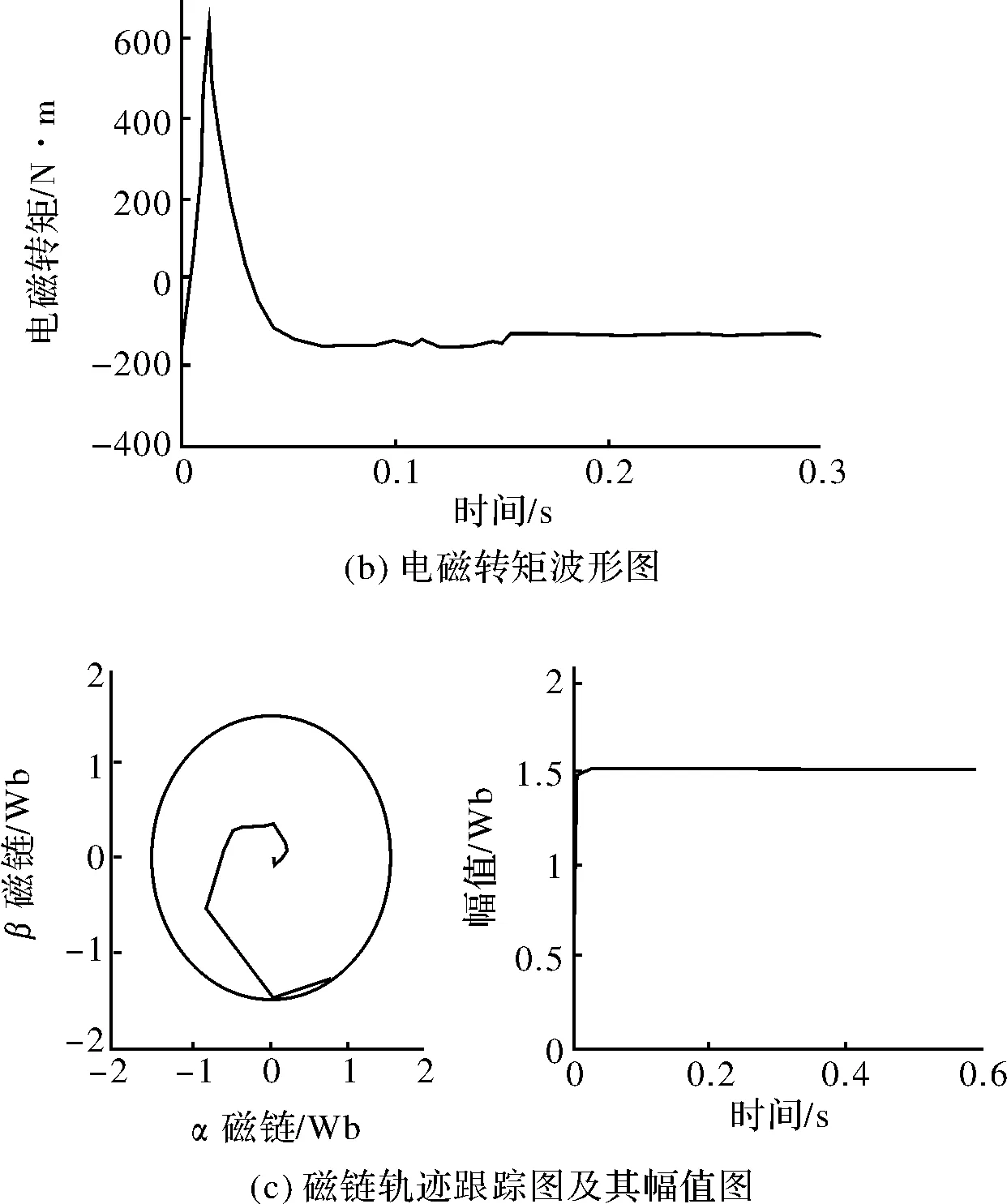
图5 给定转速n=1 000 r/min转矩变化图
当电机的给定转速为n=150 r/min,电动机处于空载启动时,可得如图6所示的波形图,可看出当异步电动机处于低速运行状态时,电机能很快达到给定转速值,且不会出现振荡和超调现象,所以此时系统不仅能保持稳定,而且在较低的速度运行时的转矩波动很明显会有所降低。

图6 n*=150 r/min的空载运行波形图
当电机的给定转速为1 000 r/min,电动机处于空载启动时,可获得如图7所示的波形图,从图中可以看出当异步电动机处于高速运行状态时,系统在很短的时间内达到给定速度,响应速度快,不会出现超调,说明电机以较高的速度运行时,能够具有较好的动、静态性能。
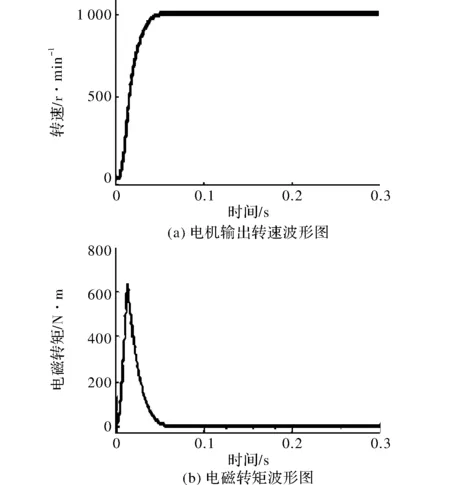
图7 n*=1 000 r/min的空载运行波形图
在传统异步电机的DTC系统的仿真结果中,可以看到异步电机在较低的速度运行时,转矩脉动会很大,并且该DTC控制系统对转速的速度大小也比较敏感,中高速运行时系统动态性能比较好,但是以较低速度运行时系统性能很差。下面给出在不同转速下的异步电动机输出转速波形图,分别选定1 000 r/min和200 r/min两种速度进行对比实验,根据不同n*下的输出转速波形,分析PI和ADRC控制的区别。从仿真对比图8中可以看出,PI控制选定的参数在异步电动机处于高速运行状态时会有较好的动态响应性能,但在低速时,动态性能已经开始变差,需要重新调整PI参数,但ADRC选定一组参数后,无论电动机是较低的速度还是较高的速度运作时,都能具有较好的动态响应性能。
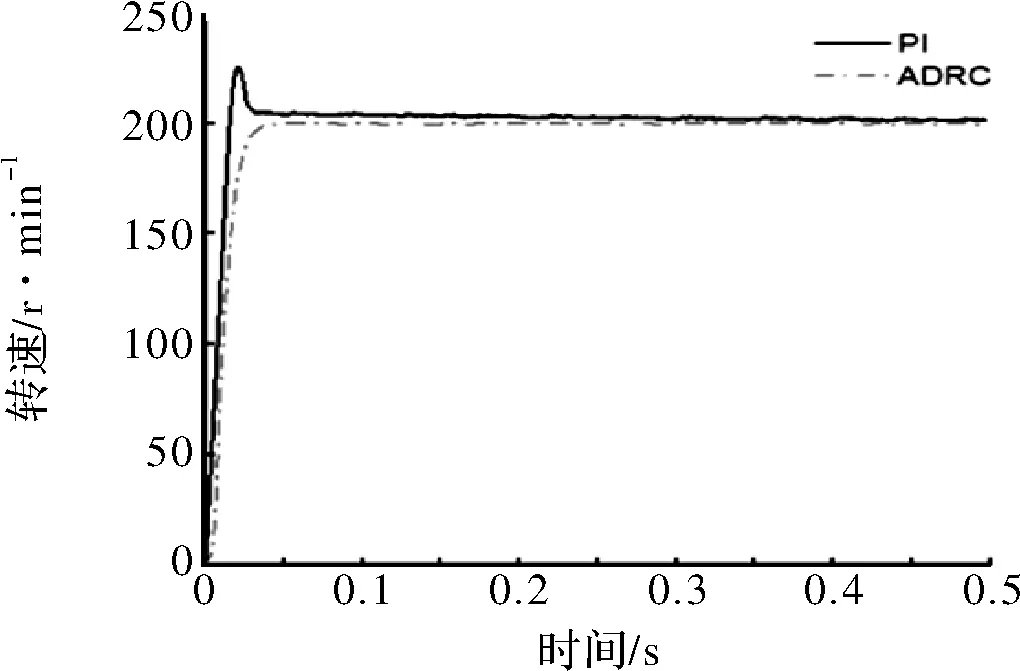

图8 PI控制与ADRC控制对比图
5 结束语
本文阐述了异步电机DTC系统的基本组成模块,通过在Matlab-Simulink中搭建整个异步电机DTC控制系统进行初步的理论上的实验仿真。虽然速度调节器采用PI控制器能达到很好的转速控制效果,但通过对异步电机在空载和加载运行分析可以看到,DTC在控制过程中会产生较大的转矩和磁链波动,定子电流输出也不稳定,虽然转矩和磁链调节器采用两点式控制,可以有效控制转矩和磁链幅值大小,但会使得逆变器开关频率的增加,使得异步电机在整个运作过程中出现开关频率不稳定等现象。本文通过分析传统DTC控制系统存在的不足,设计了一种可以弥补PI控制器不足的ADRC控制器,使得电机不论处于低速还是高速运行状态,转矩和磁链波动都有明显减小,系统的稳定性有所改善,进一步提高了系统的鲁棒性。
[1] 林渭勋.现代电力电子技术[M].北京:机械工业出版社,2006.
[2] 陈伯时.电力拖动自动控制系统:运动控制系统[M].北京:机械工业出版社,2003.
[3] 郭有贵,潘东卿,邓成,等.基于SVPWM异步电机直接转矩控制研究[J].系统仿真学报, 2016,28(2):483-491.
[4] 张爱玲,王震宇,杨文杰.直接转矩控制系统中减小转矩脉动方案的比较[J].电机与控制学报,2008,12(5):566-570.
[5] Lascu C,Jafarzadeh S,Fadali S,et al.Direct torque control with feedback linearization for induction motor drives[J].IEEE Transactions on Power Electronics,2016,20(14):1-1.
[6] Salem F B,Derbel N.Investigation of SM DTC-SVM performances of IM control considering load disturbances effects[C]. MA,USA:International Multi-Conference on Systems, Signals & Devices,2016.
[7] 任一峰,刘刚,赵敏.自抗扰技术在异步电机DTC系统中的应用[J].电气传动,2009,39(6):15-18.
[8] 万宇宾,胡婵娟,赵金,等.基于ADRC的直接转矩控制系统及其性能[J].武汉大学学报:工学版,2009,42(1):114-118.
[9] 付家才,魏超全.CE-ADRC异步电机直接转矩控制系统研究[J].工业仪表与自动化装置,2014(2):117-120.
[10] Ren Y,Duan X.Research of active disturbance rejection controller in speed regulation of induction motor[C].MA,USA:International Conference on Mechanic Automation & Control Engineering,IEEE,2011.
[11] Wu Qizhou.Study on direct torque control of induction motor based on DRNN-ADRC[J].Control Engineering of China,2011(7):98-103.
[12] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[13] 黄文新,李勇,胡育文.用空间电压矢量调制异步电动机的直接转矩控制[J].南京航空航天大学学报,2007,39(1):127-132.
[14] Aissa O,Moulahoum S,Colak I,et al. Improved performance and power quality of direct torque control of asynchronous motor by using intelligent controllers[J].Electric Power Components & Systems,2016,44(4):343-358.
[15] Liu X,Zheng A.New direct torque control of asynchronous motor with low ripple in torque and current, and quick response[C].Taipei:IEEE Transportation Electrification Conference and Expo,Asia-Pacific,2016.
[16] Li M,Zhou Z,Huang S,et al.Efficiency optimization of asynchronous motor direct torque control based on feedforward compensation[J].China Mechanical Engineering,2015(9):103-108.
Simulation Research on DTC System of Asynchronous Motor Based on ADRC
LI Shaolong,YANG Xiaojie,LI Wenlong,HU Jingyi,LIU Jian,ZHAO Qin
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology, Shanghai 200093,China)
In view of the defects of the existing asynchronous motor DTC speed regulation system, such as poor anti-interference ability, speed and flux ripple. In this paper, based on the original system, the auto disturbance rejection technique is introduced, and a DTC system of asynchronous motor based on ADRC is constructed. In order to achieve the goal of high anti-interference ability, low speed and flux ripple, an auto disturbance rejection controller was designed. The simulation results were obtained by building the Matlab simulation model. It is verified that the auto disturbance rejection control strategy can effectively reduce the fluctuation of the DTC speed regulation system, enhance the anti-interference ability of the system, and make the working frequency of the bridge to be stable.
asynchronous motor; ADRC technology;Matlab simulation model
2017- 03- 22
国家自然科学基金(61205076);电动叉车控制器的研发(3A16302075)
李少龙(1972-),男,硕士,讲师,研究方向:电力电子非线性及控制。
TN773;TM 46
A
1007-7820(2018)02-035-05
