光伏系统最大功率跟踪算法的研究
2018-01-06金爱娟纪晨烨郑柯童周宗禥李世林徐大壮
金爱娟,纪晨烨,郑柯童,周宗禥,李世林,徐大壮
(上海理工大学 光电信息与计算机工程学院,上海 200093)
光伏系统最大功率跟踪算法的研究
金爱娟,纪晨烨,郑柯童,周宗禥,李世林,徐大壮
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对传统光伏发电系统中最大功率点跟踪的问题和缺陷,文中提出了基于模糊控制的扰动观察法的方法,将模糊控制器应用于扰动观察法中。详细描述了模糊逻辑控制器的设计步骤,并且搭建了光伏发电系统的各个仿真模型。通过对比两种方法的仿真结果,得出了新方法具有较快的跟踪速度、能有效减小最大功率点附近振荡导致的功率损耗、且提升了系统效率的结论。
模糊控制;最大功率点跟踪;扰动观察法
光伏阵列最优工作点称为最大功率点,最大输出功率即为额定功率。光伏阵列可以看成是多个单太阳能电池按照串并联组成的,只是相当于各个参数按一定比例放大罢了[1]。光伏阵列最大功率主要了由光伏组件的工作温度和当时的光照强度决定的,在光照强度和环境温度有差别的情况下,会有不同的最大功率点,因而,为了能使光伏组件产生的直流电能能够最大的、及时的提供给负载,必须进行最大功率的跟踪,才能提高能量转换效率。
通过调节负载阻抗大小的方式来达到最大功率输出在实际应用中不易实现,而本质上,最大功率点跟踪(MPPT)实现是一个动态寻优过程[2],寻找合适的MPPT算法是MPPT技术实施的最重要部分,使得光伏电池阵列能够及时、快速地跟踪最大功率点。
近年来,许多控制MPPT电路方法已经得到了验证,其中在实际中应用最广泛的就是扰动观察法。从扰动的对象区分,分别为基于光伏阵列输出电压的扰动观察法和基于变换器占空比的扰动方法,以Boost变换器为最大功率跟踪电路为例,分别分析这两种扰动跟踪方法的动态特性和对输出电压的影响,并提出了一种基于输出电压扰动的改进的扰动观察法。
1 基于模糊控制的改进的扰动观察法
作为光伏发电系统高效利用太阳能的关键技术之一,MPPT控制方法已经有很多种,各有优劣势,根据对比结果,基于光伏阵列输出电压参考值的扰动观察法跟踪效率优势明显,并且比较容易实现,因此得到了广泛应用[3]。
在实际操作中,无法忽视扰动观察法的缺点:首先,电路会在最大功率点附近发生振荡,不能稳定下来;其次,在控制输入电压的扰动量固定不变时,当外界光照强度发生变化时,参考电压的调整方向会发生误判,从而失去跟踪能力[5]。除此之外,在扰动步长变短时,那么在抵达最大功率点处的振荡幅度也会变小,能量消耗变小,但是运行时间会变得比较长;同理,步长较大时,虽然抵达最大功率点的时间不会增加,但是能量消耗会变的很大。因而,可以采取变步长的方法,既能兼顾光伏系统的响应速度又能考虑到稳定状态时的精度,期望获得想要的结果[6]。
由光伏阵列P-U线的斜率dP/dU可推出如下的规律
(1)
观察图形,从dP/dU绝对值可以看出,在最大功率点附近均遵循规律:dP/dU的绝对值都是随着逐渐接近最大功率点而单调递减,dP/dU的绝对值会在达到最大功率点时变为零[7]。
根据上式,可以构造扰动电压的表达式
(2)
其中,ΔU为正数,代表变步长电压速度因数,可以用来改变跟踪的速度。
2 模糊控制器的设计
对于传统控制系统而言,其分析和设计,重点在于首先要基于工作原理和系统辨识建立被控对象和控制系统的数学模型,并将此作为整个控制系统建模、分析、设计的基础。
然而,对于模糊控制系统而言,其分析和设计则完全不同,无需关注被控对象的内部结构、工作原理和数学模型。模糊控制设计的主要过程如下:先根据对被控对象的操作经验和策略,写成模糊规则;加上被控系统的输入和输出的数据,经过分析,形成模糊数据库[8]。通过选定输入输出量、隶属度函数、模糊子集,确定模糊规则,设计出模糊控制器,主要流程如图1所示。

图1 模糊控制器设计主要流程图
第一步,确定输入、输出物理量。控制器的输入为控制误差E和误差的变化率EC,即
(3)
EC=E(k)-E(k-1)
(4)
第k时刻的扰动步长值作为输出。紧接着确定输入、输出的论域以及对应的隶属度函数,在本文仿真实验中设定输入和输出均有7个模糊子集,即

(5)
同时,根据模糊控制的一般经验规律,E和EC的论域,输出D的论域为。根据光伏电池的特点,选取隶属度函数为三角形隶属度函数,如图2所示。解模糊的方法为面积中心法[9]。


图2 模糊控制器各输入输出隶属度函数
第二步,确定控制策略。在本文中,控制策略如下:
(1)当E>0,EC>0,时,新的扰动步长为正值;
(2)当E>0,EC<0,时,新的扰动步长可以不变;
(3)当E<0,EC>0,时,新的扰动步长可以不变;
(4)当E<0,EC<0,时,新的扰动步长为负值;
(5)如果当前功率与最大功率相比,差值较大时,采用较大步长;如果当前功率与最大功率相比,差值较小时,采用较小的步长。
以上控制策略,可以根据模糊控制规则的书写原则,如表1所示。

表1 模糊控制规则表
根据式(2),变步长扰动因子D决定变步长扰动观察法最大功率跟踪性能的关键参数,科学合理的确定该值。
对于基于扰动的自寻优控制方法而言,文献研究表明,只有满足光伏电池阵列输出功率的变化量大于光照强度的变化量时,才不会发生误判[10],即
|ΔP|>|ΔPS|
(6)
式中,ΔP为光伏电池阵列输出功率的变化量,ΔPS为光照强度的变化量,这样在接近最大功率点处,基于电压输出的扰动观察法不会出现过大的振荡,也不会发生误判。在最大功率点处,这样可以获得信息
(7)
如果光照强度不变,当光伏电池工作点在最大功率点时[11],由式(7)可得
(8)
为计算方便,做以下假设
(9)
综合上式,可得
(10)
同样,对于光照强度的变化量,有
Δps=UmppΔiC+ImppΔupv+ΔupvΔiC
(11)
考虑到影响较小,可以忽略,式(11)可以写为[12]
Δps≈UmppΔiC=UmppKΔS
(12)
结合式(6),分析比较式(10)与式(12),得到
(13)
通过整理,可得
(14)
通过对变步长扰动因子加以限制,就可以决定输出扰动因子D,从而可以避免光照强度剧烈变化时导致的误判现象。
3 基于模糊控制的扰动观察法仿真
在Matlab/Simulink环境中,分别对于传统扰动观察法和基于模糊控制的扰动观察法的最大功率进行仿真,主电路均为Boost电路,如图3所示。区别于MPPT模块,仿真模型分别如图4和图5所示。
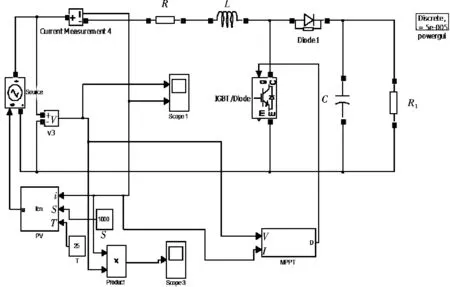
图3 基于扰动观察法控制的仿真模型

图4 传统扰动观察法MPPT子模块
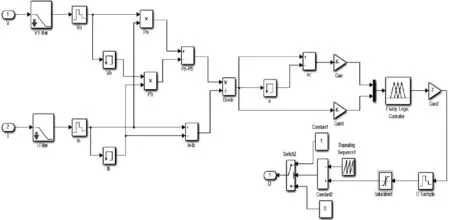
图5 模糊控制扰动观察法MPPT子模块
设置初始条件:光照强度0 W/m2,温度25 ℃,仿真时间为0.4 s,仿真结果如图6所示。
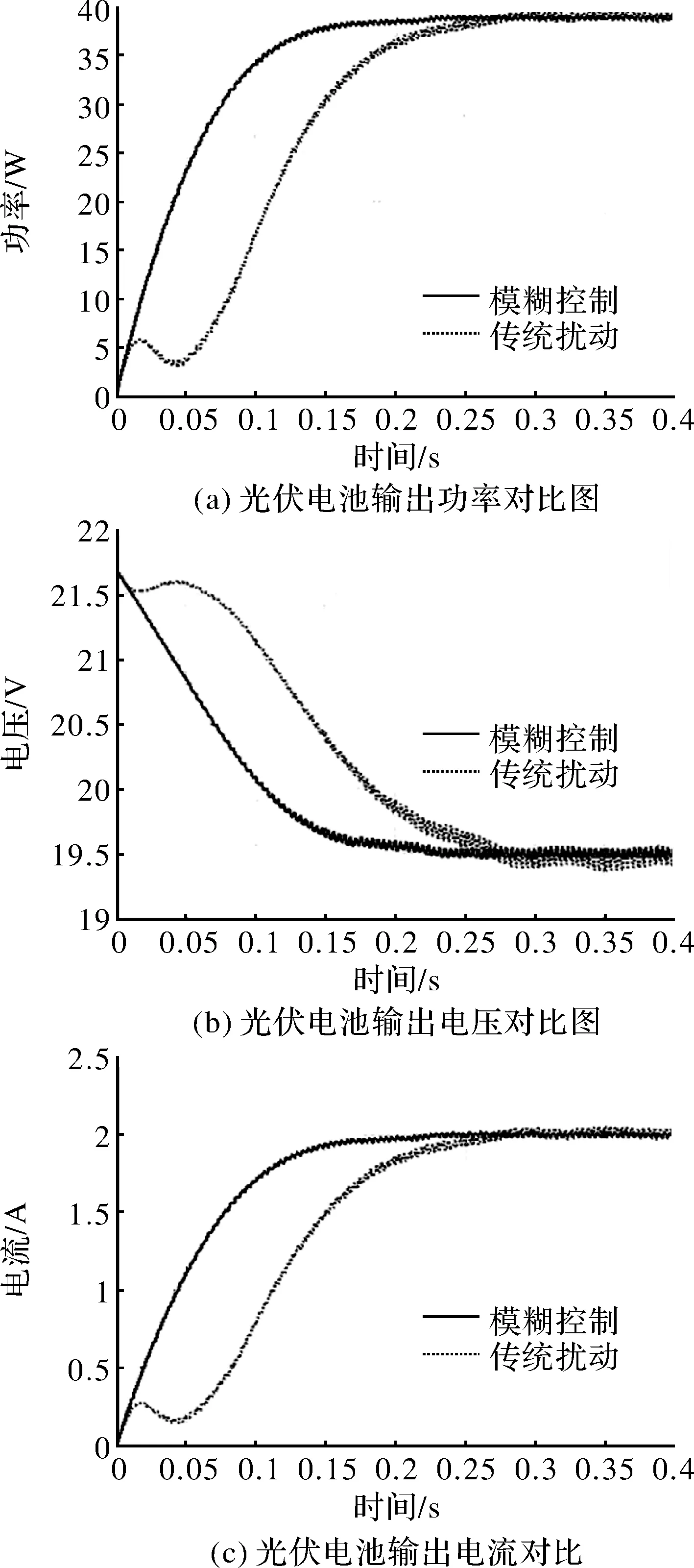
图6 光伏电池模糊控制与传统扰动对比
观察图6(a),模糊控制扰动观察法约在0.2 s就能达到稳定状态,而传统的扰动观察法需要约0.3 s才逐渐达到稳定状态,因而模糊控制方法的响应速度明显加快,增加了约33%的效率[13]。
观察图6(b)和图6(c),可以发现,传统的扰动观察法输出电压、电流在稳态的时候振荡幅度比模糊控制输出大。
观察图6(a)也可以看到,基于模糊控制的扰动观察法在达到最大功率点时也是会有振荡的,由于模糊控制的 P&O 也属于动态自寻优法,难免在接近最大功率点附近也有振荡,但与传统扰动观察法相比,其振荡很小。为进一步观察,进行了光伏电池输出功率对比放大,如图7所示。
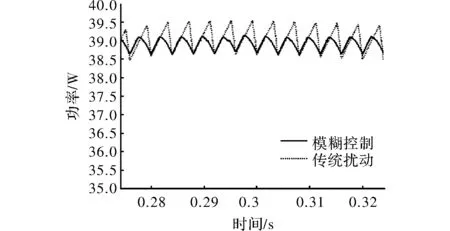
图7 光伏电池输出功率对比放大图
功率振荡的幅度与扰动步长的大小有关。为进一步分析扰动步长的大小与振幅的关系[14],通过分析可知,模糊控制的扰动观察法的扰动步长在光照稳定后几乎不变,而传统扰动观察法的扰动步长却在最大功率点附近进行振荡,会造成功率的振荡和功率损失。基于上述综合分析,可知模糊控制的扰动观察法性能更优越:即具有较快的响应速度、更好的稳定性以及较低的功率损失[15]。
4 结束语
本文运用改进的最大功率点跟踪算法即基于模糊控制的变步长扰动法进行优化,仿真结果验证了基于模糊控制的变步长扰动观察法能够快速响应;并且为了解决光照强度突变导致的跟踪方法失效问题,引入最小步长的计算公式。通过对比两种方法的仿真结果,得到结论:新方法能有效减小最大功率点附近振荡导致的功率损耗,且具有较快的跟踪速度,从而较好地解决了传统方法的不足,能够最大程度地提升系统效率、降低功率损耗。
[1] 黄碧斌,李琼慧,蒋莉萍.德国分布式电源的发展经验及其启示[J].中外能源,2013,18(6):26-30.
[2] 吴海晴,苏湛沈,昱明,等.非线性系统的自适应模糊控制器设计[J].电子科技,2016,29(7):36-39.
[3] 桂仁,郝润科,张艳,等.基于MPPT技术的光伏充电系统设计[J].电子科技,2016,29(4):16-19.
[4] 马胜红,许洪华.我国光伏产业发展探讨[J]. 太阳能,2003(6):5-9.
[5] 赵勇.光伏发电系统中最大功率跟踪控制的研究[D].太原:太原科技大学,2012.
[6] 周宇飞,陈军宁,谢智刚,等.参数共振微扰法在Boost变换器混沌控制中的实现及其优化[J].物理学报,2004,53(11):3676-3683.
[7] 张俊红,魏学业,谷建柱,等.光伏电池阵列改进MPPT控制方法研究[J].北京交通大学学报:自然科学版,2013,37(2):12-16.
[8] Femia N,Petrone G,Spagnuolo G,et al. Optimization of perturb and observe maximum power point tracking method[J].IEEE Transactions on Power Electronics,2005,20(4):963-973.
[9] 潘玉良,施浒立.光伏发电系统最大输出效率探索[J].电子工程师,2001,27(9):50-53.
[10] Pyragas K.Delayed feedback control of chaos[J].Philosophical Transactions of the Royal Society A Mathematical Physical & Engineering Sciences,2006, 364(6):2309-2334.
[11] Wu T F,Chang C H,Chen Y K.A fuzzy-logic-controlled single-stage converter for PV-powered lighting system applications[J].IEEE Transactions on Industrial Electronics,2000,47(2):287-296.
[12] Khaehintung N,Sirisuk P.Implementation of maximum power point tracking using fuzzy logic controller for solar-powered light-flasher applications[C].Russia:47th Midwest Symposium on Circuits and Systems,IEEE, 2004.
[13] Veerachary M,Senjyu T,Uezato K. Feedforward maximum power point tracking of PV systems using fuzzy controller[J].IEEE Transactions on Aerospace & Electronic Systems,2002,38(3):969-981.
[14] Smedley K M,Cuk S.One-cycle control of switching converters[J].IEEE Transactions on Power Electronics,1995,10(6):625-633.
[15] Smedley K M,Cuk S.Dynamics of one-cycle controlled Cuk converters[J].IEEE Transactions on Power Electronics,1995,10(6):634-639.
Research of Maximum Power Point Tracking Algorithm for Photovoltaic System Converter
JIN Aijuan,JI Chenye,ZHENG Ketong,ZHOU Zongqi,LI Shilin,XU Dazhuang
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
Aiming at the problems and defects of the maximum power point tracking in the traditional photovoltaic power generation system, a method based on fuzzy control is proposed. A detailed description of the design procedure of the fuzzy logic controller, and set up the simulation model of photovoltaic power generation system, through the comparison of the simulation results of the two methods, the result shows that the new method has faster tracking speed, can effectively reduce the oscillation near the maximum power point caused by power loss, and improve the efficiency of the system is the conclusion.
fuzzy control;maximum power point tracking;perturbation observation
2017- 03- 22
国家自然科学基金(61205076);电动叉车控制器的研发(3A16302075)
金爱娟(1972-),女,博士,副教授。研究方向:综合控制、信息控制等。纪晨烨(1994-),女,硕士研究生。研究方向:综合控制、信息控制等。
TN36;TM46
A
1007-7820(2018)02-024-05
