基于改进型MRAS的异步电机无传感器矢量控制策略研究
2018-01-05赵龙龙李百宇常国祥
赵龙龙,李百宇,常国祥
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
基于改进型MRAS的异步电机无传感器矢量控制策略研究
赵龙龙,李百宇,常国祥
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
针对传统异步电机电压模型磁链估计算法存在积分初值与直流漂移问题,采用一阶惯性滤波器代替纯积分器,并将实际磁链经低通滤波,后用以补偿低通滤波器所引入的幅值与相位误差。应用Matlab建立改进型基于模型参考自适应的无速度传感器矢量控制系统模型,且异步电机以三电平简化算法SVPWM逆变器驱动。结果表明,辨识转速和反馈转速在电机启动、升降速、加载过程中有良好的一致性,转速辨识精度较高且具有良好稳态特性和动态响应能力。在给定转速变化和负载扰动情况下,系统具有鲁棒性。
无速度传感器矢量控制;模型参考自适应系统;转速辨识;低通滤波器; SVPWM简化算法
相比传统的感应电机矢量控制系统,无速度传感器矢量控制系统降低了硬件复杂度和维护成本,提高了系统的抗干扰能力和稳定性,并能够在一些比较恶劣的环境运行,因而获得了越来越广泛的应用[1-6〗[7]。相比于其他方法,模型参考自适应算法由于原理比较简单,易于实现,同时转速估计精度和动态性能比较好,是当前应用比较多的一种转速辨识方法。该方法中传统的获得转子磁链信息是直接对磁链微分方程进行积分,导致参考模型磁链观测器存在积分初值问题与直流漂移问题。为解决该问题,文献[8]以一种带限幅反馈环节的积分器代替纯积分器;文献[9]将滑模变结构控制方法引入自适应控制系统中,以牺牲系统结构复杂性,来解决滑动模态的抖动问题,获得了精确的辨识转速,以上不同程度地解决了积分问题。
本文采用一阶惯性滤波环节替代纯积分环节,由于这种替代会引起转子观测磁链幅值和相位误差,可以由实际的励磁电流或者实际的转子磁链进行补偿,以提高系统的动态性能。
1 转子磁场定向无速度传感器矢量控制原理
1.1 异步电机数学模型
由于转子磁场定向具有良好的解耦特性,通常选取两相同步旋转坐标系中m轴为转子磁链Ψr的方向,转子磁场定向下异步电机定、转子绕组电压方程为:
(1)
式中:usm、ust,ism、ist,urm、urt分别为定、转子电压,电流m-t轴分量;Rs、Rr为定、转子电阻;Ls、Lr、Lm为定、转子自感与定转子间互感;ωe为定子同步角速度;ωs为转差角速度;p为微分算子。
磁链方程为
(2)
式中:Ψsm、Ψst为定子磁链m-t轴分量;Ψr为转子磁场定向磁链。
转矩方程为
Te=npLm(istirt)=npΨrLmist/Lr
(3)
式中:np为极对数。
1.2 三电平逆变器供电异步电机前馈解耦矢量控制
由式(1)所得的电压分量是相互耦合的,为独立控制定子电流的励磁分量和转矩分量,因此有必要对定子电压进行解耦控制,解耦后的定子端电压为
(4)
其中,
(5)

2 积分改进型转子磁链观测器
对于高性能异步电机无速度传感器矢量控制系统,磁链估计是一个必须解决的重要问题,由于缺少转速信号,通常采用电压模型来进行磁链估计。电压模型物理意义明确,只需要对定子的反电动势积分就可获得转子磁链,且仅需要一个定子电阻参数。
2.1 改进电压模型转子磁链观测器
异步电机在两相静止坐标系上的转子磁链电压、电流模型如下。
电压模型:
(6)
电流模型:
(7)
式中:Ψrα、Ψrβ为转子磁链在α-β轴分量;urα、urβ,irα、irβ为定子电压,电流α-β在轴分量;Tr为转子时间常数,Tr=Lr/Rr。
由式(6)可知,转子磁链电压模型中不含有转子电阻Rr,受电机参数影响较小。但电压模型中包含积分环节,磁链估计存在初值问题与直流漂移问题。为了避免纯积分环节所带来的问题,实际应用时常采用一阶惯性环节代替纯积分环节,可有效消除积分初值引起的输出误差,然而直流量的增益却不为零,在此将实际磁链低通滤波后,用以补偿低通滤波器所引入的幅值与相位误差。改进电压模型如图1所示。

图1 改进电压模型Fig.1 Advanced voltage model
改进电压模型在补偿量生成的前向通道端加入基于转子磁链定向坐标系中的转子磁链电流模型,即励磁电流ism,用以适应动态时励磁变化的场合。转子磁链状态估计Ψr的动态方程如下:
(8)
稳态方程
(9)

2.2 模型参考自适应转速辨识


图2 MRAS转速观测器Fig.2 Speed observer based on MRAS
根据Popov超稳定性理论,该系统是渐进收敛的[10]。取比例积分自适应律得转子角速度辨识公式为
(10)

3 仿真验证与结果分析
3.1 系统结构设计
图3为基于MRAS无速度传感器矢量控制系统原理图。外环由磁链环和转速环构成,内环为两个电流环,分别调节励磁电流分量和转矩电流分量。其中,三电平SVPWM调制模块采用基于60°坐标系的简化算法,与传统需求解大量三角函数的SVPWM算法相比,简化算法大大减少了计算量,为空间矢量PWM控制提供了一种行之有效的方法。

图3 基于MRAS无速度传感器矢量控制系统原理图Fig.3 Principle diagram of speed sensorless vectorcontrol system based on MRAS
3.2 仿真分析
应用MATLAB/Simulink建立了异步电机矢量控制系统仿真模型。仿真中异步电机及调节器PI参数见表1。

表1 异步电机及PI参数Table 1 Parameters of asynchronous machine and PI
3.2.1 空载性能
图3为空载时辨识转速、反馈转速及定子线电压波形,其中图3(a)和3(b)分别为改进后和改进前电压模型仿真结果。初始给定转速60 rad/s、0.8 s时刻给定转速调整为125 rad/s、1.6 s时刻给定转速再次调整为80 rad/s。刚启动过程中,因励磁充磁,出现不同程度震荡,约0.06 s稍经调整后趋于平稳;系统达到稳态时,辨识转速、反馈转速均很好地稳定在给定转速;辨识转速较反馈转速先达到稳态,保证了系统的稳定性;线电压波形呈五电平,波形正弦度好,证明了基于SVPWM简化算法矢量控制的可行性。由图3(b)能够看出约0.8~1.6 s时间段内电机转速不平稳,呈下降趋势, 降幅达13 rad/s,证明了改进后电压模型的有效性。
图4为α-β轴转子实际磁链与估计磁链波形,由局部放大图可知,估计磁链响应比实际磁链快,保证了辨识转速比反馈转速提前达到稳态,确保了整个系统的稳定性;在动态、稳态时,估计磁链与实际磁链均基本吻合。
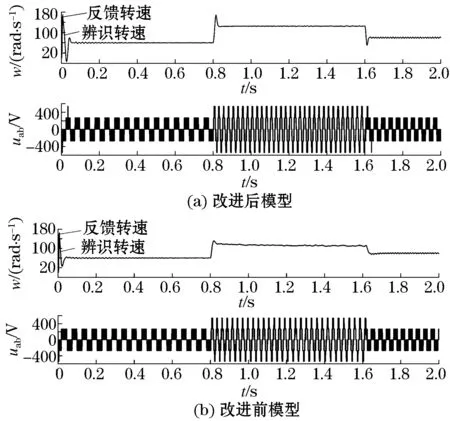
图4 电机转速和电压波形Fig.4 Waveforms of rotor speed and stator voltage
3.2.2 负载性能
图5为1 s时刻电机突加负载时的辨识转速、反馈转速及定子线电压波形,其中图5(a)和5(b)分别为改进后和改进前电压模型仿真结果。1 s前系统转速由60 rad/s上升到125 rad/s,辨识转速和反馈转速均很好地稳定在给定转速,转速误差几乎为零;1 s时刻,电机突加20 N · m负载后,转速略微下降,降低约7 rad/s,但稍经调整后很快恢复到给定转速,说明该转速辨识方法具有较强的抗负载能力。由图5(b)能够看出约0.4 s时刻后速度不平稳,辨识转速与反馈转速变化步调虽一致,但速度整体上呈下降趋势,尤其是加载后降幅高达25 rad/s,证明了改进后电压模型在给定转速变化和负载扰动情况下系统具有较好鲁棒性。
图6为电机加载后转子估计磁链与实际磁链波形。当电机突加20 N · m负载时,转子估计磁链与实际磁链疏密程度变化甚小,同时估计磁链很好地跟踪了实际磁链,保证了转速辨识的准确性。

图5 α、β轴转子实际磁链与估计磁链波形Fig.5 Waveforms of actual rotor flux and estimated flux in α-β coordinate

图6 电机转速和电压波形Fig.6 Waveforms of rotor speed and stator voltage
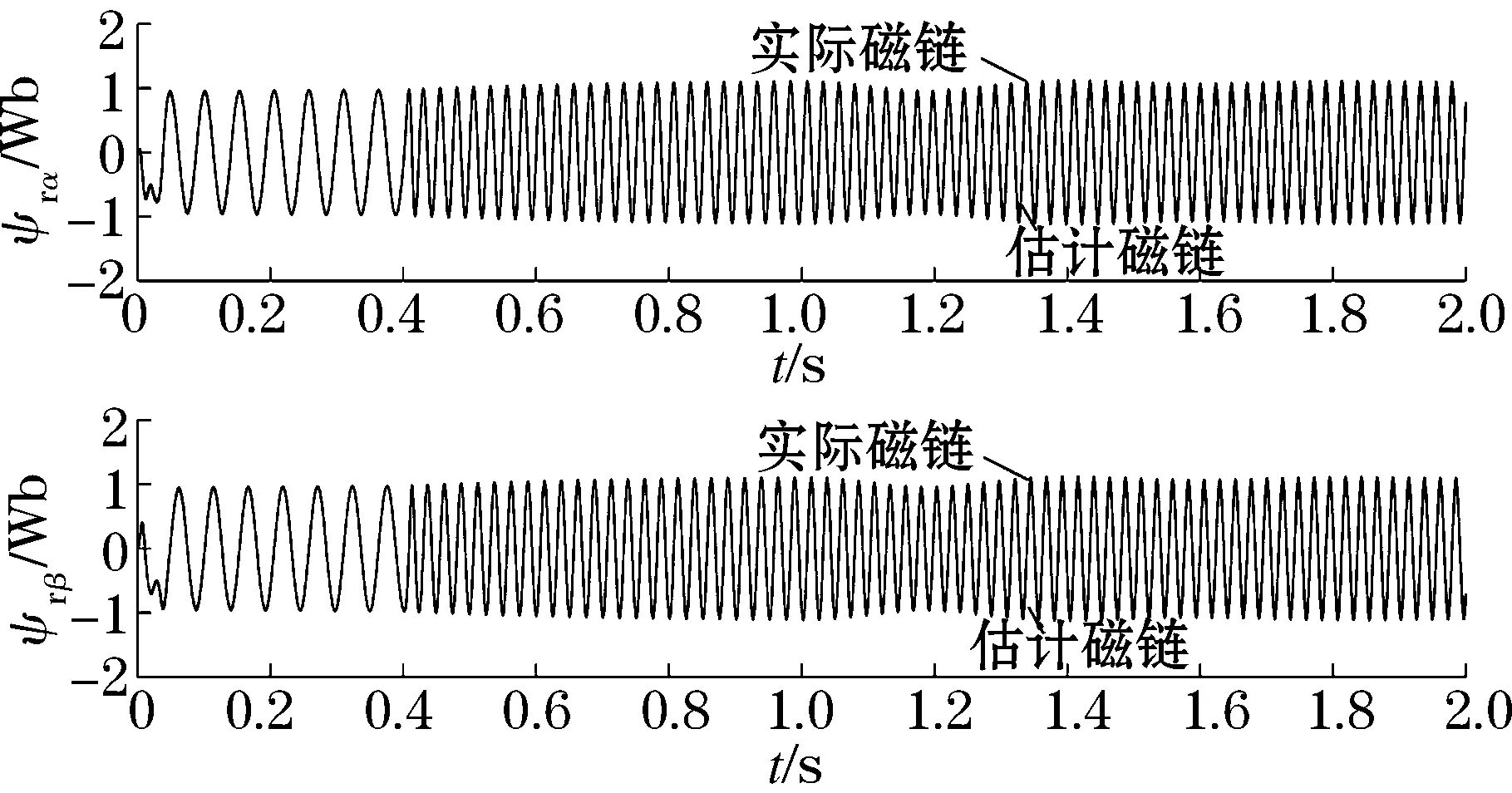
图7 α、β轴转子实际磁链与估计磁链波形Fig.7 Waveforms of actual rotor flux and estimatedflux in α-β coordinate
4 结 论
通过对改进型基于模型参考自适应的无速度传感器矢量控制系统,用于三电平SVPWM逆变器驱动异步电机间接矢量控制进行仿真研究,可以得出如下结论:
1)相比纯积分器获得磁链信息,改进型磁链观测器具有更好的稳态精度和动态跟踪能力。
2)基于改进模型参考自适应转速辨识方法估计转速精度高、响应快、转速上升平稳且超调量小,具有较强的抗负载能力。
3)驱动异步电机的三电平简化算法SVPWM逆变器输出电压波形质量好,正弦度高。
[1] 常乾坤,葛琼璇,雷鸣,等. 一种高性能感应电机无速度传感器矢量控制策略[J].电机与控制学报, 2014,18(12):85-94.
CHANG Qiankun, GE Qiongxuan, LEI Ming, et al. High performance machine sensorless vector control strategy[J]. Electric Machines and Control, 2014, 18(12): 85-94.
[2] 姜宏丽, 宗伟, 刘其辉,等. 改进电压模型的异步电机无速度传感器矢量控制[J].电气传动, 2015,45(2):8-12.
JIANG Hongli, ZONG Wei, LIU Qihui, et al. Speed sensorless vector control of induction motor based on improved voltage model[J]. Electric Drive, 2015, 45(2): 8-12.
[3] 周亚丽, 李永东, 郑泽东. 基于 M RAS 的感应电机无速度传感器矢量控制[J].电气传动, 2009,39(4):3-8.
ZHOU Yali, LI Yongdong, ZHENG Zedong. Speed sensorless vetctor control of induction motor based on the model reference adaptive system[J]. Electric Drive, 2009, 39(4): 3-8.
[4] R. Kumar, S. Das, P. Syam and A. K. Chattopadhyay, ‘Review on model reference adaptive system for sensorless vector control of induction motor drives’[J].IET Electr. Power Appl., 2015,(7): 496-511.
[5] A. Pal, S. Das, P. Syam and A. K. Chattopadhyay. An Improved Rotor Flux Space Vector Based MRAS for Field Oriented Control of Induction Motor Drives[J]. IEEE Trans. Pow. Electron, 2016(9): 1-10.
[6] R. Saifi, N. Nait-Said, A. Makouf,et al. A new Flux Rotor Based MRAS for sensorless Control of Induction[C]. in 5th International Conference on Systems and Control (ICSC)2016, Cadi Ayyad University,Marrakesh,Morocco, May 25-27, 2016.
[7] 夏益辉,张晓锋,乔鸣衷,等. 改进转速辨识方法用于矩阵变换器交流调速[J].电机与控制学报, 2015,19(11):92-97.
XIA Yihui, ZHANG Xiaofeng, QIAO Mingzhong, et al. Improved speed estimation method applying to AC speed-control of matrix converter[J]. Electric Machines and Control, 2015, 19(11):92-97.
[8] 李晓英,王言徐.应用于变频空调系统的无速度传感器矢量控制研究[J].电气自动化, 2010,37(1):30-32.
LI Xiaoying, WANG Yanxu. Research of speed sensorless vector control applied in variable frequency air conditioner system[J]. Electrical Automation, 2010, 37(1): 30-32.
[9] 熊祥,郭丙君.模糊滑模变结构矢量变频调速系统建模与仿真[J].电气自动化, 2010,32(2):20-22.
XIONG Xiang, YAN Bingjun. Modeling and simulation of vector control and variable-frequency regulating speed system based on fuzzy sliding variable structure control[J]. Electrical Automation, 2010, 37(2): 20-22.
[10] 黄劭刚,宋凤林,洪剑锋,等.基于变参数 MRAS 法的异步电机矢量控制研究[J].微特电机, 2016,44(2):62-66.
HUANG Shaogang, SONG Fenglin, HONG Jianfeng, et al. Induction motor vector control system based on variable parameters MRAS[J]. Small % Special Electrical Machines, 2016, 44(2): 62-66.
On improved speed sensorless vector control strategy of asynchronous machine based on MRAS
ZHAO Longlong, LI Baiyu, CHANG Guoxiang
(Institute of Electrical and Control Engineering, Heilongjiang University of Science and Technology, Harbin 150022, China)
To solve problems about integral initial value and DC drift existed in voltage model flux linkage estimation algorithm of traditional asynchronous machine, a first-order inertial filter is used to replace pure integrator and actual flux linkage is used to go through low-pass filtering in ways to compensate amplitude and phase error caused by introduction of the low-pass filter. An improved speed sensorless vector control system based on MRAS is established by using Matlab software, and the asynchronous machine is driven by simplified three-level SVPWM inverter. The results show that the system features a better consistency, between the estimated speed and the feedback speed during the process of motor starting, lifting speed and loading; speed estimation is of higher accuracy with a better steady-state characteristic and dynamic response ability; a stronger robustness is demonstrated under the given speed variation and load disturbance.
speed sensorless vector control; MRAS; speed estimation; low-pass filter; simplified algorithm based on SVPWM
2017-03-23;
2017-10-17。
国家科技支撑计划项目(2013BAE04B00);黑龙江科技大学研究生创新科研(YJS2017015)。
赵龙龙(1989—),男,硕士研究生,主要研究方向为电力电子与电力传动。
TM 343
A
2095-6843(2017)06-0481-05
(编辑李世杰)