考虑运动受限的履带式移动机器人轨迹跟踪控制
2018-01-05任国全李冬伟
韩 俊,任国全,李冬伟
(军械工程学院 车辆与电气工程系,石家庄 050003)
考虑运动受限的履带式移动机器人轨迹跟踪控制
韩 俊,任国全,李冬伟
(军械工程学院 车辆与电气工程系,石家庄 050003)
针对履带式移动机器人的轨迹跟踪控制问题进行研究,首先,建立了履带式移动机器人的运动学模型和跟踪误差模型;其次,设计了转速有限时间控制和线速度滑模控制的轨迹跟踪控制律,并给出了考虑运动受限作用下的控制律修正表达式;最后,基于MATLAB对所提控制律进行仿真,对比分析了不考虑运动受限情况下跟踪控制效果;结果表明,设计的跟踪控制律能够实现履带式移动机器人对圆轨迹的有效跟踪,且考虑运动受限作用的控制律更加符合实际;文章研究分析了运动受限作用对于移动机器人轨迹跟踪控制的影响,分析结果对其他移动机器人的运动控制研究具有参考价值。
履带式移动机器人;轨迹跟踪;有限时间控制;滑模控制;运动受限
0 引言
近年来,由于良好的地面适应能力,履带式移动机器人在灾难救援、反恐防暴、深海采矿等非结构化环境中应用得越来越广泛,其运动控制的研究也受到人们越来越多的关注[1-3]。在移动机器人的运动控制研究中,轨迹跟踪问题一直是一个的重要课题,很多学者都对移动机器人的轨迹跟踪控制问题进行了深入研究[4-7]。Amidi最早提出了3种比较实用的跟踪控制律[4],并阐述了一种纯追赶(Pure Pursuit)的轨迹跟踪控制方法。该方法设计的控制器较为简单,且跟踪存在较大的稳态误差,控制效果不佳。徐俊艳等采用分层控制的思想[5],将移动机器人的轨迹跟踪控制分为两层,并分别基于Backstepping时变状态反馈方法和Lyapunov理论设计驱动电机转速控制器,实现了移动机器人的轨迹跟踪,并取得了很好的实验效果。该方法要求电机速度跟踪精度较高,且所建模型并未考虑车轮滑转等因素的影响,实际难以调节。骆德渊等针对移动机器人动力学的高度非线性和运动环境的不确定,提出了基于模糊逻辑的移动机器人路径跟踪控制方法[6],方法对于差动转向移动机器人的运动控制具有普适性,但其对较大曲率的轨迹跟踪效果一般。周波等对野外环境下履带式移动机器人的滑动效应进行了建模研究,采用基于SR-UKF的联合估计方法对滑动参数和机器人姿态进行在线辨识和估计,并根据估计的参数设计跟踪控制器,实现了移动机器人的轨迹跟踪控制[7]。该方法考虑到了履带的滑动效应,跟踪控制精度较高,但其滑动参数的估计容易累计误差,需要较高精度的位姿传感器。张扬名等设计了基于有限时间控制的滑模跟踪控制器[8],实现了对轮式移动机器人的轨迹跟踪控制。该方法基于有限时间的控制使得跟踪误差收敛最为理想化,但其并未考虑控制量超过机器人最大限度的问题,即运动受限问题。
所谓运动受限,是指在实际情况下,由于机器人的电机功率、机械结构、地面力学以及保护机器人的要求等等原因,移动机器人不可能以任意大的速度和加速度平动或转动[12]。考虑到移动机器人的运动学约束,引入运动受限策略对移动机器人的跟踪控制律进行修正,对保证机器人的运动平滑是十分必要的。但目前的研究大多忽视了这一约束条件[7-10],或者只考虑到速度约束而没有到考虑加速度受限[11]。
本文对履带式移动机器人的轨迹跟踪控制问题进行研究,首先基于机器人的运动学模型和有限时间控制,设计了机器人的滑模控制器,然后给出了考虑运动受限作用的控制律修正表达式。通过仿真实验,对比分析了考虑运动受限和不考虑运动受限,两种情况下的跟踪控制效果,研究了运动受限作用的影响。
1 运动学模型和跟踪误差模型
1.1 坐标系及运动学建模


图1 坐标系及跟踪误差示意图
根据图1所示,履带式移动机器人的运动学方程可描述为:
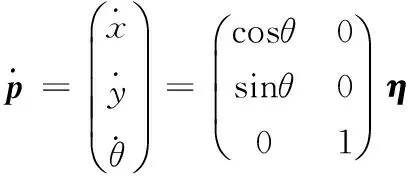
(1)

若履带式移动机器人的两侧履带的主动轮转速分别为ωL和ωR,主动轮半径均为r,履带中心距为B,忽略履带的滑动效应,则有:
(2)
式(1)和式(2)便组成了履带式机器人的简单运动学模型。该模型简单实用,便于运动控制器的设计,是目前应用最为广泛的移动机器人模型。
将式(2)改写为矩阵的形式,可得η=T·u。式中η=(v,ω)T为履带式移动机器人的中间控制输入,u=(ωL,ωR)T为履带式移动机器人的直接控制输入,T为两者的变换矩阵,且:
(3)
由上式,可在求得中间控制输入η后,通过变换公式:
u=T-1·η
(4)
求出履带式移动机器人两侧履带主动轮实际的控制输入(ωL,ωR)T。
1.2 迹跟踪问题的描述及跟踪误差模型

(5)
对 (5) 式两边求导,可得履带式移动机器人轨迹跟踪的误差微分方程为[5]:
(6)
履带式移动机器人的轨迹跟踪控制问题可描述为:在任意初始位姿下,寻求合适的有界控制输入q=(v,ω)T,使得位姿误差向量pe=(xe,ye,θe)T有界,且有:
(7)
2 轨迹跟踪控制律设计
张扬名等[8]针对轮式移动机器人的轨迹跟踪问题,通过设计ω的控制律,使机器人先在有限时间内跟踪到参考轨迹期望的方向,并在确定方向的情况下,通过设计v的控制律,使移动机器人运动到参考轨迹期望的位置。本文参考这个控制律设计的思想,将履带式移动机器人的跟踪控制分为两个部分,分别为角速度有限时间控制律设计和线速度滑模跟踪控制律设计。
2.1 角速度有限时间控制律设计
所谓有限时间控制,就是指在有限时间将系统控制到平衡点。单从系统收敛性能来看,有限时间收敛的控制律是最理想的,但是有限时间系统对应的微分方程常常是分数幂的微分方程,从而导致其稳定性分析十分复杂,因此有限时间控制往往只用于低阶系统。为此,本文先只针对航向角误差θe的一阶系统,进行有限时间控制律设计。首先给出相关引理。
(8)
由式(8)可解得初始状态x(0)≠0时,任意时刻的系统状态变量x(t),系统可在有限时间ts内达到平衡状态x=0,其中:
(9)
考虑到移动机器人的运动学特性,可将移动机器人系统的航向角误差θe按照引理中的一阶系统设计有限时间控制律进行镇定。这里选择ω的控制律为:
(10)
其中:θe为状态变量,α>0,p、q为正奇数且p (11) 由引理可知,θe可在ω的控制律(10)的作用下在有限时间ts内达到θe=0的平衡态,而此时有ω=ωd。可以求得: (12) 这样就完成了航向角θ和期望角速度ωd在有限时间内的跟踪控制。 对履带式移动机器人轨迹跟踪系统(6)式而言,在角速度有限时间控制律(10)的作用下,只要时间t>ts,则就有θe=0,ω=ωd,这时就只需考虑xe和ye这两个状态误差的控制律设计,此时有: (13) 针对式(13)描述的系统,现需要使用滑模控制技术来设计v的控制律。设计步骤如下: 1)切换函数设计。 可设计切换函数为: s=xe-ye (14) 通过设计滑模控制律,使s→0,即使xe收敛到ye,可实现ye→0和xe→0。证明如下: 证明:当xe=ye时,考察Lyapunov函数: (15) 对上式求导可得: (16) 当且仅当xe=ye=0时式(16)右端取等号,因此可以得出结论:当xe与ye相等时,系统状态ye收敛到0,从而xe也收敛到0。 2)选择滑模趋近律。 选择等速趋近律,令: (17) 为减弱抖振,采用连续函数代替符号函数: (18) 3)滑模控制律设计。 由式(13)和式(14),可得: (19) 整理可得线速度v的控制律: (20) 以上各式中,k、δ均为大于0的常数。 需要指出的是,线速度v的控制律(20)是在航向角误差取0的条件下得到的,因此只有在θ→0的情况下,线速度v的控制律才开始发挥作用。 这里假设履带式移动机器人运动时最大的转向角速度和线速度分别为ωmax和vmax,相应的最大加速度分别为βmax和amax,则根据式(10)和式(20)可对移动机器人的跟踪控制律给出如下修正表达式: (21) (22) 为验证轨迹跟踪控制器的有效性,并考察运动受限作用对轨迹跟踪控制效果的影响,在Matlab环境下,对履带式移动机器人进行了圆周轨迹跟踪的仿真实验。 跟踪的参考轨迹为线速度和转动角速度均为匀速的圆轨迹。取期望的参考速度vd=1.5m/s,ωd=0.6rad/s,设置速度限制为ωmax=0.8rad/s,vmax=4m/s,加速度限制为βmax=15rad/s2,a=20m/s2。圆轨迹半径r=vd/ωd=2.5m,则参考圆轨迹位姿pd=(xd,yd,θd)T为: (23) 设履带式移动机器人的初始位姿为(1,1,0),初始运动状态为(v0,ω0)T=(1,0)T。控制参数取α=6,p=9,q=11,k=2,δ=0.02。则采用控制律(10)和(20)的不考虑运动受限的跟踪控制,同采用控制律(21)和(22)的考虑运动受限的跟踪控制的仿真结果对比如图2~图6(每组图的(a)图为不考虑运动受限的情况,(b)图为考虑运动受限的情况)。 图2 跟踪轨迹对比图 图3 跟踪状态误差变化曲线图 图4 两侧履带主动轮转速变化曲线图 由以上的仿真结果,对履带式移动机器人在考虑运动受限和不考虑运动受限两种情况下的轨迹跟踪讨论分析如下: 1)由图2、3可知,两种情况下,履带式移动机器人通过本文设计的跟踪控制律,均可快速有效地跟踪上参考圆轨迹,且相对位置误差均只有一次超调; 2)由图2可以看出,考虑运动受限的图2(b)在跟踪刚开始时的轨迹更加平滑,但轨迹跟踪的超调量也更大。这是因为在运动受限作用下,移动机器人的运动速度变化的剧烈程度也相应降低。 3)由图3可知,两种情况下方向角误差θe都非常很快地趋于零,这表明有限时间控制律能够使机器人在很短的时间内跟踪上期望的航向角,这对于航向角跟踪要求较高的场合非常适用; 4)由图3可以看出加入运动受限策略后,对移动机器人跟踪控制精度影响不大,但超调量更大,完全跟踪上参考圆轨迹的时间更长。这是因为运动受限作用使得机器人达不到原控制所需的控制速度,跟踪的速度必然相应的变“慢”。 5)由图4(b)可明显的看出,左右主动轮转速出现上限而不再继续增大。这是因为在控制过程中触发了运动受限的条件,移动机器人已经达到了其运动的极限。因此图4(a)中的跟踪状态是以超过机器人的运动极限为前提的。由此可以看出,引入运动受限策略是十分必要的,也是更加符合实际的。 运动受限作用是移动机器人运动控制过程中一项基本的约束,然而很多运动控制器的设计都忽略了运动受限作用。本文对履带式移动机器人的轨迹跟踪控制问题进行了研究,设计了履带式移动机器人转向角速度的有限时间控制律和纵向线速度的滑模控制律,并着重对比分析了考虑运动受限作用和不考虑运动受限作用下对于参考圆轨迹的跟踪控制效果。讨论分析的结果表明: 1)本文设计的轨迹跟踪控制律,可实现移动机器人对参考轨迹的有效跟踪; 2)运动受限作用使得移动机器人的跟踪轨迹更加平滑; 3)有限时间控制律对于航向角跟踪要求较高的场合十分适用; 4)运动受限作用并不影响跟踪控制的跟踪精度,但会增加控制时间; 5)在移动机器人跟踪控制器设计的过程中,考虑运动受限作用是防止机器人超过其运动极限的必然要求。 [1] 王仲民. 移动机器人路径规划与轨迹跟踪[M]. 北京: 兵器工业出版社, 2008. [2] Kabanov A, Kramar V. Modeling and Control of Tracked Mobile Robot[J]. 2012. [3] Moosavian S A A, Kalantari A. Experimental slip estimation for exact kinematics modeling and control of a Tracked Mobile Robot[C]. 2008. [4] Amidi O. Integrated Mobile Robot Control[R]. Carnegie Mellon University, Robotics Institute, 1990. [5] 徐俊艳,张培仁,程剑锋. 基于Backstepping时变反馈和PID控制的移动机器人实时轨迹跟踪控制[J]. 电机与控制学报,2004(1):35-38. [6] 骆德渊,刘 荣,李纪文. 采用模糊逻辑的移动机器人轨迹跟踪[J]. 电子科技大学学报, 2008,37(6):943-946. [7] 周 波,戴先中,韩建达. 野外移动机器人滑动效应的在线建模和跟踪控制[J]. 机器人, 2011, 33(3): 265-272. [8] 张扬名,刘国荣,杨小亮. 基于滑模变结构的移动机器人轨迹跟踪控制[J]. 计算机工程,2013,39(5):160-164. [9] 李会来,李小民,陈静华. 非完整移动机器人轨迹跟踪自适应控制器设计[J]. 传感器与微系统,2011,30(5):104-106. [10] 王 静,蒋 刚. 基于EKF和Lyapunov函数的移动机器人轨迹跟踪控制[J]. 机床与液压, 2013(6). [11] 阎世梁,张 华. 基于预测控制的全向移动机器人轨迹跟踪[J]. 计算机测量与控制,2010,18(10):2281-2284. [12] 张兴会,王仲民,邓三鹏,等. 基于控制Lyapunov函数的履带式移动机器人轨迹跟踪[J]. 制造业自动化,2011,33(1):202-203. Trajectory Tracking Control for Tracked Mobile Robot with Moving Limitation Han Jun, Ren Guoquan, Li Dongwei (Vehicle and Electrical Engineering Department, Ordnance Engineering College, Shijiazhuang 050003, China) To solve the trajectory tracking control problem of tracked mobile robots, firstly, the kinematic model and error model were established. Secondly, a finite-time controller of turning velocity and a sliding model controller of longitudinal velocity were designed for trajectory tracking, and the moving limitation expressions was given as well. Finally, based on Matlab, the simulation comparison results of the designed controllers with moving limitation and without moving limitation were analyzed. And the results show that the designed controller can track the reference circle trajectory effectively, and the controller with moving limitation is closer to fact. The paper studies and analyzes the influence of moving limitation on the trajectory tracking control of a mobile robot, and the analysis results have reference value for the motion control of other mobile robots. tracked mobile robot; trajectory tracking; finite-time control; sliding model control; moving limitation 2017-03-01; 2017-03-15。 武器装备预研基金(714005798)。 韩 俊(1991-),男,安徽阜阳市人,硕士研究生,主要从事地面无人平台技术方向的研究。 1671-4598(2017)12-0086-04 10.16526/j.cnki.11-4762/tp.2017.12.023 TP242 A2.2 线速度滑模变结构控制律设计

3 运动受限作用

4 仿真结果与分析



5 总结
