磁导航AGV分段模糊PI控制器设计*
2018-01-04,,,
,,,
(1.广东工业大学 机电工程学院,广州 510006;2.东莞台一盈拓科技股份有限公司)
磁导航AGV分段模糊PI控制器设计*
马平1,肖全1,邝锦祥2,张智阳1
(1.广东工业大学 机电工程学院,广州 510006;2.东莞台一盈拓科技股份有限公司)
为了提高3C产品的自动化生产效率,以STM32F407ZGT6单片机为系统控制器核心,对磁敏传感器组寻迹的滚筒式AGV设计了16位磁敏传感器的阵列布置形式,并根据此形式以及磁导引滚筒式AVG的寻迹约束条件和行走要求提出了路径的识别与轨迹跟踪算法,即分段模糊PI控制算法,以适应AGV小车在直行、转弯和停车三种状态下存在的位置偏差和角度偏差的控制。运用Matlab软件中Simulink模块搭建模糊控制器的仿真模型,对AGV的轨迹跟踪进行仿真,并进行了实际行走测试。AGV行驶时路径偏差保持在8 mm以内,可保证AGV稳定准确地跟踪预设路径,且具有较强的鲁棒性。
STM32F407ZGT6;AGV;磁导航;分段;模糊控制
引 言
AGV在工业自动化生产线中适应性、柔性好,可稳定实现生产和搬运功能,因此被广泛应用[1]。为解决AGV小车的鲁棒位置偏差控制问题,模糊控制也被广泛使用[3-4],但模糊控制器难以根据系统特性进行自适应的调整,容易产生稳态误差。国内方面,参考文献[5]提出基于PLC系统的PID控制在仿真和实验分析,但是具有编程不灵活、价格过高等缺点。本文以磁条作为导引路径,以STM32F407ZGT6单片机作为控制核心,提出了一种集模糊控制与PI控制于一体的分段模糊PI控制算法,解决了滚筒式AGV在自动化生产线中路径的准确识别与快速跟踪精度不高的问题,使得AGV在工业自动化生产线中能够以高精度稳定运行。
1 AGV的基本结构分析
1.1 AGV的结构模型
文中所讨论的为差速六轮滚筒式AGV,要求车身尺寸为1 100 mm×677 mm×660 mm,最大载重为150 kg,稳定行驶时保证路径偏差小于8 mm、停车误差不超过5 mm。磁传感器采集的偏差和驱动轮中心与磁条偏差同步,轮系由车体中间两个驱动轮和四个万向轮组成,以此来增强AGV的灵活性。文中磁敏传感器为16位NPN型开关量传感器,当磁敏传感器相应的位检测到磁条的有效信号时,该位输出高电平,位与位之间的距离L=10 mm,若中间4个磁敏传感器同时输出高电平,则表明传感器在预设的路径中心正上方。磁敏传感器组在AGV小车中的具体布置结构模型如图1所示。

图1 AGV小车的结构模型
图1中,d为AGV小车在行驶过程中磁传感器获得的路径中心相对磁条的偏移量,即位置偏差;α为磁传感器感知的路径中心相对于预设路径中心线的偏转角,即角度偏差;在AGV行驶过程中,角度偏差很难通过测量获得,但可通过磁传感器的磁信号进行一些数据转换后,得到角度偏差的数值。
1.2 磁条中心位置检测
AGV在运动过程中,磁条与传感器的相对位置会出现3种情形:① 磁条被传感器完全覆盖,此时磁条中心位置是传感器连续获取信号的中心。② 磁条处于传感器边缘,若此时传感器上检测到磁信号的位数少于3,则自动补齐传感器外面的位,使有效位数为4,然后再计算磁条中心位置。③ 磁条超出了传感器的感应距离,传感器丢线,此时沿用丢线之前的磁条中心位置作为当前采样周期的磁条中心位置,若连续丢线达到一定次数,则认为AGV失去自导引能力。
1.3 有效磁条选择
AGV在前进过程中,同一时刻可能会检测到多块磁条的存在:① 车子处在无分叉路段,则会比较当前所有磁条的中心位置,从多块磁条中选择中心位置最接近历史位置的一块磁条作为有效磁条。② AGV进入分岔路段,则会根据RFID标签信号选择靠近分岔方向的那块磁条作为有效磁条,并将其中心位置视为检测到的路径中心位置。
1.4 路径跟踪
路径跟踪过程是单片机接收RFID读卡器发送过来的RFID标签号,并据此判断AGV当前的位置(根据位置信息执行直行、转弯、加减速、装工件、卸工件等动作),以及何种路径跟踪模式,并可依据位置偏差d和角度偏差α计算出转向轮的转向角。RFID即射频识别技术,无需接触即可通过RFID卡获取小车位置信息,完成信息输入和处理。AGV行进的最基本控制算法都是基于位置式数字PID控制,其输出如下:

式中Kp、Ki和Kd分别为比例、积分、微分系数,ej(0≤ej≤n)为第j次采样的偏差,Un为第n次采样偏差输入后的控制器输出。
针对3C产品的自动化生产,AGV在其中的任务是物料的自动配送供给,主要流程为:现场生产管理系统根据任务要求规划AGV的行车路线后发送相应的指令给AGV小车,小车从仓库中将工件毛坯沿着规划好的路径运送至相应的工位进行一系列的机加工和视觉检测,最后再将加工完的成品运送至成品仓库等待下一任务指令。其中,AGV在直线轨道以高速前进,保证生产高效;在转弯轨道以中速前进以保证运行稳定;在加工和检测工位前慢速停车以保证与接驳台精准对接。轨迹跟踪控制器的精度直接关系到AGV小车的安全性和可靠性。控制器的使命就是要实现轨迹的精确控制,保证小车按预定轨迹安全行驶,消除位置偏差和角度偏差。
在实际使用过程中,目前大多应用PID控制器的AGV小车,轨迹跟踪能力只能在一定的范围内有效。当初始偏差角度较小时,小车能在短时间内纠正并消除角度和位置偏差,并且消除过程收敛曲线平滑,稳态误差也保持在较小的区间内,可以满足AGV小车的在轨迹跟踪要求不高的场合使用。在3C产品自动化生产车间的实际使用过程中,小车的行驶轨迹环境比较复杂,对接精度要求较高,此时PID控制器的效果就很难满足自动导航车的轨迹跟踪要求,无法快速消除位置偏差和角度偏差,使整个系统无法正常运行。所以针对AGV在生产线中三个阶段三种速度的行进特性,提出了分段模糊PI控制。
1.5 AGV运动模型建立
假设经过一小段时间t,自动导航车运行时出现了位置偏差d和角度偏差α,则偏差方程为:
经过计算,并对式(2)和式(3)的时间进行左右分别求导,就可得出两偏差的相对应的变化率为:
由上式可以得出AGV小车的空间状态方程为:
其中,R为自动导航车的运动半径(即转弯半径),D为两轮轴间距(单位为m),Δt为采集周期(单位为s),Vl与Vr为左右轮线速度(单位为m/s)。
通过统计出系统的输入端以及输出端的大量数据,根据多目标的改进自适应遗传算法[6],得到了系统数学模型,其传递函数为:
将磁传感器采集的位置偏差d和角度偏差α作为输入量,输出则为两轮的速度差ΔV,最终推导出整个系统的状态方程为:
在运动模型的基础上建立了AGV的空间状态方程,得到了自动引导车较为理想的驱动系统数学模型的传递函数,为后续小车的路径跟踪仿真研究奠定了基础。
2 分段模糊PI控制
2.1 分段模糊PI控制器的结构
单纯的模糊控制系统中缺少积分控制模块,因此系统存在稳态误差,而PID控制是基于精确的数学模型,AGV在生产车间系统环境复杂,存在着非线性、滞后、时变、参数未知以及各种干扰等,导致控制不足,因此要寻找更为合适的控制算法来满足生产线的控制要求。分段模糊PI控制器是在常规模糊控制器模型基础上设计的,当输入量发生改变时,控制系统会通过转换开关动态的选择对应的模糊控制器来控制其输出量[7]。
分段模糊PI控制器的设计原理是:将输入量的大小分成几个区间,输入量经过模糊化处理后在相互独立的常规模糊控制器1,2,…,N中选择对应的模糊控制器映射到对应的模糊规则库的对应规则上。其原理图如图2所示。

图2 分段模糊PI控制器原理图
分段模糊PI控制相比PID控制,不需要对比例积分微分参数整定,从而减少了工作量;相比模糊控制,都不需要控制对象的精确数学模型;由于模糊控制器的控制规则和模糊输入变量论域相互独立,在较大范围的输入量时,可有效避免输入与控制规则映射不完全的问题,相比常规模糊控制器输出量精度也会大大提高。
2.2 轨迹跟踪状态标量模糊化
将偏差error和偏差变化率change_in_error作为小车的模糊控制器的两个输入变量,速度差Vf作为输出变量,其中偏差error由角度偏差α和位置偏差d组成。选择权重函数为ek进行归一化处理得到偏差error,其中α的权重为k,d的权重为(1-k),而偏差变化率为change_in_error,即ec:
借用分层理论的方法来确定输入变量的变论域的伸缩因子。随着ek和ec变化,输入、输出的论域向中心收缩或向向外膨胀成矩形或正方形。设[-E,E]、[-Ec,Ec]和[-F,F]分别为ek、ec和Vf的论域,输入、输出论域的伸缩因子为[8-9]:
其中0<τ1,τ2<1。把输入变量和输出变量分别转化到论域为[-6,6]的模糊集E、 Ec和F。输入和输出变量的模糊子集语言变量设置为{nl, nm, ns, zo, ps, pm, pl},其模糊子集的隶属度函数取高斯函数和三角函数,如图3所示。
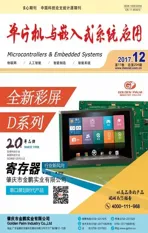
根据1.5节中建立的空间状态方程在Matlab/Simulink平台上搭建AGV的仿真模型,其仿真结构图如图4所示。“Fuzzy Logic Controller”模块分别为常规模糊控制器a,b,c,当输入量不同时,“switch2”模块选择对应的模糊控制器。模糊控制器a,b,c的设计原理一致,只是论域有所改变。模糊控制器的规则语句描述模型是:
if(Error is A) and (Change_in_error is B) then(Vfis C)
通过总结归纳经验使用常用的一种模糊控制规则,在Matlab/Fuzzy Logic Controller模块中建立了对应模糊控制器的fls模型和模糊控制器的规则参数表,得到模糊控制器的规则曲面如图5所示。
3 仿真结果及分析
为了验证分段模糊PI模糊控制器的有效性和优越性,首先对采用模糊控制和分段模糊PI模糊控制的控制效果进行了对比分析,根据式(6)搭建的自动导航车的仿真模型进行仿真分析。设置小车的初始角度偏差为4°,而设置位置偏差初始值为-0.4 m,权重k=0.35,τ1=τ2=0.9。分别得到图6和图7所示的角度偏差和位置偏差的响应对比图。

图3 输入输出的隶属度函数
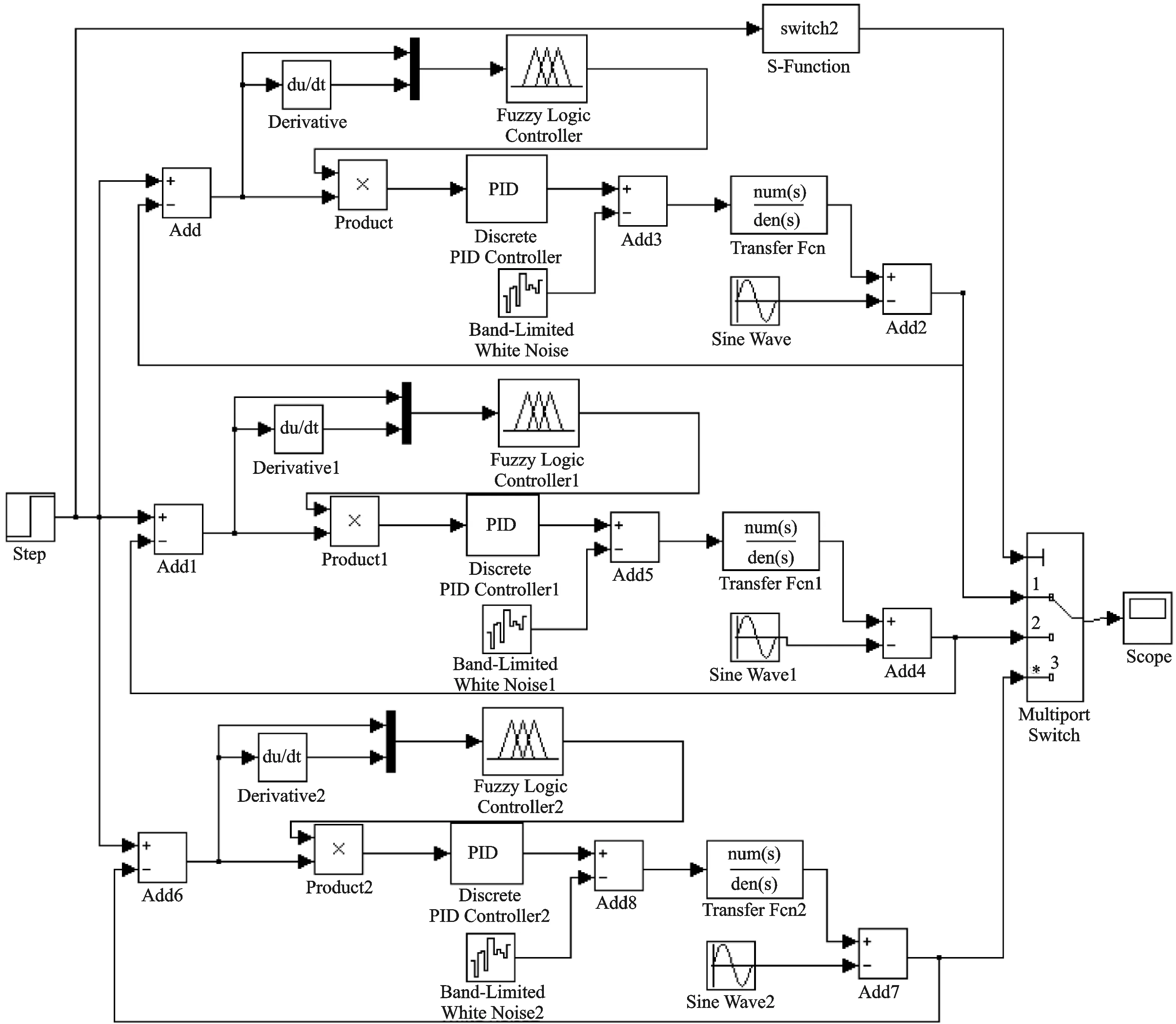
图4 分段模糊 PI 控制器仿真结构图

图5 模糊控制器规则曲面图
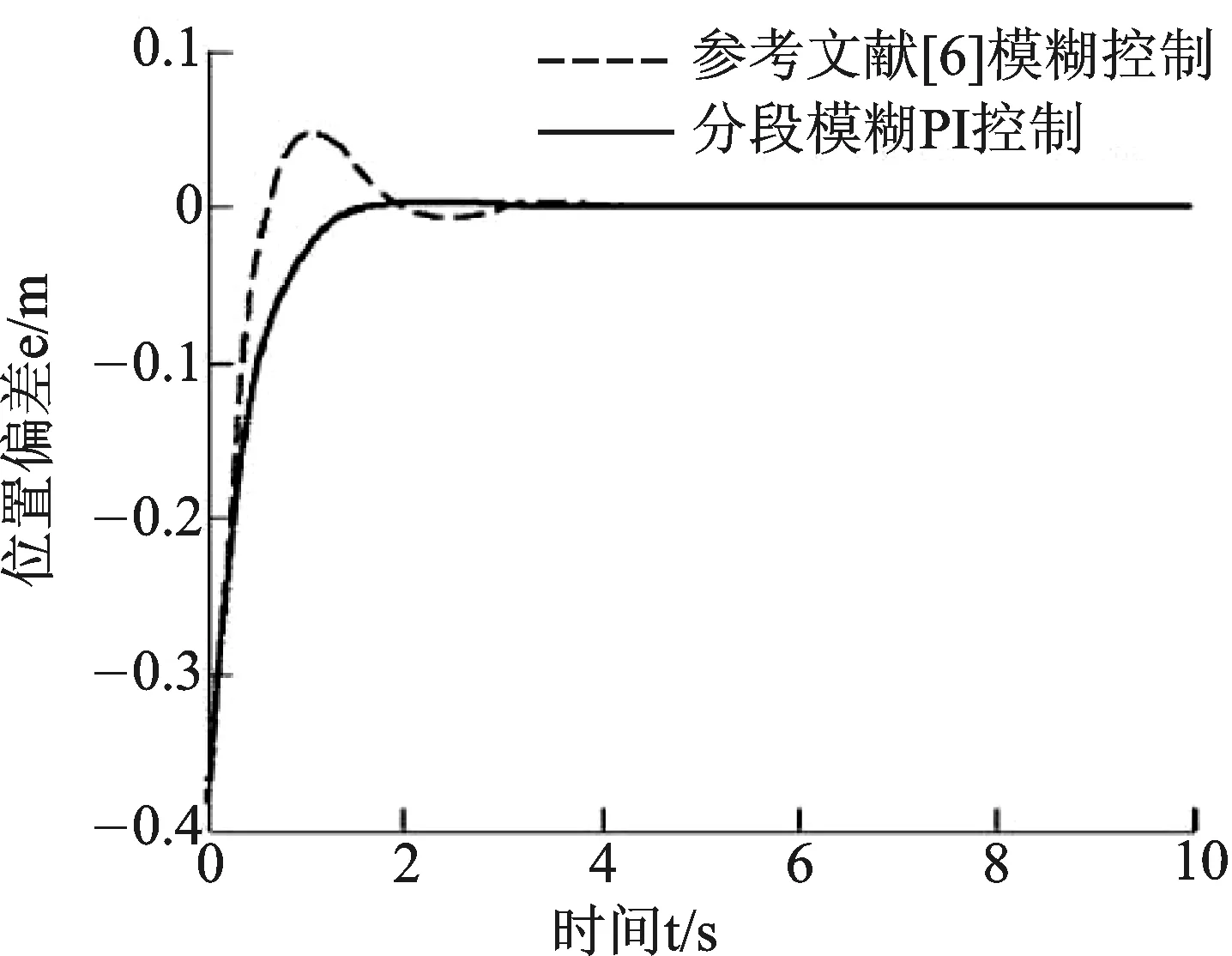
图6 位置偏差响应对比图

图7 角度偏差相应对比图
由于设置的初始偏差角度为4°,图6和图7中的仿真结果表明,在有干扰信号下AGV的运行轨迹在2 s左右自动调整位姿,从偏移位置调整到磁条轨迹并稳定运行,能够看出该控制器系统超调量极小,而且响应速度较快。
4 实验测试
为了测试分段模糊 PI 控制器在AGV小车上的性能,检验仿真结果、结构布局和软件设计是否合理,结合设计数据搭建了AGV硬件平台,分别铺设了直线磁轨道和环形磁轨道进行测试,测试的路径示意图如图8(a)~图8(c)所示。

图8 AGV的直线、转弯、停车测试
经过多次测试,在走直道过程中,速度为0.7 m/s时,AGV会有轻微震荡,横向位置偏差在8 mm以内。过弯道时,速度为0.34 m/s,转弯半径为1.25 m,横向位置偏差稳定在8 mm以内,但震荡频率相对走直道略高。以0.17 m/s的速度停车时,与目标停车点的偏差在5 mm以内,横向位置偏差试验曲线如图9所示。
图9 横向位置偏差试验曲线
实验结果表明,AGV小车能沿着铺设的磁条稳定直行和转弯,在指定的工位稳定停车执行工件装卸动作,横向偏差的变化过程也与实际的纠偏过程吻合,表明基于STM32的分段模糊PI控制器的跟踪性能稳定准确,能够满足3C自动化生产线的要求。
结 语

[1] Peters B,Smith J,Venkatesh S. A Control Classification of Automated Guided Vehicle Systems[J]. International Journal of Industrial Engineering,1996,3(1):29-39.
[2] CREMEAN L B, FOOTE T B. Alice:An information-rich autonomousvehicle for high-speed desert navigation[J]. Journal of Field Robotics, 2006,23(10): 777-810.
[3] YANG J, ZHENG N N. An expert fuzzy controller for vehicle lateral control[C]//IEEE Conference on Industrial Electronics Society, November 5-8, 2007, Taipei,Taiwan, China, 2007: 880-885.
[4] RAIMONDI F M, MELLUSO M. Fuzzy motion control strategy for cooperation of multiple automated vehicles with passengers comfort[J]. Automatica, 2008, 44(11): 2804-2816.
[5] 黄胃.基于PLC控制的AGV技术研究及其应用[D].上海:华东理工大学,2013.
[6] 程航.AGV小车轨迹跟踪控制策略的研究[D].合肥:合肥工业大学,2016.
[7] 分段模糊PI控制在无刷直流电机中的应用研究[D].合肥:安徽农业大学,2013.
[8] 李洪兴.模糊控制的插值机理[J].中国科学,1998,28(3):259-267.
[9] 李洪兴.从模糊数学本质看模糊逻辑的成功-关于“关于模糊逻辑似是而非的争论”的似是而非的介入[J].模糊系统数学,1995,9(4):1-14.
[10] 郑炳坤,赖乙宗,叶峰.磁导航AGV控制的设计与实现[J].自动化与仪表,2014(3):6-10.
马平(教授),主要研究方向为高速数控机床关键技术、自动化装备;肖全(硕士研究生),主要研究方向为机械自动化装备、AGV控制系统的开发。
PiecewiseFuzzyPIControllerDesignofMagneticNavigationAGV
MaPing1,XiaoQuan1,KuangJinxiang2,ZhangZhiyang1
(1.Faculty of Electrical and Mechanical Engineering,Guangdong University of Technology, Guangzhou 510006,China;2.Dongguan Wintop Tech Co.,Ltd.)
In order to improve the efficiency of the automated production of 3C product,an array arrangement for sensors about the 16 position magnetic sensor group tracing cylinder sensor of the AGV is designed,which uses STM32F407ZGT6 microcontroller as the core of the system controller.A path identification and trajectory tracking algorithm on the basis of the form are proposed.By using the subsection fuzzy PI control method,the position deviation and angle deviation of the AGV trolley in the three states of straight-line,turning and parking can be controlled.Then the Simulink module is used to build a simulation model of the fuzzy controller to simulate the trajectory tracking of the AGV.Eventually an actual walking test is carried out.The AGV can be kept within 8 mm and can stably track the reference path under various conditions with high accuracy and robustness.
STM32F407ZGT6;AGV;magnetic navigation;piecewise;fuzzy control
国家自然科学基金(50775043);粤港关键领域重点突破项目(TC08BE33-2)。
TP273
A
杨迪娜
2017-08-07)