基于AHP-Fuzzy和激光点云数据的公路边坡危险性评估研究*
2018-01-04刘洋洋李永强郭增长李有鹏
刘洋洋,李永强,郭增长,李有鹏
(河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
基于AHP-Fuzzy和激光点云数据的公路边坡危险性评估研究*
刘洋洋,李永强,郭增长,李有鹏
(河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
针对目前公路边坡危险性评估大多侧重于判断危险等级,很少深入研究其中具体危险点的问题,提出一种基于AHP-Fuzzy和激光点云数据的公路边坡危险性综合评估方法。该文先根据地质条件将公路边坡划分为若干路段,再采用AHP-Fuzzy评价法对各路段边坡进行整体评估,确定危险边坡;然后利用车载LiDAR系统获取各危险边坡两期激光点云数据,构建DEM模型,并使用色谱分析法对两期模型进行局部评估,找出具体的危险点;最后结合专家意见,定性判断危险路段可能发生的灾害类型,并提出相应的防治建议。以重庆市某公路为例,采用新方法进行评估实验。结果表明,研究区4、8、10号路段危险性较大,易发生滑坡、崩塌灾害,建议采取及时的防治措施。与传统方相比,该方法既能确定危险边坡,又能找出其中的具体危险点,为公路边坡防灾减灾研究开辟了一种新思路。
公路边坡;危险性评估;AHP-Fuzzy评价法;车载LiDAR系统;激光点云数据;防灾减灾
随着我国经济建设的飞速发展,以公路、铁路等为主的国家基础建设也取得了丰硕成果,但同时也出现了诸多问题。由于公路独特的线状特征,导致在开挖过程中形成了大量的人工边坡,虽然在工程建设中已经对这些边坡采取了防护措施,但由于公路沿线地质环境复杂多变,所以仍然存在着很多隐患,滑坡、崩塌等灾害频频发生,给公路交通和人民安全造成了严重威胁,因此,针对公路边坡进行危险性评估具有重大的实际意义[1-2]。公路边坡的稳定性及危险性评估是近年来国内外专家学者持续关注的研究热点,国外方面,土耳其的Teoman M B利用极限平衡法和有限差分法对安卡拉E90公路沿线某土质边坡进行了稳定性评估[3];印度的Gortmaker S L则采用赤平投影方法和滚石数值模拟软件对马哈拉施特拉邦某公路边坡进行稳定性分析[4];相比国外专家,国内学者对该领域也有较多研究,如何锋利用神经网络法建立了边坡稳定性评价的神经网络BP模型,并对桂林至柳州一级公路中K250段公路边坡进行了稳定性评价[5];张菊连运用Logistic逐步回归遴选边坡影响因子,建立了边坡稳定性评价的Logistic回归模型[6];柳厚祥将模糊聚类理论与模糊模式识别结合起来,建立了公路边坡稳定性模糊聚类迭代评价模型[7];王卫东运用GIS技术将地质灾害宏观区划与单体边坡稳定性分析以及监测预警相结合,构建了公路边坡信息管理系统等[8]。在国内外专家的不懈努力下,公路边坡的危险性评估研究取得了很大进展,但依然存在一些亟待解决的问题,如目前大多公路边坡危险性评估在确定边坡危险等级后,针对危险性较大的边坡,很少深入研究其中具体哪一点或者哪个区域比较危险,而这些信息都是公路部门制定边坡防灾减灾方案时所迫切需求的关键信息。针对此点,本文提出了一种新的公路边坡危险性评估方法,该方法利用AHP-Fuzzy法、车载LiDAR系统、DEM建模技术及色谱分析法等对公路边坡进行由整体到局部、由面到点的综合评估,目的是判断研究区各路段边坡危险等级,确定危险性较大的边坡,并找出其中的危险点,最后基于评估结果、实地考察情况和专家意见,定性判断危险路段可能发生的灾害类型,为公路部门制定防灾减灾方案提供具有针对性和实用性的决策支持。最后,以重庆市319国道某段公路为例,采用新方法进行应用研究。
1 关键技术与方法
1.1 AHP-Fuzzy法
AHP-Fuzzy法,是一种将层次分析法(AHP)和模糊评价法(Fuzzy)结合使用的综合评价方法[9-10]。其中,AHP法(Analytical Hierarchy Process)即层次分析法,是美国著名运筹学家satty教授于1973年提出的一种多目标多准则权重计算方法,该方法能有效实现定量和定性综合评价,适用于一些结构庞大、准则较多且不易量化的复杂问题,其基本原理是把问题层次化,即将一个复杂问题简化为总目标(最高层)与决策方案(最底层)之间相对重要性及权值确定的排序问题[11]。模糊评价法是一种对受多种模糊因素影响的复杂事件进行综合评价的数学方法,该方法采用模糊数学理论来分析下级因素对上层事件的影响情况,通过层层递进,最终求出各个因素对总目标的影响状态[12-14]。在实际应用中,模糊评价法的指标权重一般由专家学者主观判断得出,其评价结果具有一定的模糊性和主观性,而层次分析法是将人的主观判断用数值形式进行表达的定量分析方法,它能有效降低个人主观臆断所造成的不确定性和模糊性,因此将模糊评价法和层次分析法进行有机结合,各取长处,互补互助,可最大程度地减少评价结果的主观性和模糊性,提高其客观性和准确性。该方法详细计算步骤如图1所示。
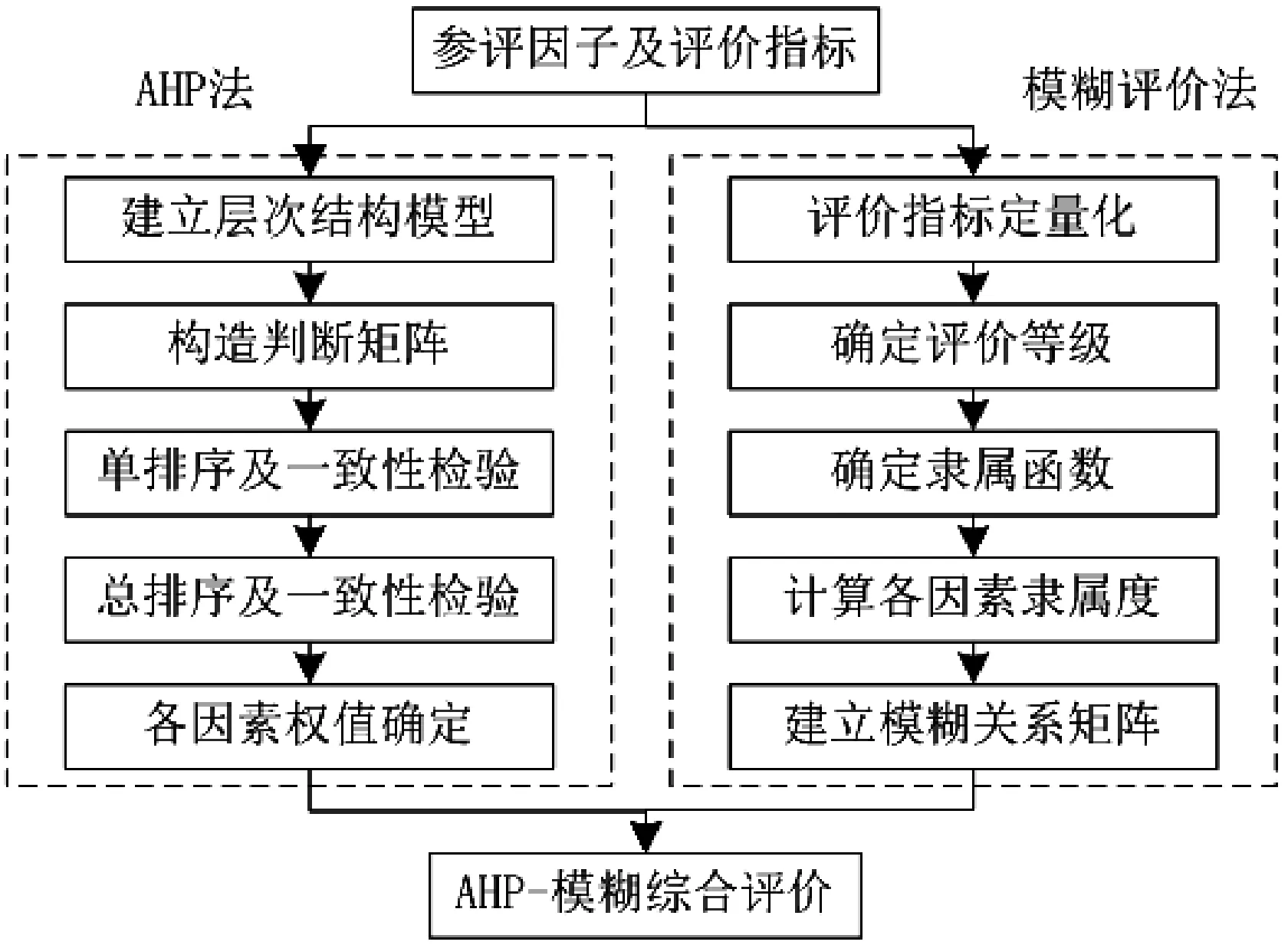
图1 AHP-Fuzzy综合评价法
1.2 车载LiDAR系统
车载LiDAR(Light Detecting And Ranging)系统是一种集成了多个高端传感器的、能在行驶过程中动态采集车辆两侧目标物表面三维信息的高性能移动数据采集系统。在大型机动车的基础上,其主要装载了GPS定位系统、激光扫描仪、CCD相机、里程计、IMU惯性导航测量单元以及控制装置等先进仪器设备[15-16]。车载LiDAR系统采集的数据信息是海量的三维数据点云,包括数据的回波强度、灰度值以及三维坐标等关键信息,具有离散性、盲目性和海量性等特点[17-18],该系统在采集公路边坡数据时具有先天的优势,主要体现在以下几个方面:①采集效率高、机动性强;②外业劳动强度低、自动化程度高;③信息量丰富、测量精度高。
1.3 色谱分析法
色谱分析法的核心思想是对构建的两期公路边坡DEM(数字高程)模型进行对比分析,并将某一坐标轴(x,y,z)方向上的边坡位移形变分量按照其数值大小依次设定为不同的颜色,每个颜色代表一个位移形变范围,从而形成一个边坡位移形变情况的可视化整体色谱图,通过色谱图中可以清晰地看出公路边坡的整体形变位移状态,并从中找出边坡位移较严重的点或区域,即边坡危险点。同时,对于危险点或区域,可定量计算其在各空间坐标方向上的变形量。色谱图上每个颜色所代表的形变范围可根据实际情况按需设定,一般用暖色调表示正向变化,用冷色调表示负向变化[19-20]。
2 应用研究
2.1 研究区概况
结合论文研究目的,本文选择重庆市境内319国道某路段作为研究区域,该路段长约32 km,建成于1988年,已运营29年,属于国家一级公路,公路沿线为山区丘陵地形。据历史记载,该路段曾发生多起边坡灾害,属于公路部门重点监管区域,尤其是近期暴雨天气频频出现,该区域滑坡、泥石流灾害也随之增多,给交通安全造成了严重威胁。
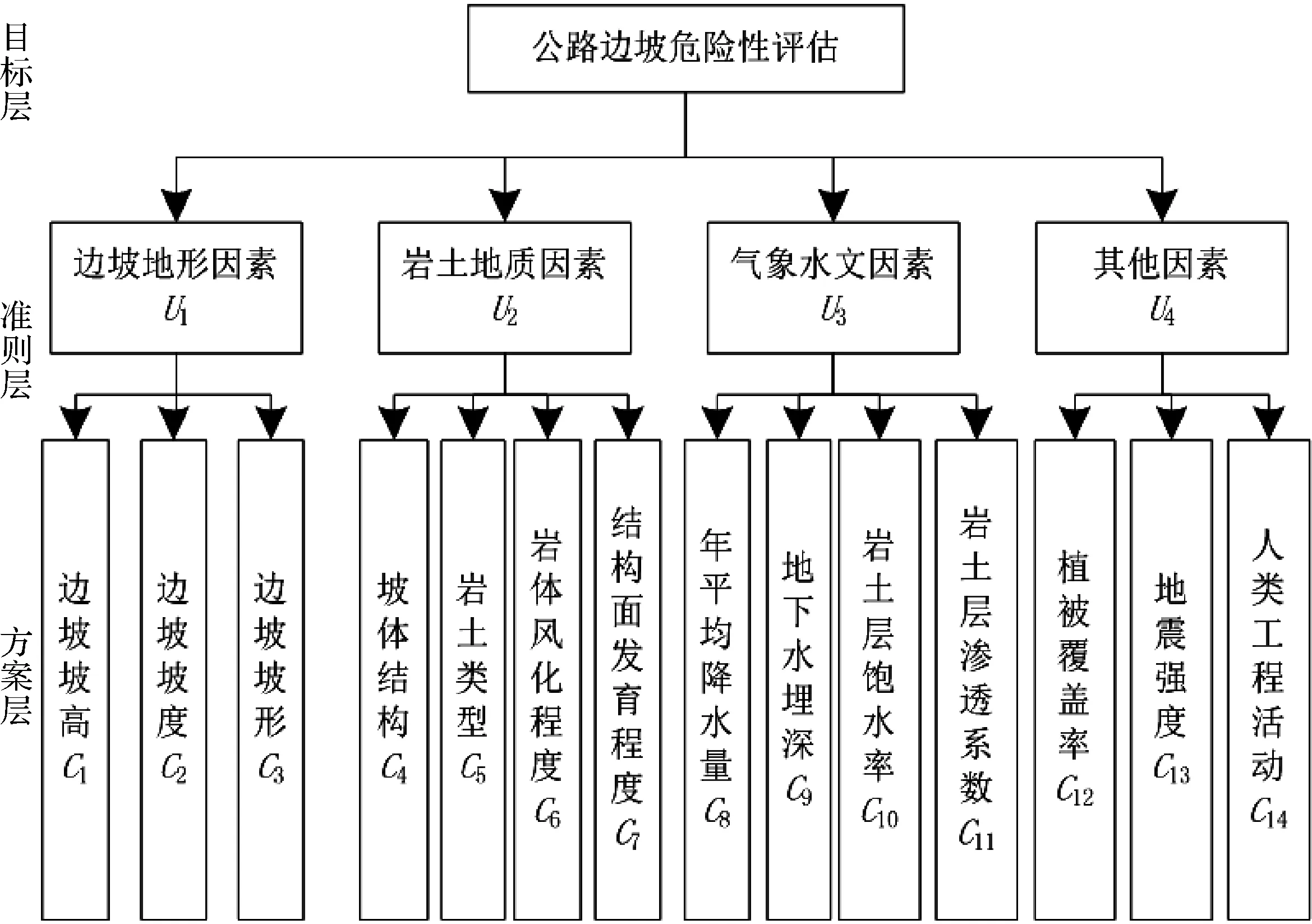
图2 公路边坡危险性评估层次结构模型
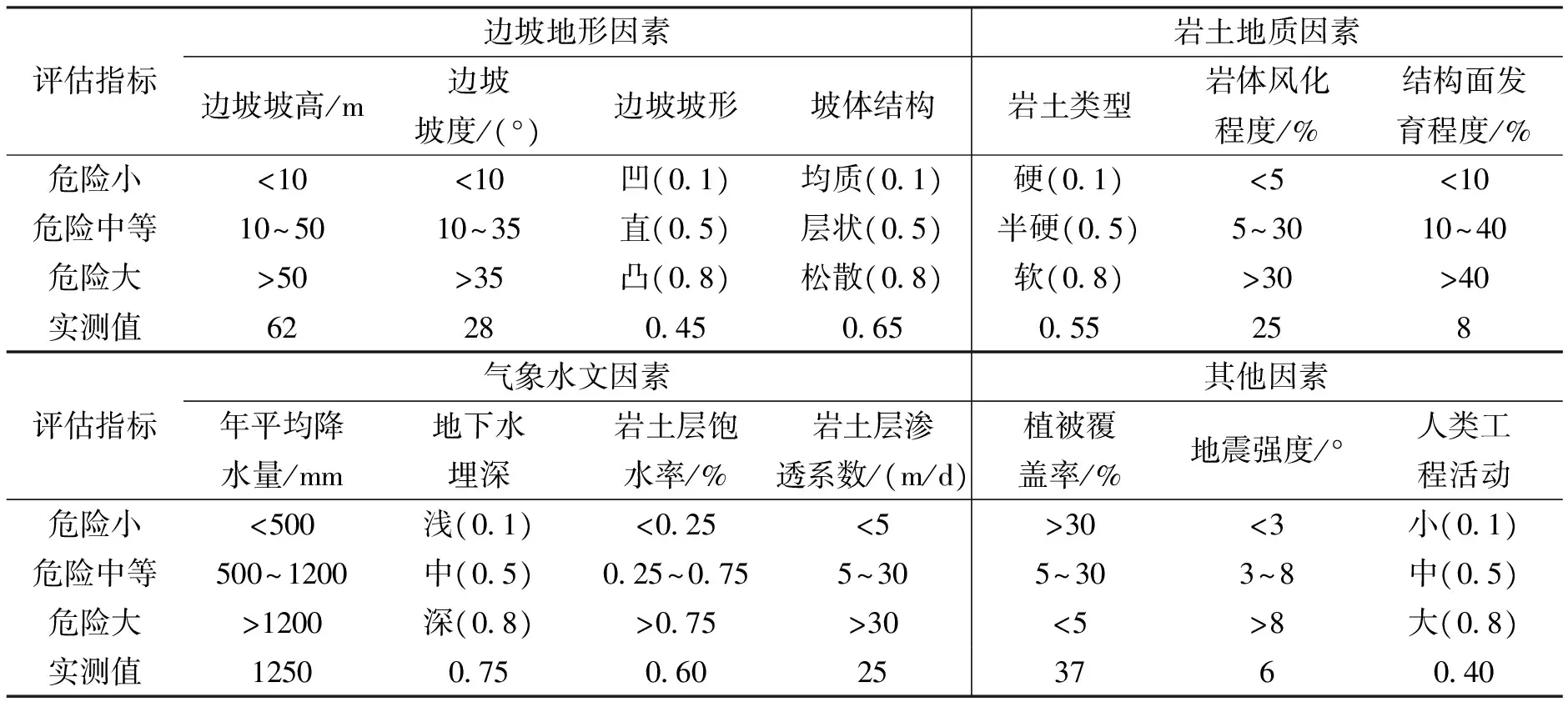
评估指标边坡地形因素岩土地质因素边坡坡高/m边坡坡度/(°)边坡坡形坡体结构岩土类型岩体风化程度/%结构面发育程度/%危险小<10<10凹(01)均质(01)硬(01)<5<10危险中等10~5010~35直(05)层状(05)半硬(05)5~3010~40危险大>50>35凸(08)松散(08)软(08)>30>40实测值6228045065055258评估指标气象水文因素其他因素年平均降水量/mm地下水埋深岩土层饱水率/%岩土层渗透系数/(m/d)植被覆盖率/%地震强度/°人类工程活动危险小<500浅(01)<025<5>30<3小(01)危险中等500~1200中(05)025~0755~305~303~8中(05)危险大>1200深(08)>075>30<5>8大(08)实测值125007506025376040
2.2 公路边坡分段
目前,对于公路边坡分段的标准,还没有统一规定的适用准则,大多都是结合研究区实际情况,经专家组判断分析来进行划分。结合专家意见、前人研究成果及实地考察情况,该文按照地质条件来对研究区边坡进行划分,地质条件主要有岩性、地层、坡高、坡度等,将以上四个条件相似的边坡地形分为一段,共分10段,每段距离不等,分别标记为1~10号。
2.3 整体评估
2.3.1 构建层次结构模型
在进行整体评估前,需先确定公路边坡灾害影响因子并构建相应的层次结构模型,结合前人研究成果、专家判断及研究区地质环境情况,本文从边坡地形、岩土地质、气象水文、其他因素等四个角度进行考量考察,总结了4类14项公路边坡灾害的主要影响因子,并将其作为进行危险性评估的参评因子,分别如下所示:边坡地形因素(边坡高度、边坡坡度、边坡坡形);岩土地质因素(坡体结构、岩土类型、岩土风化程度、结构面发育程度);水文气象因素(年平均降水量、地下水埋深、岩土层饱水率、岩土层渗透系数);其他因素(植被覆盖率、地震强度、人类工程活动)。最后,以公路边坡危险性评估为总目标,以边坡地形因素、岩土地质因素、气象水文因素、其他因素为准则层,以二级参评因子为方案层,建立公路边坡危险性评估层次结构模型,并定义危险性中等及中等以上的边坡为危险路段。层次结构模型如图2所示。
2.3.2 参评因子指标量化
层次结构模型构建完成后,采用AHP-模糊综合评估法分别对1~10号路段进行整体评估。结合专家意见,为便于评估,各路段参评因子指标量化值都取平均值,对于坡度、坡高等定量因子,采用实测数值进行描述;对于坡形、坡体结构等用文字描述的定性因子,采用专家定性分析法确定其量化值。以4号路段为例,该路段全长约4 km,平均坡度约28°,平均坡高约62 m,坡形多为直坡,植被平均覆盖率约37%,地震烈度为Ⅵ度,地质灾害以滑坡为主,坡体结构以巨厚层状为主,岩土类型多为中等半硬-强风化板岩,灰褐色,岩体较破碎,部分岩体呈现较严重泥化现象,该区域地下水容量丰富,年平均降水量约1 250 mm左右。4号路段各项参评因子指标量化值如表1所示。
2.3.3 构造判断矩阵
根据4号路段边坡实际情况,结合专家意见,选用1~9标度法对公路边坡危险性评估的各项参评因子相对重要性进行两两比较,赋予A~U、C1~C14相应的权重值,并在此基础上,构造5个判断矩阵,依次为:A~U、U1~C、U2~C、U3~C、U4~C。以U4~C为例,其判断矩阵如表2所示。
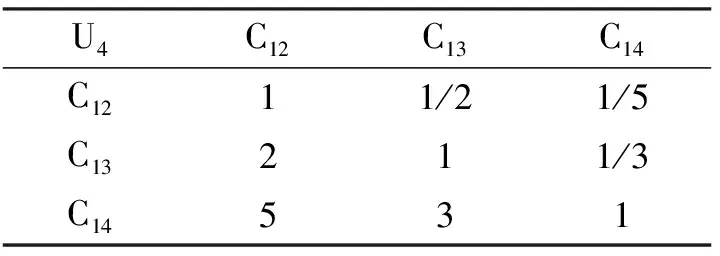
表2 U4~C判断矩阵
2.3.4 层次单排序
层次单排序是指针对上层次中的某个元素,确定本层次与之有联系的各个元素相对重要性排序的权重值,目的是解决判断矩阵的特征根和特征向量的计算问题,如针对判断矩阵B,计算满足式(1)的特征根和特征向量。
BW=λmaxWi。
(1)
式中:λmax为B的最大特征根,W为对应于λmax的特征向量;Wi为对应于W的分量,即参评因子层次单排序的权重值。目前,计算判断矩阵的最大特征根及特征向量的主要方法为和积法或方根法。以U4~C判断矩阵中C12因子(植被覆盖率)为例,本文采用方根法求解其最大特征根及特征向量,具体计算步骤如下所示:
(1)首先求解判断矩阵中C12行列(第一行)指标乘积M1,可得:
(2)
(2)其次计算M1的三次方根W1,可得:
(3)
(3)最后进行归一化处理,计算权重W1,可得:

(4)
同理,根据上述步骤,可依次求出其他参评因子的层次单排序权重值。参评因子权重计算完成后,还需对结果进行一致性检验,以验证矩阵是否满足一致性。以U4~C判断矩阵为例,一致性检验步骤如下所示:
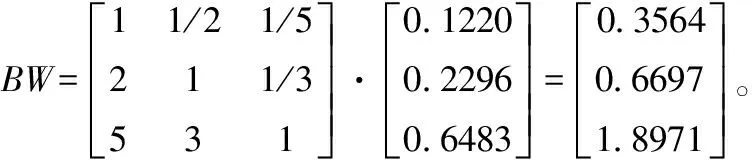
(1)首先计算U4~C矩阵三个因子权重(W1,W2,W3)的特征向量W,可得:
W=(W1W2W3)T。
(5)
(2)其次计算判断矩阵的最大特征根λmax,可得:
(6)
式中:
(7)
(3)最后计算判断矩阵的一致性指标CI和随机一致性比例CR,可得:

(8)
(9)
通过计算结果可知,该矩阵CR值小于0.1,证明其满足一致性检验。同理,根据上述步骤,可依次求出其他4个判断矩阵的层次单排序权重值及一致性比例。经计算,A~U等5个矩阵的一致性比例值CR均小于0.1,说明文中构造的判断矩阵是合理的、满足标准的。
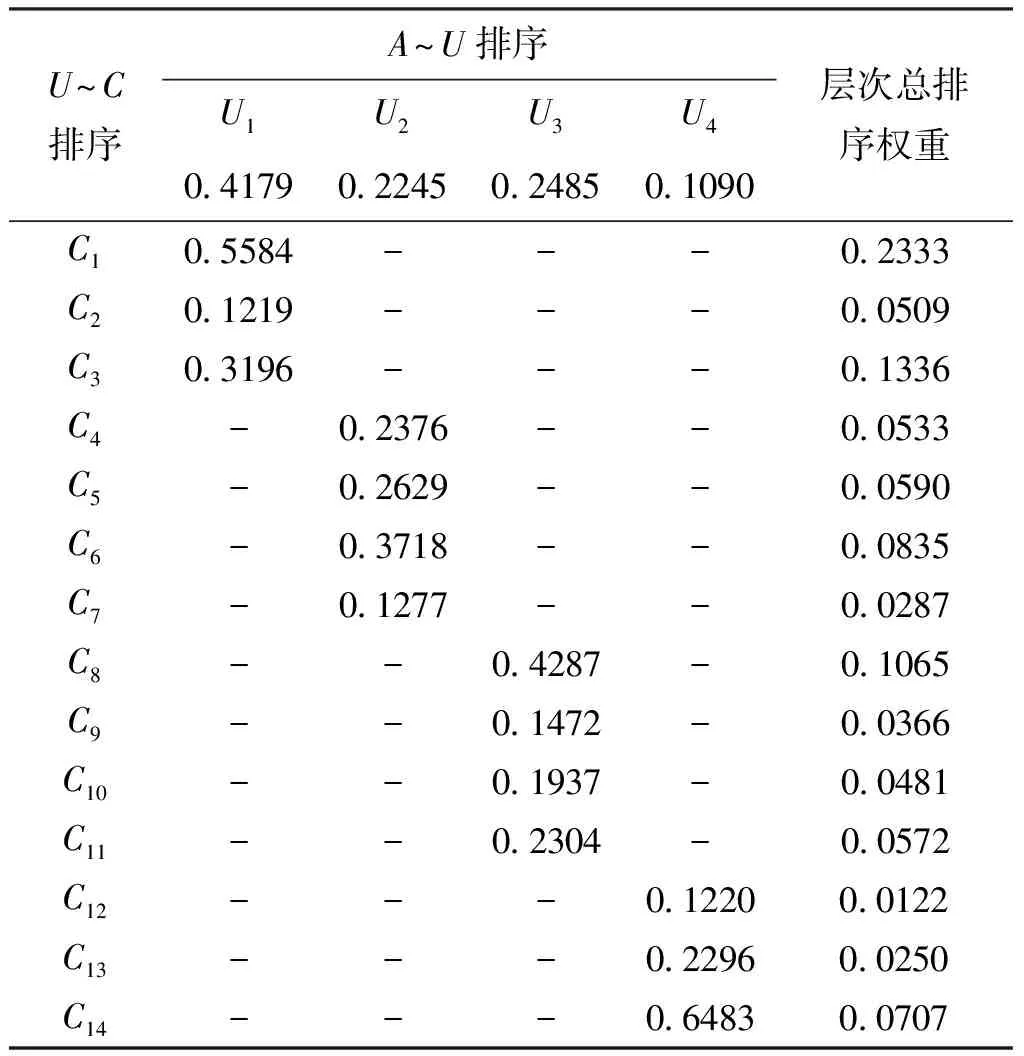
表3 参评因子层次总排序权重
2.3.5 层次总排序
计算出U1~C等5个判断矩阵的层次单排序权重值后,根据从上到下的顺序,依次求出公路边坡危险性评估14个参评因子的层次总排序权重值,可得权重总矩阵:A=[0.2333, 0.0509, 0.1336, 0.0533, 0.0590, 0.0835, 0.0287, 0.1065, 0.0366, 0.0481, 0.0572 , 0.0122, 0.0250, 0.0707]。参评因子总排序权重值如表3所示。同理,确定各因子层次总排序权重后,仍需对其进行一致性检验,经计算,可得:
(10)
式中:a1,a2,a3…a14分别为各参评因子的总排序权重值。通过式(10)可知,层次总排序一致性比例值CR<0.1,说明其满足一致性标准。
2.3.6 构造隶属函数
通常情况下,公路边坡危险性评估根据参评因子所对应的不同危险等级来设立隶属函数,隶属函数一般包括梯形分布、半梯形分布、矩形分布、抛物线分布等,每种分布又分为偏小型、中间型及偏大型。结合研究区实际情况及专家意见,选择降半梯分布函数作为文中各参评因子隶属函数,具体内容如下所示。
(11)
(12)
(13)
式中:xm表示第m个边坡危险性评估参评因子;bn(xm)表示第m个因子对第n级边坡危险性评估级别的隶属度;jm,km,lm分别表示第m个因子(指标越小越安全)对应B1到B3三级边坡危险性评估等级的分界值。反之,植被覆盖率等指标越大越安全的因子隶属函数则与上式相反。
2.3.7 构造模糊矩阵
将表2中指标越小越安全的参评因子代入式(11)~式(13),指标越大越安全的因子代入相反的隶属函数,最后每个因子可得到3个隶属函数方程,14个因子共42个矩阵。经计算,可得公路边坡危险性评估的模糊关系总矩阵R为:
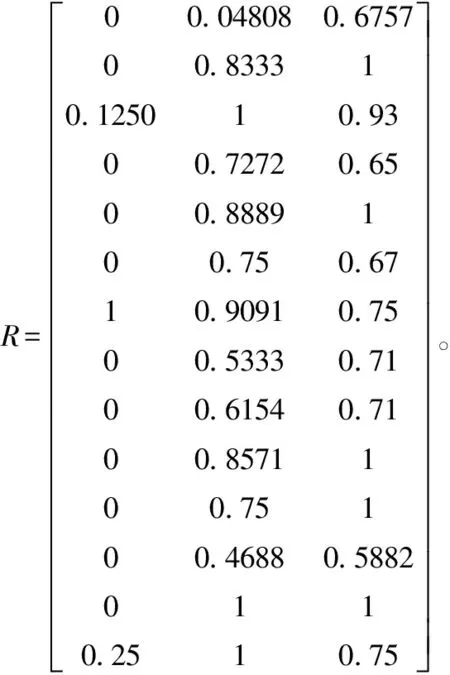
(14)
2.3.8 综合评估结果
基于上述步骤求出的结果,将参评因子权向量A和其模糊关系总矩阵R进行有机结合,可得4号路段边坡最终的危险性评估结果B:
B=A·R=[0.063075 0.7329726 0.837273]。
(15)
根据最大隶属度原则,最大隶属度B所对应的位置即为评判目标的最终危险级别,鉴于评判集B=[B1,B2,B3]=[Ⅰ,Ⅱ,Ⅲ],因此由式(15)可知,4号路段边坡危险性级别的最大隶属度B=0.837237=Ⅲ,即该边坡危险性大。经实地考察和专家分析可知,4号路段边坡曾发生多起滑坡、崩塌灾害,边坡整体稳定性较差,危岩体较多,建议公路部门对该区域进行重点防范,并进行相应的排险处理。通过对比可知,文中AHP-模糊综合评估结果与实地考察和专家分析结果大体吻合,说明该方法对公路边坡进行危险性整体评估是可行的。同理,采用该方法可依次求出其他路段边坡的危险性整体评估结果,具体如表4所示。

表4 各边坡危险性整体评估结果
2.4 局部评估
2.4.1 数据获取及处理
整体评估完成后,利用车载LiDAR系统采集各路段边坡两期点云数据,采集时间分别为2016年4月和2017年4月,时间间隔为1年。由于车载LiDAR系统采集数据时具有一定的盲目性,因此其采集的边坡点云数据中涵盖了一定的植被信息,而这些植被信息在边坡建模时会产生较大的影响。针对此点,为了提高边坡模型质量,在DEM建模前需先滤除掉边坡表面的植被信息,在具体应用中,本文采用车载LiDAR系统配套的RiscanPro软件来实现植被信息的滤除。以4号边坡第一期数据为例,滤除植被后的边坡点云效果如图3所示,图3中点云的空洞部分,即为被滤除掉的植被信息。
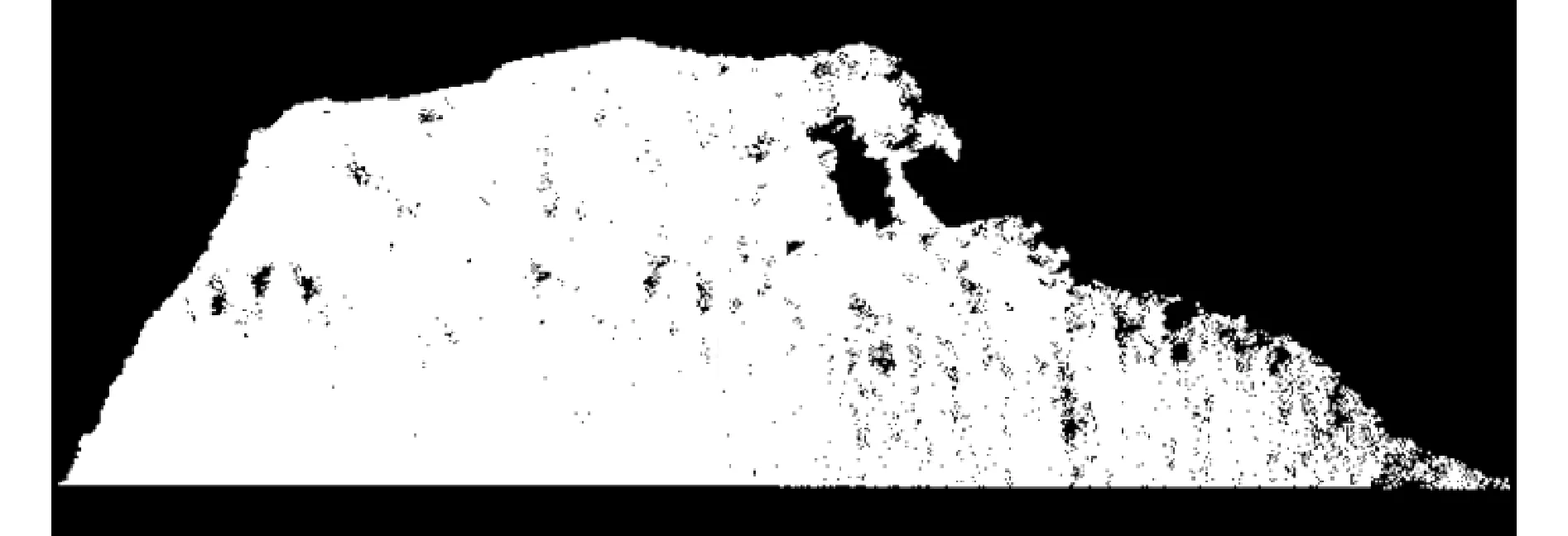
图3 植被滤除后点云效果图
2.4.2 边坡模型对比
数据处理完成后,利用CloudCompare软件构建边坡两期DEM模型,并使用色谱分析法对两期模型进行叠加对比,给出两期模型色谱对比图,通过观察图中边坡位移情况,找出具体的危险点。以4号边坡为例,采用色谱分析法对其两期模型进行对比,如图4所示,其中冷色调(如蓝青色)表示负向位移变化,暖色调(如红橙色)表示正向位移变化,边坡最大位移形变量设置为0.5m,从图4中可以清晰看出:①4号边坡整体处于不稳定状态,位移情况较多,尤其是边坡下半部分,位移形变较为严重;②椭圆标定的边坡右下角区域为位移距离较大的地点,即可能发生边坡灾害的危险点,公路管理部门可对该区域进行重点防范并做出相应的排险处理。
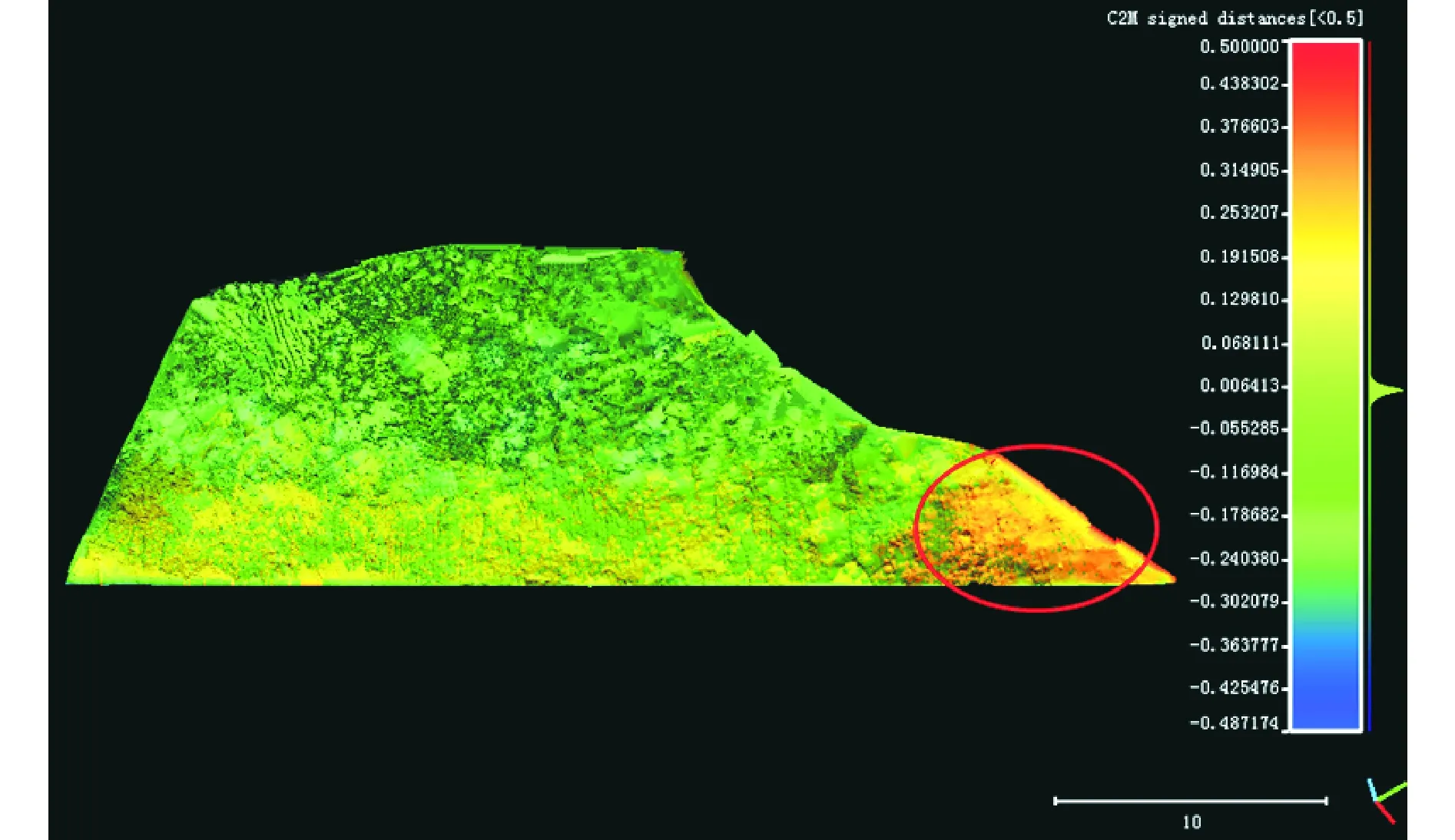
图4 两期边坡点云模型色谱对比图
2.5 评估总结
由整体评估结果可知:研究区公路边坡整体处于不稳定状态,危险路段较多。其中危险性小的路段为:1、3、6、7、9;危险中等的路段为:2、5;危险性大的路段为:4、8、10。结合局部评估结果和实地考察情况,经专家组研讨分析,对各危险路段可能发生的灾害类型进行定性判断,结果如下所示:
(1)2、4、8号路段边坡易发生滑坡、塌方灾害,需对边坡防护堤进行加固加高处理;另外,根据现场考察情况可知,2号边坡附近人类工程活动较多,建议这些工程活动先暂时停止,待对边坡进行加固处理后,再继续展开,以防引起滑坡灾害。
(2)5号路段边坡易发生落石、崩塌灾害,公路部门可根据局部评估确定的危险点,对边坡危岩体进行排查,消除落石隐患;另外还可在该边坡附近设置“注意落石”等安全警示标志,提醒游客车辆路过此处时小心通行。
(3)10号路段发生泥石流、崩塌灾害的可能性较大,尤其是在强降雨及暴雨天气下,公路部门应对该区域进行重点监管,并通过交通广播发布安全通告,提醒路人车辆经过此处时注意安全,谨慎通行。
3 结论
(1)本文基于AHP-模糊综合评价法、车载LiDAR系统、DEM建模技术及色谱分析法等,提出一种新的公路边坡危险性综合评估方法,并以重庆市某公路为例进行应用分析。结果表明,该方法不仅能确定边坡危险等级,还能找出其中的具体危险点,为公路边坡危险性评估研究提供了一种新思路。
(2)相比传统公路边坡测量方法,本文采用先进的车载LiDAR系统采集公路边坡数据。该系统具有速度快、精度高、无接触、自动化、全天候、机动性强等优点,不仅能降低测量成本,提高测量效率,还能获取到更加完整准确的边坡数据。
(3)本文将测绘学科的先进技术理念与其他交叉学科进行了有机结合,初步尝试了由面到点、由整体到局部、由宏观到微观的公路边坡危险性综合评估,虽然取得了一定成效,但仍有很多问题需要研究。如公路分段的依据略显模糊,不够严谨;危险性评估的参评因子不够全面、危险等级略少、量化依据不够客观等;后续会针对以上各种问题,继续深入研究。
[1] 张从明.公路边坡治理措施及安全评价方法[M].北京:人民交通出版社, 2009.
[2] 赵华.高速公路沿线黄土滑坡群(带)的利导与整治[J].灾害学, 2016, 31(3):60-65.
[3] Teoman M B, Topal T, IIk N S.Assessment of slope stability in Ankara clay: a case study along E90 highway[J].Environmental Geology, 2004, 45(7):963-977.
[4] Gortmaker S L, Must A, Sobol A M, et al.Assessment of Rockfall Hazard along the Road Cut Slopes of State Highway-72, Maharashtra, India[J].Geomaterials, 2013, 3(1):15-23.
[5] 何锋, 吴树仁, 张怡权,等.圆弧形公路边坡稳定性分析的神经网络法[J].地球学报, 2004, 25(1):95-98.
[6] 张菊连, 沈明荣.高速公路边坡稳定性评价新方法[J].岩土力学, 2011, 32(12):3623-3629.
[7] 柳厚祥,胡勇军,曹志伟,等.基于模糊聚类理论的公路边坡稳定性分区研究[J].公路交通科技, 2015, 32(5):49-55.
[8] 王卫东, 刘超, 李大辉,等.基于GIS的公路边坡危险性分析与预警系统研究[J].华中师范大学学报(自然科学版), 2015, 49(3):452-459.
[9] 赵欢, 田伟平, 齐洪亮,等.陕西公路边坡灾害危险性分区研究[J].灾害学, 2016, 31(4):75-81.
[10] 刘洋洋, 李永强, 李有鹏,等.基于AHP-模糊综合评价法的山区丘陵公路灾害易损性研究——以河南省修武县为例[J].灾害学, 2017,32(2):32-38.
[11] 秦胜伍, 曹荣国, 李广杰,等.基于FAHP的功效系数法的岩质边坡稳定性分级[J].灾害学, 2016, 31(4):27-32.
[12] 杨纶标, 高英仪.模糊数学原理及应用[M].广州:华南理工大学出版社, 2004.
[13] 张春宇,高燕希,蒋明锋,等.二级模糊综合评判在公路边坡稳定性分析中的应用[J].公路工程, 2008, 33(5):109-113.
[14] 阮航,张勇慧,朱泽奇,等.一种改进的公路边坡稳定性模糊评价方法研究[J].岩土力学,2015, 36(11):3337-3344.
[15] 李永强, 盛业华, 刘会云,等.基于车载激光扫描的公路三维信息提取[J].测绘科学, 2008, 33(4):23-25.
[16] 任沂斌, 陈振杰, 程亮,等.采用动态负载均衡的LiDAR数据生成DEM并行算法[J].地球信息科学学报, 2015, 17(5):531-537.
[17] 方莉娜, 杨必胜.车载激光扫描数据的结构化道路自动提取方法[J].测绘学报, 2013, 42(2):260-267.
[18] 陈驰, 王珂, 徐文学,等.海量车载激光扫描点云数据的快速可视化方法[J].武汉大学学报(信息科学版), 2015, 40(9):1163-1168.
[19] 刘昌军, 张顺福, 丁留谦,等.基于激光扫描的高边坡危岩体识别及锚固方法研究[J].岩石力学与工程学报, 2012, 31(10):2139-2146.
[20] 翟旭.利用三维激光扫描技术的边坡形变监测方法研究[D].北京:中国地质大学, 2015.
Research on Risk Evaluation of Highway Slope Based on AHP-Fuzzy and Laser Point Cloud Data
LIU Yangyang, LI Yongqiang, GUO Zengzhang and LI Youpeng
(CollegeofSurveyingandMapping,HenanPolytechnicUniversity,Jiaozuo454003,China)
In view of the current highway slope risk assessment mostly to judge the risk level, rarely go deep into the specific point of the problem; put forward a method for evaluating risk of highway slope based on AHP-Fuzzy and laser point cloud data. In this method, first of all, the highway is divided into several sections according to the geological condition, secondly, the AHP-fuzzy comprehensive evaluation method is used to carry out a overall assessment and determine the dangerous slope, thirdly, using vehicle LiDAR system to obtain two period laser point cloud data of each dangerous slope, and building two-period DEM model for the dangerous slope. meanwhile, the two-period model were analyzed and compared by the method of chromatography analysis for local evaluation and find out the specific risk, finally, according to expert opinion to determine the risk of the type of disaster, and put forward the corresponding prevention and control recommendations. Taking a highway in Chongqing city as an example, a new method is used to evaluate it, results show that, the study area 4, 8, 10 sections of a large risk, prone to landslides and the proposed timely prevention and control measures. Compared with the traditional method, this method can not only determine the dangerous slope, but also find out the concrete danger point, which opens up a new way for the research of the highway slope disaster prevention and reduction.
highway slope; risk assessment; AHP-Fuzzy evaluation method; vehicle LiDAR system; laser point cloud data; disaster prevention and mitigation
刘洋洋,李永强,郭增长,等.基于AHP-Fuzzy和激光点云数据的公路边坡危险性评估研究[J].灾害学,2018,33(1):206-212.[LIU Yangyang, LI Yongqiang, GUO Zengzhang,et al.Research on Risk Evaluation of Highway Slope Based on AHP-Fuzzy and Laser Point Cloud Data[J].Journal of Catastrophology,2018,33(1):206-212.
10.3969/j.issn.1000-811X.2018.01.036.]
2017-05-28
2017-08-04
国家自然科学基金项目 (41501491);国家测绘局测绘地理信息公益性行业科研专项项目 (201412020);河南省重点科技攻关项目(112102210193)。
刘洋洋(1991-),男,河南许昌人,博士研究生,主要从事地理空间信息应用及灾害风险评估研究.
E-mail:975492655@qq.com
李永强(1976-),男,河南许昌人,博士,副教授,主要从事三维激光扫描及移动激光测量方面研究.
E-mail:liyongqiang@hpu.edu.cn
X43;P64;U416
A
1000-811X(2018)01-0206-07
10.3969/j.issn.1000-811X.2018.01.036
