双Buck逆变器的迭代学习控制方法
2018-01-03林建业蔡逢煌杜伟煌
林建业 蔡逢煌 杜伟煌
(福州大学,福州 350116)
双Buck逆变器的迭代学习控制方法
林建业 蔡逢煌 杜伟煌
(福州大学,福州 350116)
双Buck全桥逆变器由于无桥臂直通、直流电压利用率高、效率高等优点而被广泛应用。本文基于双Buck全桥逆变器针对直流电源波动、死区效应、稳态时线性和非线性负载电流扰动引起周期性扰动问题,提出一种电压外环迭代学习控制、电流内环无差拍控制的双环控制策略。仿真结果表明,采用该控制策略可使双Buck全桥逆变器具有较好的带载能力及精确的跟踪性能。
双Buck全桥逆变器;迭代学习控制;带载能力;跟踪性能
随着可再生能源的发展,逆变器作为新能源电能变换越来越受重视。传统桥式逆变器存在着桥臂直通、二极管反向恢复时间较长、损耗较大的问题,基于 Buck拓扑的双降压逆变器输入直流电利用率高、效率高、无桥臂功率管直通、续流二极管可优选[1]。基于电流滞环控制的电压外环电流内环双闭环控制方式简单易于实现、可靠性高、稳定性好等优点,而成为一种最为广泛应用的变换器控制方式[2-4],且双环控制方法,电压外环可稳定输出电压、减少波形畸变,电流内环可增强系统稳定性和动态性。
然而,在双Buck逆变器中,采用电流滞环型双环控制方式跟踪性能较弱、带载能力较差、稳态精度不高[5-8]。文献[6]得出负载增大,系统的电压调整率也将增大,在功率较大时,空载到满载过程中逆变器输出电压变化量大,稳压精度差,即外特性较软。文献[7]提出基于自适应滞环电流控制的复合控制策略:内环自适应滞环电流控制减少了损耗,外环数字PID和重复的复合控制改善了动态特性。文献[9-10]应用复合重复控制,动静态特性较好,然而还必须加入滤波器与补偿器以保证逆变器的稳定性和鲁棒性,设计较为复杂。而迭代学习控制不依赖于系统精确模型,利用前一次或前几次的误差和控制信息修改当前次的控制输入,即可逐渐逼近最优的控制量,且理论上能达到无静态误差跟踪,系统输出可以完全跟上期望的轨迹,负载适应能力强[11-16]。因此,为了提高双Buck全桥逆变器的带载能力和跟踪性能,本文提出一种迭代学习控制策略,对比分析传统的双环控制和迭代学习控制,仿真结果表明了该策略的可行性。
1 双Buck逆变器建模与传统双环控制策略
双Buck逆变器由2个Buck电路组成,如图1所示。开关管 S1、S4,二极管 D1、D4,滤波电容Cf和滤波电感 L1构成的 Buck电路 1;开关管 S2、S3,二极管 D2、D3,滤波电容 Cf和滤波电感 L2构成的Buck电路2。拓扑为电流半周期工作模式:电感 L1和 L2分别在输出电压正、负半周工作,且L1=L2=L。其中Ud为输入电源,u0为输出电压。当u0>0时,S2、S3关断,S1、S4调制工作;当 u0<0时,S1、S4关断,S2、S3调制工作。

图1 双Buck逆变器主电路图
双 Buck逆变器传统双环控制如图 2所示[17],滞环电流控制环可用一比例环节等效,用电感电流采样系数倒数表示闭环传递函数增益。得到环宽恒定的变频滞环电流控制系统等效模型如图2(b)所示。
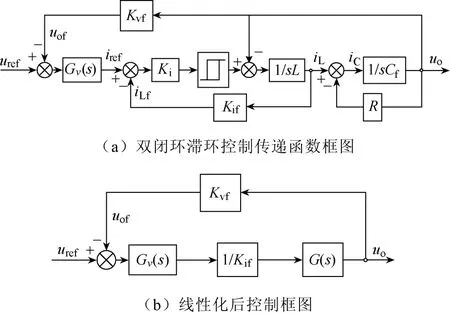
图2 双Buck全桥逆变器的双环控制
根据图2(b)可以得到系统闭环的传递函数如下:

当输入量 uref( t)= Urefsin(ω t)时,系统输出 u0(t)=Uref|T ( jω)|sin(ω t +θ),可得阻性负载系统从空载加至满载的电压调整率[6](即负载变化时输出电压的相对变化量 Δ U = ( U1- U2) /U1× 1 00%):

2 迭代学习控制策略
2.1 算法原理性分析
迭代学习控制策略简单,不需要精确、具体的逆变器建模,能够很好地抑制周期性或者重复性的扰动,具有较强的学习能力。通过上文分析,本文提出一种电压外环迭代学习控制、电流内环无差拍控制的双环控制策略,如图3所示,电压迭代学习控制用来消除直流电源波动、死区、非线性负载等带来的周期性干扰,提高输出波形的稳态精度;电流无差拍控制主要用来提高系统的动态响应速度。

图3 双Buck逆变器的迭代学习控制
对于双 Buck全桥逆变器而言,可令 iL1(t)=iL2( t) = iL(t),L1= L2= L由于逆变器正负半周对称,因此这里只分析正半周情况,可令 UA(t) = U ( t),得逆变器系统模型如下:

选择电容电压 uc和电感电流 iL为状态变量,逆变器交流输出电压 U ( t)和负载电流 iR(t)为输入,电容电压为系统输出。 x ( t) = [uc( t), iL(t )], u ( t)=[U( t), iR(t) ] , y ( t) = uc( t)。逆变器的系统状态方程为

由于直流电源波动、死区、非线性负载电流扰动等引起的周期性干扰,对应状态方程可写为

式中, w ( t)、 v( t)为周期性扰动。为解决该问题,本文提出电压外环迭代学习控制、电流内环无差拍控制,具体策略如下。
负载参考电压 yd(t),负载采样电压 yk(t),可得输出误差为: ek( t) = yd(t) - yk(t ),本文采用开闭环P型迭代学习控制学习律,公式如下:

式中,k为迭代的次数; φ1、 φ2为学习率,利用周期性信号特征,对应离散时间的周期可为

式中,u( t - N )为 u ( t)对应的上一周期采样值,z-N为周期延迟环节, z-N的最大模值为1,相位延迟了一周,u( t - N ) = u ( t) ⋅ z-N,代入(7)可得传递函数为

控制器结构如图4所示。
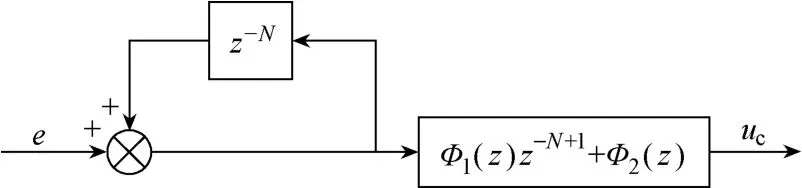
图4 迭代学习控制器的结构图
2.2 稳定性分析
对式(6)进行z变换可得

误差 Ek= Yd( z) - Yk( z) 、 Ek+1= Yd( z) - Yk+1(z ),将(9)代入 Y ( z) = P( z) U( z ),得

整理得


则可确保随着迭代次数的增加,误差信号趋于零[19]。由此可算出 φ1、 φ2的值。
3 仿真分析
为了验证上述所提迭代学习控制策略的正确性和可行性,在 PSIM中建立了仿真模型。具体参数设计如下:电感L1=L2=660μH,电容Cf=1μH,负载电阻R=48.4Ω,直流输入电压Ud=360V,输出电压参考值Uref=220V,输出频率f0=50Hz,额定功率P0=1000W,额定电流I0=4.545A,开关频率fs=100kHz。
图5为传统双环PID控制实际输出电压仿真波形,由图可以看出系统能很好跟踪参考波形。

图5 传统双环PID控制实际输出电压仿真波形图
图6 为迭代学习控制策略下系统稳态时的实际输出电压和参考电压仿真波形图。由图可以看出,在 0.17s处系统完全跟踪。图 7为迭代学习控制下实际输出电压波形图,可以发现输出电压谐波得到很好抑制,THD值只有2.03%。

图6 迭代学习控制下实际与参考输出电压仿真波形图
图8 和图9是加周期扰动后2种控制策略输出电压波形,可以看出:当加入扰动时,传统双环控制策略下的输出波形发生波动,THD达6.03%;而迭代学习控制策略下输出电压波形能迅速消除扰动影响且短时间内达到完全跟踪,THD为1.32%。由此表明,采用迭代学习控制策略能使系统具有较好的带载能力和优越的跟踪性能。

图7 迭代学习控制下实际输出电压波形图

图8 加周期扰动后传统双环控制下输出电压波形
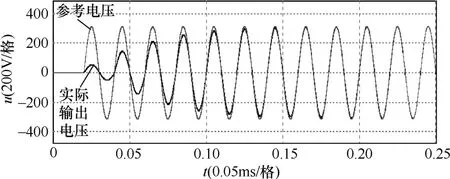
图9 加周期扰动后迭代学习控制下输出电压波形图
4 结论
本文基于双 Buck全桥逆变器针对周期性扰动问题,分析了双Buck全桥逆变器双环控制下输出电压调整率的影响因素,提出了一种电压外环迭代学习控制、电流内环无差拍控制的控制策略。开闭环P型迭代学习控制能很好消除周期扰动,电流无差拍控制能有效提高动态性能。最后进行了仿真分析,结果表明,采用该控制策略的双Buck全桥逆变器带载能力强,波形跟踪性能好,稳态精度高且过零畸变小,具有很好的动态和静态性能。
[1] 尹培培, 洪峰, 王成华, 等. 无源无损软开关双降压式全桥逆变器[J]. 电工技术学报, 2014, 29(6): 40-48.
[2] Liu Jun, Yan Yangguang. A novel hysteresis current controlled dual buck half bridge inverter 2003.
[3] 王建华, 张方华, 龚春英, 等. 滞环电流控制逆变器建模及分析[J]. 电工技术学报, 2010, 25(6): 63-69.
[4] 赵晋斌, 戴剑丰, 屈克庆. 基于电容电荷平衡的滞环控制策略[J]. 电工技术学报, 2015, 30(16): 63-69.
[5] 孟准, 王议锋, 杨良. 一种适用于小功率可再生能源的单相高频双Buck全桥并网逆变器[J]. 电工技术学报, 2017, 32(8): 220-228.
[6] 马海啸, 陈凯, 龚春英. 双 Buck逆变器的建模与优化设计[J]. 电工技术学报, 2012(8): 35-41.
[7] 彭传彪, 王少坤, 王晓锋, 等. 自适应滞环电流控制逆变器复合控制策略[J]. 电力自动化设备, 2011,31(7): 42-47.
[8] Yao Z, Wang Z, Xiao L, et al. A novel control strategy for grid-interactive inverter in grid-connected and stand-alone modes[C]//IEEE Applied Power Electronics Conference and Exposition. IEEE, 2006: 5.
[9] 王越男, 徐鹏, 郭晋男, 等. 逆变电源系统复合控制方法研究[J]. 电气技术, 2016, 17(8): 33-37.
[10] 张震, 柴文野, 潘登, 等. 基于 PID 和重复控制的UPS逆变器的研究[J]. 电测与仪表, 2011, 48(5):89-92.
[11] 侯忠生, 许建新. 数据驱动控制理论及方法的回顾和展望[J]. 自动化学报, 2009, 35(6): 650-667.
[12] 孟琦, 侯忠生. 基于周期信号的迭代学习控制在逆变器中的应用[J]. 控制理论与应用, 2016, 33(3):289-294.
[13] 许慧敏. 非线性系统迭代学习控制算法研究[D]. 北京: 华北电力大学, 2016.
[14] 邹燃. 迭代学习控制算法研究及其在风电控制系统中的应用[D]. 成都: 电子科技大学, 2009.
[15] 郝晓弘, 周勃. 具有自适应学习的开环PD型迭代学习控制算法研究[J]. 电气工程学报, 2015, 10(10):15-20.
[16] 顾博川, 黄缙华, 刘菲. 分布式电源自律分散调度控制方法研究[J]. 电气技术, 2015, 16(2): 23-26.
[17] 朱琦, 王慧贞. 滞环电流控制双Buck逆变器建模及分析[J]. 电力电子技术, 2012, 46(2): 63-65.
[18] 侯世英, 邹学伟, 张立帅, 等. 双 Buck逆变器的双环滑模控制策略[J]. 电力自动化设备, 2014, 34(11):100-106.
[19] Deng Heng, Oruganti R, Srinivasan D. Analysis and design of iterative learning control strategies for UPS inverters[J]. IEEE Transactions on Industrial Electronics, 2007, 54(3): 1739-1751.
Iterative Learning Control Method for Dual Buck Inverter
Lin Jianye Cai Fenghuang Du Weihuang
(Fuzhou University, Fuzhou 350116)
The dual Buck full-bridge inverter is widely used because the advantages of that it is no bridge through, the DC voltage utilization is high, high efficiency and so on.This paper, which is based on the dual Buck full-bridge inverter for periodic perturbation problemscause by DC power fluctuations,dead-time effect, steady-state linear and nonlinear load current disturbance, a double loop control strategy of voltage outer loop iterative learning control and current inner loop Dead-Beat control is proposed. The simulation results show that the control strategy can make the dual Buck fullbridgeinverter have better load capacity and accurate tracking performance.
dual Buck full-bridge inverter; iterative learning control; load capacity;tracking performance
林建业(1992-),男,福建泉州人,硕士研究生,主要研究方向为电力电子系统分析与控制。
