基于图像识别的太阳能电池片缺陷检测
2018-01-03秦文丽
秦文丽
(北京信息科技大学机电工程学院,北京 100192)
基于图像识别的太阳能电池片缺陷检测
秦文丽
(北京信息科技大学机电工程学院,北京 100192)
一种应用于工厂流水线快速分选检测的方法,即基于图像识别的太阳能电池片检测方法。通过显著图模型对生产线上的电池片进行图像采集,通过基于OpenCV的程序对图像进行处理,得出电池片对应的显著图并判断是否有色斑等缺陷。实验表明,该方法为快速且较准确地进行分选检测提供了一种新的手段,较传统的人工检测或通电检测方式有更好的实际应用意义。
图像识别;Itti模型;显著图;OpenCV
10.16621/j.cnki.issn1001-0599.2017.12.12
0 引言
能源短缺和环境污染是当今世界关注的重要问题,由此提出的基于新能源的各类利用方式成为发展和解决问题的主要支撑点。为了更好的利用太阳能这种具有诸多优点的一次能源,太阳能电池片已经广泛的出现在大众生活中。一些研究机构在提高太阳能使用率方面也加大了研究力度。从1999年至2009年,全球太阳能电池产量平均年增长率达到48.5%,而最近 5 a,这个数据更是高达 55.2%[1]。
虽然太阳能电池具有成本低、电池使用寿命长、无公害等优点,但生产太阳能电池片的过程中,由于材料和制作工艺等因素,生产的产品中可能有断角、缺栅、色斑或颜色不均等缺陷。色差类缺陷影响电池片的转换效率;缺陷类型为缺栅断线,则可能直接成为废品。当有色差的太阳能电池片与正常合格品放在一起使用时,将会影响整体的光电转换效率,所以在太阳能电池片生产后,还要按照同样的颜色标准进行检测。
为适合工厂生产自动化的检测方式,提出一种适用于流水线快速分选检测的方法,即基于图像识别的太阳能电池片检测方法。该方法主要通过显著图的方法,先对生产线上的电池片进行图像采集,再将采集到的图像传输到计算机,通过在Visual Studio程序对图像进行处理,得出它对应的显著图并判断是否有色斑等缺陷。
1 太阳能电池片缺陷检测
现代生产太阳能电池片的工艺,会出现不少带有缺陷的电池片,而这些缺陷不仅对电池片光电转换率造成影响,从而降低发电量以外,还对整个组件的表面美观造成一定影响。太阳能电池片的加工工艺流程如图1所示[2]。

图1 太阳能电池片加工工艺流程
太阳能电池片缺陷类型[3]:①边缘漏电——去背结不完全引起的漏电;②前电极烧结过度——电极金属过于深入发射极易造成漏电;③发射极破损、浆料污染、杂质污染、挂钩点——易漏电;④裂纹——可见和不易见的微小裂纹;⑤断栅——细栅局部不连续;⑥网带印;⑦背场缺陷——铝背场出现明显的异常区域;⑧电极接触不良;⑨无pn结;⑩黑芯片、位错簇、硅料边缘缺陷。
对不同缺陷的太阳能电池片的检测方法,根据是否需要通电,分为通电检测和非通电检测;根据主要检测的缺陷类型分为电致发光检测、光致发光检测和红外测量等方法[4]。E(I电致发光)适用于检测电池片电不均匀性缺陷,但是EI测试的劣势为不是总能确定某些缺陷的成因细节[5]。PL(光致发光)测量可用于整个太阳能电池制造过程的缺陷检测,且该测量有助于研究有材料缺陷或接触问题引起的太阳能电池功率损耗问题。IR(红外测量)适用于检测电池片的短路、分流、不活跃的电池部件或湿气等,但研究表明[5]并不是所有缺陷都会导致电池温度的升高,而且正常太阳能电池片在有较高的功率损耗时也会出现热区。故IR有时并不能正确识别缺陷。
2 显著图方法
典型图像识别系统的基本组成如图2所示,该系统一般分成2个阶段,训练阶段,训练集经过预处理、特征提取,然后利用提取到的特征学习分类器的参数,在学习的过程中,根据一些反馈信息重新调整预处理和特征提取的方式,直到学习出一个满意的模型为止[6]。

图2 典型图像识别系统的基本组成
显著图是在视觉环境中表明物体显著性的一种二维图像。当观察一张非纯色的图像时,人的视觉一般会在某些区域先进行观察,这些区域往往是一些相比与周围画面更突出的区域。将较周围环境突出的区域和观察者感兴趣的区域称为显著区域[7]。
Itti模型在显著图方法的发展和实现中具有重要意义。该显著图模型的具体实现方法如图3所示,基本过程如下[8]。首先将输入图像表示为9层的高斯金字塔,第0层是输入图像,第1~8层是5×5高斯滤波器对上一层图像进行线性滤波采样得到的,大小为上一层图像的1/2n。利用中心边缘算法计算每个特征,中心采用细致标度、边缘采用粗糙标度。将某一点作为中心,该点的像素相当于金字塔比例 C={2,3,4}而周围区域的比例为 s=c+d,d={3.4},所以每个特征就会产生6个特征图。研究中所选的特征为一般视觉特征,即亮度特征、颜色特征和方向特征。因三原色分别是红、绿、蓝,所以将颜色特征划分为红绿、黄蓝特征。亮度特征相对好提取。方向特征划分为4个:0°,45°,90°,135°。此时出现42个特征图。而迭代侧抑制方法使每张特征图中显著性竞争实例化。竞争实例化后,将每个特征类型的几个特征图融合成1个显著图。然后再将3个特征显著图融合成1个最终的地形显著图。这个显著图就是实现了刺激整合神经元的二维表。该过程中还有返回抑制机制,该机制的作用是先通过WTA网络扫描大多数的显著点或区域并找到注意力趋向的点或位置,找到后通过返回抑制机制瞬时抑制显著图中找到的该最显著点,使注意指针指向下一个最显著的点,然后相同的方法多次进行。
3 建立模型及具体实现
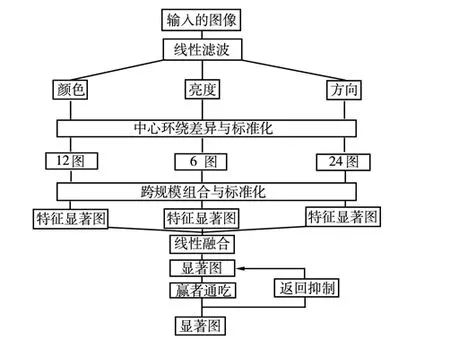
图3 遗传算法运算过程
基于Itti模型的基础提出一种针对检测太阳能电池片缺陷的模型。为了适合生产线检测的需要,借鉴传统的ITTI模型主体思路的基础上先加入摄像头采集图像过程,其次将整体过程划分为图像预处理部分、显著图计算部分和结果判定部分。通过OpenCV的C++程序编译,使计算机程序的快速处理满足工厂生产线流水线快速性、高效性、自动化的要求。
(1)图像预处理部分。由于图像在获取过程中,往往会受到外界因素的干扰,造成实际获取的图像信息有所干扰,且需要对整个模型系统进行一个初步的处理,所以需要采用预处理[9]。通过程序调用普通相机摄像头拍摄流水线上的太阳能电池片,每隔1000 ms进行一次图像采集,并将采集到的图像传送到计算机中,作为程序的输入,然后在程序中进行检查是否为空和载入内存操作。
该部分程序的功能是调取摄像头采集图像并返回数据。编程方法为先初始化一个capture指针,判断是否该指针中有数据,若有则通过OpenCV的cvCaptureFromCAM(0)从摄像头读入数据并放入capture中;若无则创建视频文件,然后判断该指针是否为空,若为空则退出程序;若不为空则将图像放入Ip1Image类型的以frame命名的内存空间下[10]。
(2)显著图计算部分。该模型的主体框架主要由5个模块组成。即当采集到流水线上太阳能电池片的图像并进行初步的预处理后,首先进行亮度特征模块处理,再进行颜色特征模块处理,方向特征模块处理;其次进入中心边缘模块处理,最后进行特征融合模块,最终生成显著图。
当有原始图像输入时,亮度特征通过I=(R+B+G)/3公式计算后得出提取后的亮度特征图。第二个模块程序的功能是对亮度特征图进行处理,提取出一张RG特征图和一张BY特征图。编程方法为首先输入之前处理过的亮度特征图,然后判断图上所有点的值是否小于最大值的0.1倍,若小于则结束该模块;若大于或等于则重新定义每一点的r,g,b值,且g值和b值算法相同。再通过公式(1)计算求出RG颜色特征图和BY颜色特征图。

方向特征模块的功能是依旧对每张亮度特征图提取4张方向特征图。编程方法为输入亮度特征图,然后通过filter2D滤波器就可以分别提取出4个不同方向的特征图。由于信号或图像的能量平常集中在幅度谱的低中频段,所以要对图像进行滤波,抑制较高频段的噪声对该频段有用信息的影响。
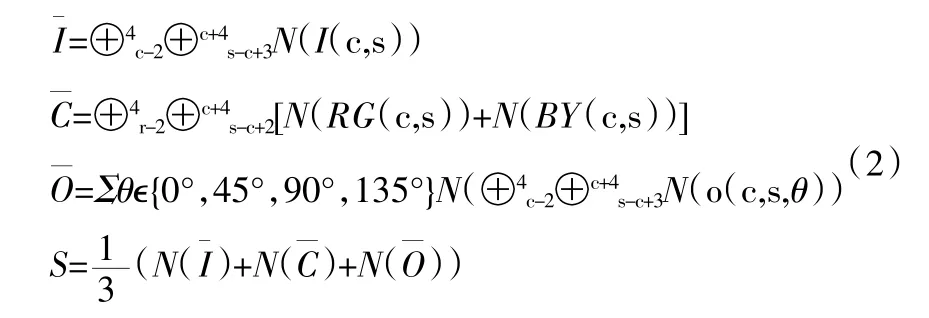
中心环绕模块即center-surround,该模块的功能为对上述模块结果特征图进行center-surround算法处理,最终得到6幅亮度特征图、12幅颜色特征图和24幅方向特征图。特征融合模块的功能是首先进行亮度、颜色、方向三大类的自身融合,得到3张特征图,再融合成最终的显著图。具体编程为将标准化后的特征图统一到σ=4的尺度上相加,用⊕表示,通过公式(2)进行计算提取。
(3)结果判定部分。对生成的显著图进行缺陷判断。若最终的显著图上除栅线位置白色区域面积是否大于栅线所占面积来实现。
当得出最终的显著图之后,若图上有显著区域,即图中有部分区域内的值大于某一限定值,则对该显著图中的显著区域进行面积计算。将所有显著区域面积减去栅线面积后判断是否大于0,若大于则为有缺陷的电池片。上述中的限定值选为0.8。
4 实验结果及分析
基于建立的模型及对应程序,进行生产流水线检测模拟。通过在电脑摄像头前投放不同太阳能电池片来模拟工厂采集图像过程;当程序处理出对应显著图并判断是否有缺陷后,一次实验结束,相同方法重复多次。
由图4可看出,该方法得出了原图像对应的显著图,而且在显著图上可清楚地观察到色斑的位置形状大小等。而正常的太阳能电池片对应的显著图中只有主栅位置较为显著,其他区域没有显著区域。实验中采集检测一张图像的时间为(3~5)s。由此实验可得出该显著图方法对于太阳能电池片缺陷的检测十分有效,能准确找出电池片上的缺陷位置并最终判断出该电池片是否为缺陷产品。由于检测过程的速度较为快速,适合工厂生产流水线的检测,满足了预期要求。
运用显著图方法进行图像检测的优点:①图像处理较为迅速。由于目前对视觉感受的要求逐渐提高,处理图像意味着处理大量的信息,对计算机也是复杂的过程;②显著图方法可找出图像中的显著区域。显著图在其他领域的应用效果显示结果都较为准确。将显著图法应用于电池片检测,实验表明该方法可行且取得了预期的效果。

图4 断角缺栅的图像对比
5 结束语
本文利用Itti提出的模型建立既考虑实际应用又保障识别效率、速度等方面的显著图模型。实验结果表明,采用图像识别的太阳能电池片缺陷检测,可以对电池片进行有效识别检测从而达到筛选的目的。图像识别技术尤其在目前具有更大的提升空间,因为深度学习与神经网络的发展,图像识别方法检测将会具有更广泛更优化的工厂应用。
[1]童钢.太阳能电池片分色及缺陷检测系统的研究[D].南京:江苏大学.2016.
[2]周达凯.基于VisionPro太阳能电池片外观检测系统设计[D].南京:南京理工大学.2016.
[3]王学盂,叶子锐,沈辉,梁璄强,尹浩平.晶体硅太阳能电池缺陷检测与分类评价体系[J].激光与光电子进展.2013(3):143-147.
[4]陈军.硅太阳能电池制备过程的全自动视觉检测设备关键技术研究[D].广州:华南理工大学.2011.
[5]Ebner.R,B.Kubicek,G.Ujvari.Non-destrutive techniques for quality control of PV modules:infrared thermography electro and photoluminescence imaging[J].Conference of the IEEE industrial Electronics Society.2012,Vol.20:8104-8109.
[6]李义.基于相关学习神经网络的图像识别方法研究[D].哈尔滨:哈尔滨工业大学.2015.
[7]娄树旗.基于视觉显著性的图像分割方法[D].北京:北京理工大学.2013.
[8]Itti.L,Koch.C.A saliency-based search mechanism for overt and covert shifts of visual attention[J].Vision Research.2000,Vol.40:1489-1506.
[9]韩修礼.面向移动设备的图像识别算法研究[D].北京:北京交通大学.2016.
[10]Bradski.G,于仕琪(译者).学习 OpenCV(中文版)[M].北京:清华大学出版社,2009.
TP317.4
B
〔编辑 李 波〕
