3种GPS+BDS组合PPP模型比较与分析
2018-01-02李博峰沈云中
臧 楠,李博峰,2,沈云中
1. 同济大学测绘与地理信息学院,上海 200092; 2. 大地测量与地球动力学国家重点实验室,湖北 武汉430077
3种GPS+BDS组合PPP模型比较与分析
臧 楠1,李博峰1,2,沈云中1
1. 同济大学测绘与地理信息学院,上海 200092; 2. 大地测量与地球动力学国家重点实验室,湖北 武汉430077
无电离层组合和非组合模型是GNSS精密单点定位(PPP)常用的两种函数模型。本文通过详细分析PPP的两种函数模型各类参数间的相关特性,建立了参数独立的函数模型。对非组合PPP模型的电离层参数引入虚拟观测方程进行约束,有效提高了PPP的收敛速度。最后,从定位精度和收敛时间两方面分析不同函数模型的GPS单系统和GPS+BDS组合PPP静态、模拟动态定位效果。结果表明:GPS单系统和GPS+BDS组合PPP定位精度相当,静态的无电离层组合与非组合PPP均可达到厘米至毫米级精度,动态PPP精度的平面优于3 cm,高程优于5 cm;无电离层组合PPP收敛时间优于非组合的PPP,电离层加权非组合PPP的收敛时间最短。动态定位中,电离层加权模型相比于无电离层组合模型,可减少约15%的收敛时间,相比于非组合模型,可减少约34%。
精密单点定位;函数模型;参数化;电离层先验约束;GPS+BDS
精密单点定位(PPP)是一种无需基准站、作业模式灵活、成本低、精度高的定位技术[1-2]。PPP技术利用高精度的卫星轨道和钟差及相关信息,通过精确的误差改正模型和合理的参数估计方法,为全球导航卫星系统用户提供厘米级的定位服务[3-4]。近年来,BDS系统已在亚太地区全面提供定位、导航和授时(PNT)服务,并计划于2020年完成全球覆盖的星座组建。同时,GPS系统也加快了现代化进程,使系统面向多频化、多样化应用等方面发展。随着GNSS高速发展,其应用也逐步向多系统、多频率兼容互操作的方向转变,而多系统融合的PPP能更好地发挥多系统联合定位的优势,提高定位服务的可用性和可靠性[5-8]。因此,深入研究不同的PPP函数模型有助于掌握提高PPP精度和缩短收敛时间的关键因素,也是拓展新的应用领域的重要基础。
按照电离层处理方式不同,PPP函数模型主要包括无电离层组合模型、估计电离层的非组合模型(UC)和电离层加权模型(ionosphere-weighted,IW)。无电离层组合模型包括传统的相位与伪距频率间的组合(ionosphere-free,IF)[4,9-10]和Uofc模型。Uofc模型保留IF模型中相位组合并引入两个同频率伪距与相位的无电离层组合[11-13]。相比于IF模型,Uofc模型具有观测噪声小,且保留各频率上模糊度信息等优势。但是Uofc组合导致观测值之间存在相关性,且未知参数增多。研究表明,Uofc模型与非组合模型可利用能消除电离层的满秩转换矩阵进行等价变换[10,14-15]。另外,也有学者指出采用原始观测值并将电离层延迟参数化的UC模型,除了具有保留原始观测信息和具有更小的观测噪声等优势之外,还可以充分考虑电离层的时空相关信息构建约束函数模型[16-18]。随着对电离层特性的深入研究和电离层建模精度的不断提高,顾及电离层约束的IW模型能有效且合理地增强函数模型强度、缩短收敛时间并改善定位精度[19]。
近年来,大量研究都是针对某一特定的函数模型来分析PPP的效果,鲜有文献从函数模型参数之间相关特性的角度进行深入探讨,系统性地比较3种PPP函数模型。本文从理论上详细地研究每种函数模型各类参数之间相关特性,给出3种PPP函数模型(IF模型、UC模型及IW模型)的独立参数化方式,系统性地分析3种模型相互关系,最后给出双系统定位的参数化处理方案。本文利用GPS单系统和GPS+BDS组合PPP算例分析验证理论的正确性。
1 3种PPP函数模型
1.1 非组合(UC)模型
观测s颗卫星的双频单历元UC观测方程和随机模型为
Φ=(e2⊗Ax)x+e2sdtr+(I2⊗es)Br-(e2⊗dts)-bs-(μ⊗Is)ι+(e2⊗g)τ-a+εΦ
(1a)
P=(e2⊗Ax)x+e2sdtr+(I2⊗es)Dr-
(e2⊗dts)-ds+(μ⊗Is)ι+(e2⊗g)τ+εP
(1b)
(1c)

1.2 无电离层组合模型(IF)
无电离层组合模型的观测方程是对式(1a)和(1b)两边左乘一个组合转换矩阵
设无电离层组合系数阵为
则IF组合观测方程为
ΦIF=Axx+esdtr+(J⊗es)Br-dts-
(J⊗Is)bs+gτ-(J⊗Is)a+εΦIF
(2a)
PIF=Axx+esdtr+(J⊗es)Dr-dts-
(J⊗Is)ds+gτ+εPIF
(2b)
(2c)
式中,ΦIF和PIF分别表示IF相位和伪距观测量;εΦIF和εPIF分别为对应的观测噪声;QIF为对应的方差-协方差矩阵。
1.3 顾及电离层信息的加权模型(IW)
UC模型与IF模型对电离层延迟误差的处理方式不同,UC模型将电离层延迟作为参数估计,而IF模型将它们通过观测值组合消除。随着对电离层特性的深入研究,通过引入外部的电离层信息或通过电离层建模形式对电离层延迟参数进行约束,能有效地增强UC模型的强度,进而改善模糊度的固定效率和提高定位精度[20]。
一般说来,电离层延迟误差引起的信号群延迟、多普勒频移等问题是影响GNSS精密定位的主要因素之一[21-22]。对于单频GNSS用户可以采用电离层模型消除电离层延迟,如Kloubuchar全球经验模型[21-22]。该模型的参数可从广播星历中获取,实时改正,操作方便。但由于电离层变化复杂,在不同的纬度特别是赤道和高纬度地区,影响十分显著,所以修正精度较差。相关研究指出,Kloubuchar模型的改正程度仅约为55%[23]。另外,IGS组织利用长期的全球跟踪站反演电离层信息,为用户提供二维或三维的全球格网电离层改正信息,构建全球电离层改正模型[24]。目前,IGS提供的最终电离层产品精度可以达到2~8 TECU,即为用户提供分米级的电离层改正[25]。因此,不同的电离层模型提供不同精度的电离层误差改正,对定位的收敛时间有显著的影响。
IW模型以UC模型(1)为基础,在此基础上对电离层延迟参数附加伪观测方程
(3)

2 PPP模型的独立参数化
从式(1)可以看出,UC模型的钟差、硬件延迟、电离层延迟及模糊度等参数之间存在明显的相关性,从而导致观测方程设计矩阵秩亏。而式(2)给出的IF模型同样由于参数相关而引起设计矩阵秩亏。通常有两种解决设计矩阵秩亏问题的方法,第1种方法是引入适当的外部基准,进而独立求解各类参数;第2种方法是采用合理的独立参数化方法,构造相互独立的参数进行求解。下面详细分析每个模型的参数相关性,并给出每个函数模型的独立参数化方式。
2.1 3种模型的独立参数化
由于IW模型只是在UC模型基础上增加了电离层约束信息,其独立参数化方式与UC模型相同,因此这里只讨论UC模型和IF模型的独立参数化方式。
2.1.1 UC模型的独立参数化

(4)
(5a)
(5b)
式中,卫星DCB和精密卫星钟差可从IGS发布的相应产品获取改正[26]。
下面讨论接收机钟差、接收机硬件延迟及电离层延迟的相关性及相应的处理方式。显然,Dr与dtr完全线性相关,所以只能合并估计,即新的接收机钟差为dtr=e2dtr+Dr。同时考虑到新的接收机钟差dtr与电离层延迟ι系数阵的相关关系

(6a)
(6b)
式中,D12=Dr,2-Dr,1表示两个频率间接收机伪距硬件延迟偏差。
最后讨论模糊度与硬件延迟的独立参数化方式。经过上述参数处理后,考虑到a与bs、ds完全线性相关,且顾及Br、Dr与a系数阵的相关关系
需要将硬件延迟与模糊度合并估计。整理合并后,构造新的模糊度aUC形式如下
(7)
所以,经上述各项参数之间相关性探讨,构造了相互独立的待估参数,将式(5a)、式(5b)、式(6)和式(7)代入式(1),整理后得独立参数化后的UC模型


(8a)

(e2⊗g)τ+εP
(8b)

2.1.2 IF模型的独立参数化方式
式(2)中,卫星钟差及卫星硬件延迟的形式与式(4)相同,可以通过直接引入精密卫星钟差改正。IF模型构造的接收机钟差与UC模型相同,即式(6a)。令无电离层组合模糊度aIF为

(9)
将式(6a)和式(9)代入式(2)整理后,得到独立参数化后的IF模型如下
ΦIF=Axx+esdtrIF+gτ-aIF+εΦIF
(10a)
PIF=Axx+esdtrIF+gτ+εPIF
(10b)
显然,式(10)中IF组合无法估计各频率上独立的模糊度。
2.2 3种模型的关系
为方便阐述函数模型之间的关系,将独立参数化后的UC模型式(8)表示为
(11)
2.2.1UC模型与IF模型关系
根据等价性原理[10,27],IF模型与UC模型的转换矩阵R不能同时满足条件RTC=0且rank(R)=n-t,所以IF模型与UC模型不等价。IF模型无法独立求解两个频率模糊度,从模糊度解算的角度二者也不等价[10]。事实上,4个双频伪距和相位观测方程经无电离层组合后消除了一个电离层参数,应该得到3个等价的无电离层组合方程,而传统的IF模型只保留了两个方程,舍弃了伪距与相位之间的组合方程,但是该组合观测信息对定位贡献较弱,且与伪距、相位的无电离层组合信息相关,所以二者定位精度相当。此外,由于UC模型包含的待估参数较多,导致计算效率低,同时UC模型大量参数之间的相互关系往往会导致方程性态变差,导致待估参数的数值稳定性可能较IF模型差。
2.2.2 UC模型与IW模型的关系
IW模型在UC模型式(8)的基础上增加电离层延迟的伪观测方程,增强了UC模型的强度。IW模型电离层延迟参数解算精度高于UC模型的解算精度,而电离层延迟参数解算精度直接影响其他待估参数的解算质量,从而改善定位效果。通过讨论UC模型与IW模型的电离层估计效果来分析二者之间的关系。
(12)
式中,UC模型的电离层参数估值及其协方差阵为
(13)
IW模型的位置参数最小二乘解为
(14)
式中,IW模型的电离层参数估值及其协方差阵为
(15)

3 GPS和BDS双系统组合PPP模型
随着我国BDS的迅速发展,GPS和BDS组合PPP不仅缩短了GPS单系统的收敛时间,而且增加GPS单系统PPP的可靠性和可用性。所以基于上文讨论的独立参数化的UC模型和IF模型,下面直接给出双系统组合的PPP模型。
3.1 GPS和BDS组合的UC模型
以上下标G和C区分GPS和BDS系统,则根据式(8)给出GPS和BDS组合的UC模型为

(16a)

(16b)
式中,*=“G”或“C”;其余符号含义与式(8)相同。
3.2 GPS和BDS组合的IF模型
根据式(10),GPS和BDS组合的IF模型为
(17a)
(17b)
式中,*=“G”或“C”;其余符号含义与式(10)相同。
3.3 GPS和BDS双系统组合的时空统一
多系统融合的关键性问题是需要采用统一的时间系统和坐标系统。由于GPS和BDS系统的时间基准及时延偏差存在差异,一般将BDS的时间基准统一到GPST。系统间的时延偏差,可用两种方法进行处理。一种方法是引入系统的频间偏差(ISB)参数,考虑到ISB的稳定性,一般作为常数或者分段常数进行估计[28]
dtr,C=dtr,G+ISB
(18)
另一种方法是独立估计各系统的接收机钟差,不考虑ISB[28],本文采用该方法处理。该方法处理简单且能确保估值消除时间偏差的影响,与第1种方法相比,由于每个历元都引入了两个钟差参数,导致模型强度略微偏低。另外,由于PPP采用了IGS精密轨道产品,所有轨道产品已经统一在相同的ITRF坐标参考框架,故不存在坐标转换问题。
3.4 GPS和BDS双系统随机模型
GPS和BDS观测值都采用高度角定权,同时考虑到GPS、BDS观测噪声及卫星轨道产品的精度差异,根据大量计算统计得出GPS和BDS权比为1∶0.8。此外,由于BDS的GEO卫星的静止特性,导致其与地面监测站的几何构型较差,所以GEO卫星的轨道精度比IGSO和MEO卫星低。因此,在实际应用中对GEO卫星观测值进行了适当地降权处理[29]。
图1给出的是GPS/BDS组合的PPP解算流程,采用自主开发的Multi-PPP软件,软件不仅可实现单系统PPP,还可在单系统法方程层面实现多系统融合解。
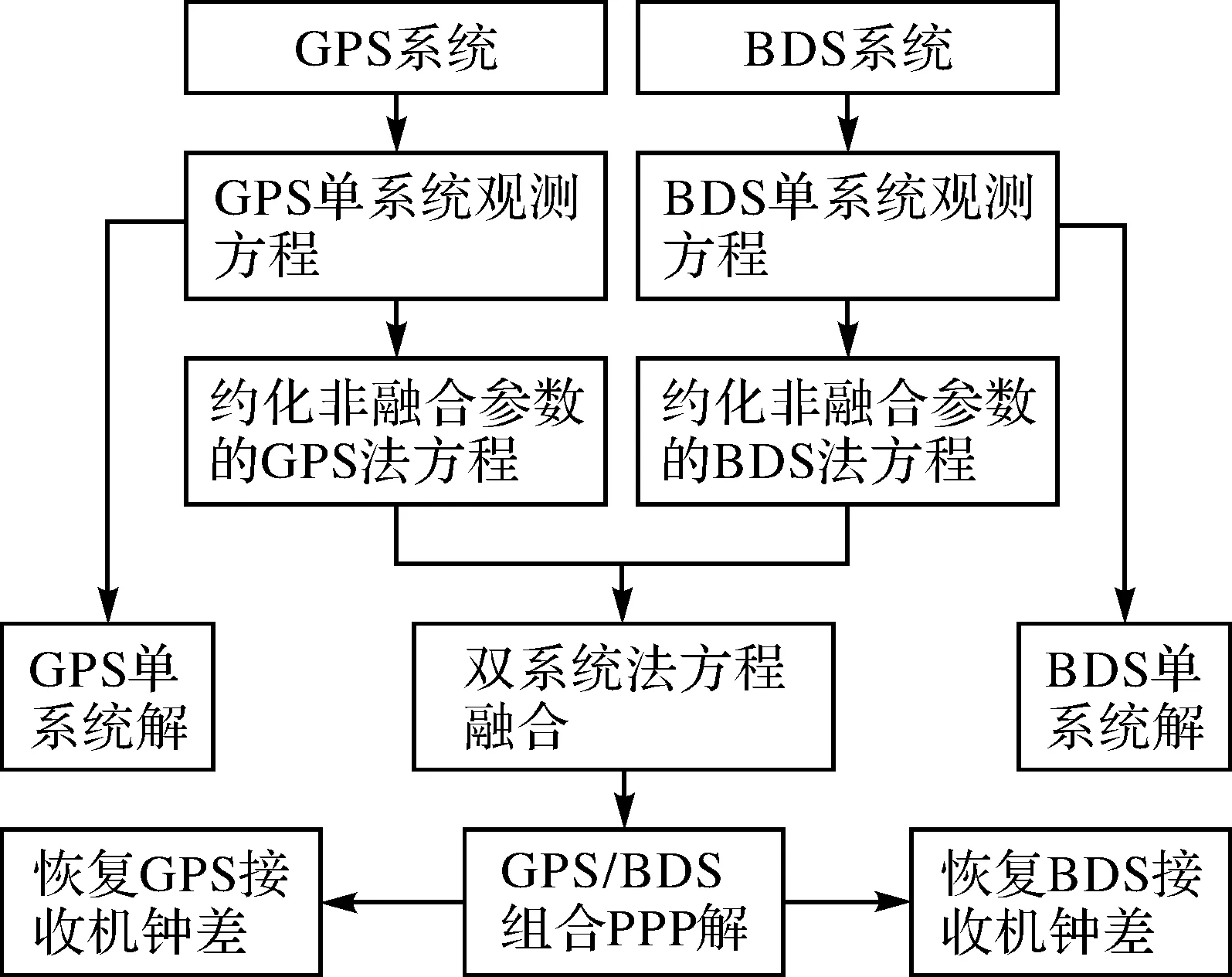
图1 GPS/BDS组合PPP数据处理流程Fig.1 The data processing flow of GPS/BDS combined PPP
4 试验分析
MGEX是IGS建立的GNSS多频多模跟踪站的试验网,本文算例选取MGEX网中同时跟踪GPS和BDS卫星较多的5个测站,分别为中国的JFNG、澳大利亚的CUT0、GMSD、KARR和MRO1。选择2015年DOY137—150数据,且采样间隔为30 s。以静态单天解作为各测站的参考坐标。轨道产品采用德国地学中心(GFZ)提供的15 min间隔的精密星历和30 s的精密钟差。电离层约束采用IGS提供的最终全球格网产品(GIMs)通过内插方式获取的电离层改正。根据GIMs产品的精度,本文取电离层伪观测值的方差为0.09 m2。试验采用静态PPP和静态数据动态PPP解算两种模式,动态解算采用卡尔曼滤波方法,状态系统的动态噪声设为白噪声[30]。统计分析北(N)、东(E)和高程(U)3个方向的定位误差和以及3个方向收敛至1 dm的时间。
4.1 静态PPP试验
算例给出3种PPP模型GPS单系统和GPS+BDS组合的静态PPP定位情况。图2为可视卫星数以及PDOP值,图3、图4分别为GPS单系统和GPS/BDS组合的IF模型(a)、UC模型(b)和IW模型(c)的静态PPP E、N、U方向的定位误差。从图中可以看出,GPS/BDS组合PPP的收敛时间相比于GPS单系统有所改善。图5为5个测站1 d平均收敛时间统计及所有测站平均收敛时间统计(a)和14 d平均收敛时间(b)。表1为3种PPP模型的平均定位精度统计结果。从图5和表1可以看出,对于静态PPP,UC模型比IF模型的收敛时间长,IW模型的收敛时间相比于IF模型和UC模型明显缩短。在定位精度方面,3种PPP模型定位精度相当,3种PPP模型的3个方向静态定位精度均优于2 cm,平面定位精度甚至优于厘米级。
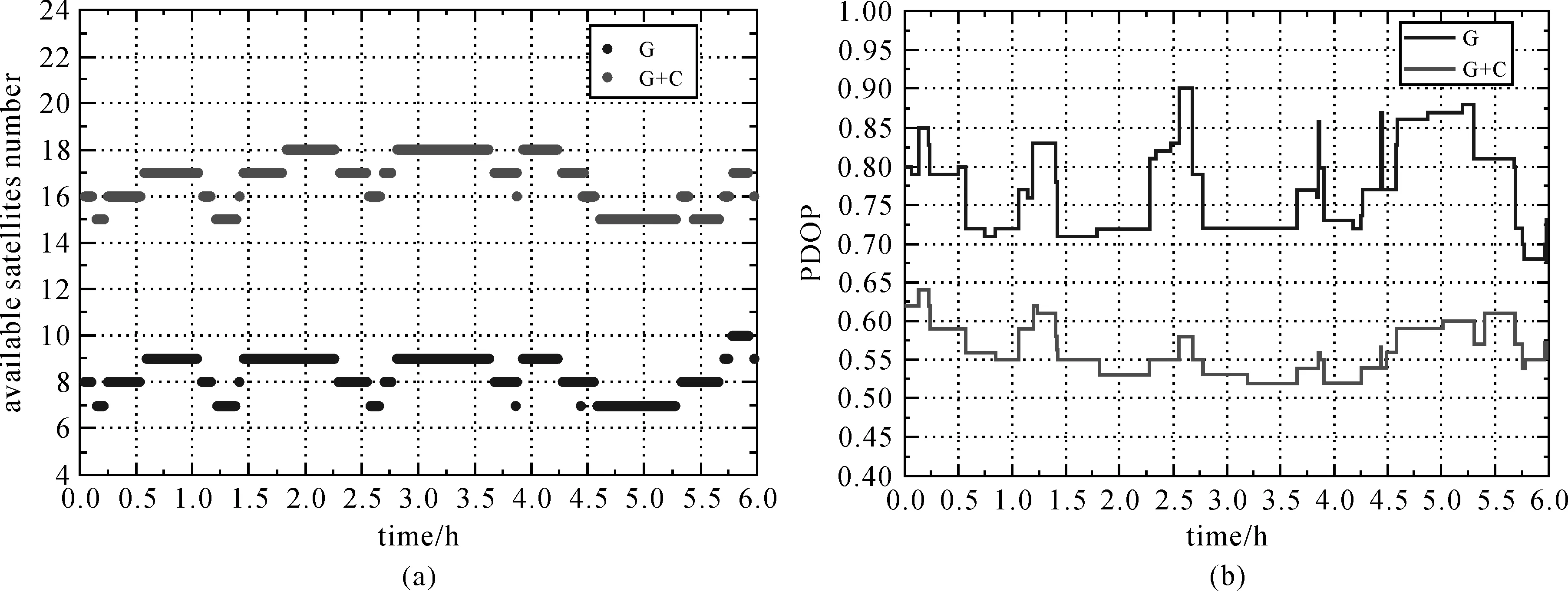
图2 JFNG站可视卫星数与PDOP值变化Fig.2 The number of available satellites and PDOP at JFNG station
图3 3种模型GPS单系统静态PPP误差Fig.3 Static PPP positioning errors of the three models with GPS-only combinations
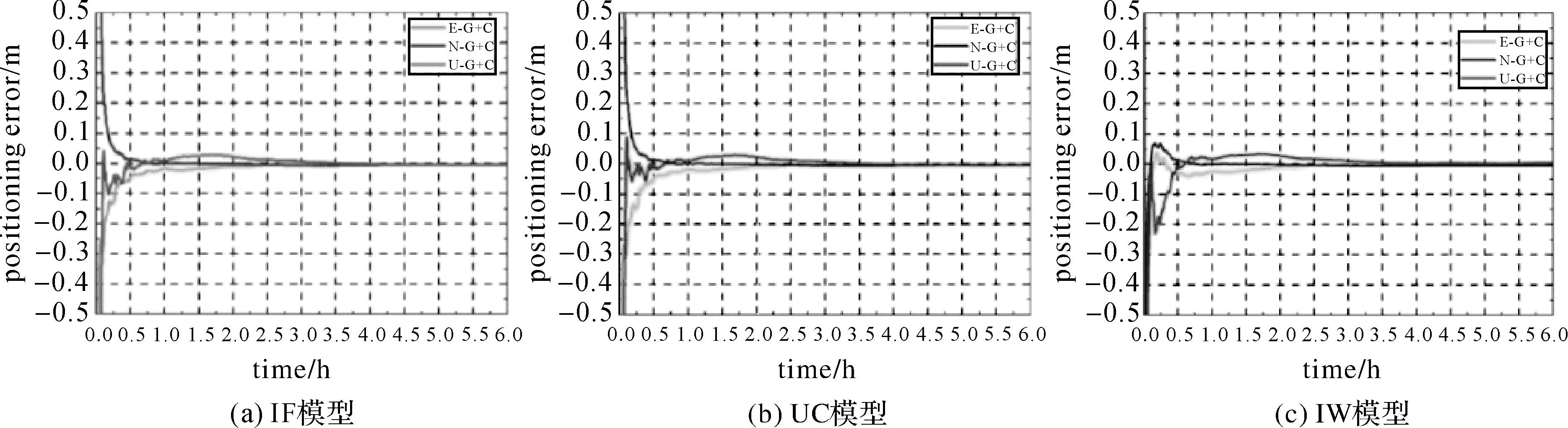
图4 3种模型GPS/BDS组合静态PPP误差Fig.4 Static PPP positioning errors of the three models with GPS/BDS combinations
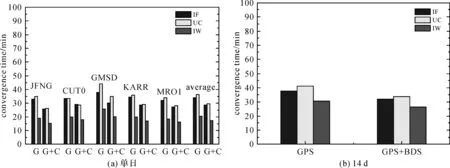
图5 GPS和GPS/BDS组合3种模型单日静态PPP收敛时间和14 d平均收敛时间Fig.5 Convergence time of 3 static PPP models with GPS-only and GPS/BDS combination for 5 stations and the average convergence time of 14 days

4.2 模拟动态PPP试验
算例给出3种PPP模型GPS单系统和GPS+BDS组合的动态PPP定位情况。图6、图7分别为GPS单系统和GPS/BDS组合的IF模型(a)、UC模型(b)和IW模型(c)的动态PPP ENU方向的定位误差。从图中可以看出,GPS/BDS组合PPP的平面方向的收敛时间相比于GPS单系统有所改善。图8为5个测站1 d平均收敛时间统计及所有测站平均收敛时间统计(a)和14 d平均收敛时间(b)。表2为3种PPP模型的平均定位精度统计结果。从图8和表2可以看出,动态PPP的收敛时间方面,UC模型比IF模型的收敛时间更长,IW模型的收敛时间相比于IF模型和UC模型明显缩短;定位精度方面,3种模型动态PPP平面均优于3 cm,高程方向优于5 cm。
5 结 论
本文从公式推导角度,详细讨论了无电离层组合模型和非组合PPP模型的独立参数化方法,并从参数估计角度,论述无电离层组合模型(IF)、非组合模型(UC)和附加电离层约束模型(IW)的相互关系。试验分析了3种模型的静态和动态解算精度以及收敛时间,得出以下结论:
(1) UC模型和IF模型的钟差、时延偏差、电离层和模糊度参数之间存在相关性,需通过独立参数化方法确定可估参数。
(2) 从参数估计角度分析,IW模型在UC模型的基础上对电离层参数进行约束,增强了模型强度,提高参数估计精度,进而缩短定位收敛时间。
(3) GPS和BDS双系统组合相比于GPS单系统有效地改善了卫星的几何构型强度,组合PPP的收敛时间明显比单系统的短。
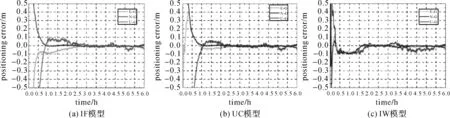
图6 3种模型GPS单系统的动态PPP定位误差Fig.6 Kinematic PPP positioning errors of the three models with GPS-only combinations
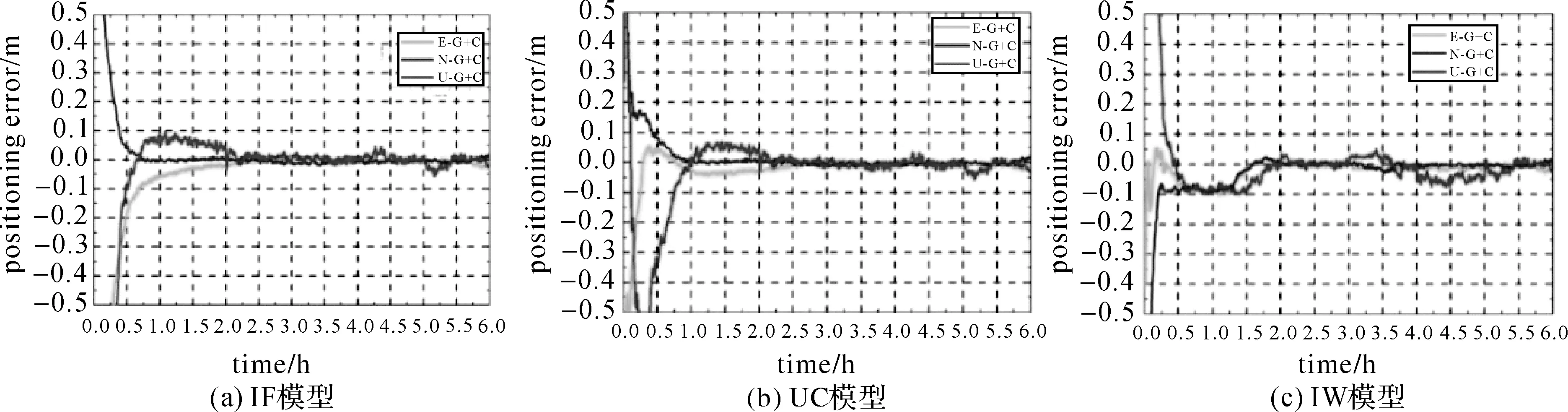
图7 3种模型GPS/BDS组合动态PPP定位误差Fig.7 Kinematic PPP positioning errors of the three models with GPS/BDS combinations
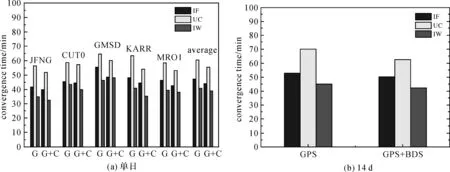
图8 GPS和GPS/BDS组合3种模型单日动态PPP收敛时间和14 d平均收敛时间Fig.8 Convergence time of 3 kinematic PPP models with GPS-only and GPS/BDS combination for 5 stations and the average convergence time of 14 days

[1] 屈利忠,赵齐乐,郭靖,等.GNSS融合动态精密单点定位性能分析[J].大地测量与地球动力学,2016,36(4):298-302.
QU Lizhong,ZHAO Qile,GUO Jing et al.Performance Analysis on Multi-GNSS Kinematic Precise Point Positioning[J].Journal of Geodesy and Geodynamics,2016,36(4):298-302.
[2] COLOMBO O L,SUTTER A W,EVANS A G.Evaluation of Precise,Kinematic GPS Point Positioning[C]∥Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2004),Long Beach,CA,USA:Long Beach Convention Center,2004:1423-1430.
[3] ZUMBERGE J F,HEFLIN M B,JEFFERSON D C,et al.Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks[J].Journal of Geophysical Research,1997,102(B3):5005-5017.DOI:10.1029/96JB03860.
[4] KOUBA J,HéROUS P.Precise Point Positioning Using IGS Orbit and Clock Products[J].GPS Solutions,2001,5(2):12-28.DOI:10.1007/PL00012883.
[5] 李星星.GNSS精密单点定位及非差模糊度快速确定方法研究[D].武汉:武汉大学,2013.
LI Xingxing.Rapid Ambiguity Resolution in GNSS Precise Point Positioning[D].Wuhan:Wuhan University,2013.
[6] 辜声峰.多频GNSS非差非组合精密数据处理理论及其应用[D].武汉:武汉大学,2013.
GU Shengfeng.Research on the Zero-difference Un-combined Data Processing Model for Multi-frequency GNSS and Its Applications[D].Wuhan:Wuhan University,2013.
[7] 李敏.多模GNSS融合精密定轨理论及其应用研究[D].武汉:武汉大学,2011.
LI Min.Research on Multi-GNSS Precise Orbit Determination Theory and Application[D].Wuhan:Wuhan University,2011.
[8] 任晓东,张柯柯,李星星,等.BeiDou、Galileo、GLONASS、GPS多系统融合精密单点[J].测绘学报,2015,44(12):1307-1313,1339.DOI:10.11947/j.AGCS.2015.20140568.
REN Xiaodong,ZHANG Keke,LI Xingxing,et al.Precise Point Positioning with Multi-constellation Satellite Systems:BeiDou、Galileo、GLONASS、GPS[J].Acta Geodaetica et Cartographica Sinica,2015,44(12):1307-1313,1339.DOI:10.11947/j.AGCS.2015.20140568.
[9] KOUBA J.A Guide to Using International GNSS Service (IGS) Products[J].IGS Central Bureau,Pasadena,2009.http:∥igscb.jpl.nasa.gov/components/usage.html.
[10] 李博峰,葛海波,沈云中.无电离层组合、Uofc和非组合精密单点定位观测模型比较[J].测绘学报,2015,44(7):734-740.DOI:10.11947/j.AGCS.2015.20140161.
LI Bofeng,GE Haibo,SHEN Yunzhong.Comparison of Ionosphere-free,Uofc and Uncombined PPP Observation Models[J].Acta Geodaetica et Cartographica Sinica,2015,44(7):734-740.DOI:10.11947/j.AGCS.2015.20140161.
[11] GAO Y,SHEN X.Improving Ambiguity Convergence in Carrier Phase-based Precise Point Positioning[C]∥Proceedings of the 14th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS-2001).Salt Lake City,USA:Salt Palace Convention Center,2001:1532-1539.
[12] 阮仁桂,郝金明,张勇.基于UofC模型的精密单点定位精度分析[J].大地测量与地球动力学,2009,29(6):104-108.
RUAN Rengui,HAO Jinming,ZHANG Yong.Evaluation of Precise Point Positioning with UofC Model[J].Journal of Geodesy and Geodynamics,2009,29(6):104-108.
[13] 蔡昌盛,戴吾蛟,匡翠林,等.利用UofC消电离层组合的GPS/GLONASS精密单点定位研究[J].武汉大学学报(信息科学版),2012,37(7):827-830.
CAI Changsheng,DAI Wujiao,KUANG Cuilin,et al.Study on GPS/GLONASS Precise Point Positioning Using UofC Ionosphere-free Combination[J].Geomatics and Information Science of Wuhan University,2012,37(7):827-830.
[14] SCHAFFRIN B,GRAFAREND E.Generating Classes of Equivalent Linear Models by Nuisance Parameter Elimination[J].Manuscripta Geodaetica,1986(11):262-271.
[15] XU Guochang.GPS Data Processing with Equivalent Observation Equations[J].GPS Solutions,2002,6(1-2):28-33.
[16] 张宝成.GNSS非差非组合精密单点定位的理论方法与应用研究[D].武汉:中国科学院测量与地球物理研究所,2012.
ZHANG Baocheng.Study on the Theoretical Methodology and Applications of Precise Point Positioning Using Un-differenced and Uncombined GNSS Data[D].Wuhan:Institute of Geodesy and Geophysics,Chinese Academy of Sciences,2012.
[17] LOU Yidong,ZHENG Fu,GU Shengfeng,et al.Multi-GNSS Precise Point Positioning with Raw Single-frequency and Dual-frequency Measurement Models[J].GPS Solutions,2016,20(4):849-862.
[18] LI Xingxing,ZHANG Xiaohong,REN Xiaodong,et al.Precise Positioning with Current Multi-constellation Global Navigation Satellite Systems:GPS,GLONASS,Galileo and BeiDou[J].Scientific Reports,2015,5:8328.
[19] LI Bofeng,LI Zhen,ZHANG Zhiteng,et al.ERTK:Extra-wide-lane RTK of Triple-frequency GNSS Signals[J].Journal of Geodesy,2017,91(9):1031-1047.
[20] LI Bofeng,SHEN Yunzhong,FENG Yanming,et al.GNSS Ambiguity Resolution with Controllable Failure Rate for Long Baseline Network RTK[J].Journal of Geodesy,2014,88(2):99-112.
[21] KLOBUCHAR J A.Ionospheric Time-delay Algorithm for Single-frequency GPS Users[J].IEEE Transactions on Aerospace and Electronic Systems,1987,AES-23(3):325-331.
[22] KLOBUCHAR J A.Ionospheric Effects on GPS[M]∥SPILKER Jr J J,AXELRAD P,PARKINSON B W,et al.Global Positioning System:Theory and Applications.AIAA,1996(1):485-515.
[23] 袁运斌.基于GPS的电离层监测及延迟改正理论与方法的研究[D].武汉:中国科学院测量与地球物理研究所,2002.
YUAN Yunbin.Study on Theories and Methods of Correcting Ionospheric Delay and Monitoring Ionosphere Based on GPS[D].Wuhan:Institute of Geodesy and Geophysics,Chinese Academy of Sciences,2002.
[24] FELTENS J,SCHAER S.IGS Products for the Ionosphere[C]∥Proceedings of the 1998 IGS Analysis Center Workshop.Darmstadt,Germany,1998.
[25] IGS MGEX.http:∥mgex.igs.org/IGS_MGEX_Products.html.
[26] MONTENBRUCK O,STEIGENBERGER P,KHACHIKYAN R,et al.IGS-MGEX:Preparing the Ground for Multi-Constellation GNSS Science[J].Inside GNSS,2014,9(1):42-49.
[27] LI Bofeng,TEUNISSEN P J G.GNSS Antenna Array-aided CORS Ambiguity Resolution[J].Journal of Geodesy,2014,88(4):363-376.
[28] TU Rui,GE Maorong,ZHANG Hongping,et al.The Realization and Convergence Analysis of Combined PPP Based on Raw Observation[J].Advances in Space Research,2013,52(1):211-221.
[29] LI Bofeng.Stochastic Modeling of Triple-frequency BeiDou Signals:Estimation,Assessment and Impact Analysis[J].Journal of Geodesy,2016,90(7):593-610.
[30] 杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006.
YANG Yuanxi.Adaptive Navigation and Kinematic Positioning[M].Beijing:Surveying and Mapping Press,2006.
Comparison and Analysis of Three GPS+BDS PPP Models
ZANG Nan1,LI Bofeng1,2,SHEN Yunzhong1
1. College of Surveying and Geo-Informatics,Tongji University,Shanghai 200092,China; 2. State Key Laboratory of Geodesy and Earth’s Dynamics,Institute of Geodesy and Geophysics,Chinese Academy of Sciences,Wuhan 430077,China
In general,ionosphere-free model and uncombined model are applied for GNSS precise point positioning (PPP).This paper detailed analyzes the correlation of different parameters of each model,and deducevarious PPP functional model by means of parameterization methods.And uncombined PPP with ionospheric parameter constrains i.e.ionosphere-weighted model can fasten PPP convergence effectively.This paper takes advantage of GPS-only and GPS and BDS combination dataset as example for positioning in different PPP models.In the perspective of positioning accuracy and convergence time,positioning performance are detailed analyzed in both static PPP and simulated dynamic PPP modes.The results demonstrate that GPS-only has the similar accuracy with GPS+BDS combination,and both ionosphere-free model and uncombined model static PPP can achieve the positioning accuracy of millimeter to centimeter level,while the horizontal positioning accuracy of dynamic PPP is superior to 3 cm and the vertical positioning accuracy is superior to 5 cm.In terms of convergence time,ionosphere-free model is superior to uncombined model,and the convergence time of ionosphere-weighted model is the shortest.Compared to the ionosphere-free model,the ionosphere-weighted model can decrease about 15% convergence time,while it can decrease about 34% convergence time compared to the uncombined model in the dynamic positioning.
PPP;functional model;parameterization;prior ionospheric constrains;GPS+BDS
The National Natural Science Foundation of China (Nos.41622401;41574031;41374023);The Open Fund of the State Key Laboratory of Geodesy and Earth’s Dynamics(No.SKLGED2016-3-1-EZ)
ZANG Nan(1989—),female,PhD candidate,majors in multi-GNSS and multi-frequency PPP.
LI Bofeng
E-mail: bofeng_li@tongji.edu.cn
臧楠,李博峰,沈云中.3种GPS+BDS组合PPP模型比较与分析[J].测绘学报,2017,46(12):1929-1938.
10.11947/j.AGCS.2017.20170111.
ZANG Nan,LI Bofeng,SHEN Yunzhong.Comparison and Analysis of Three GPS+BDS PPP Models[J]. Acta Geodaetica et Cartographica Sinica,2017,46(12):1929-1938. DOI:10.11947/j.AGCS.2017.20170111.
P228
A
1001-1595(2017)12-1929-10
国家自然科学基金(41622401;41574031;41374023);大地测量与地球动力学国家重点实验室开放研究基金(SKLGED2016-3-1-EZ)
丛树平)
2017-03-09
2017-07-03
臧楠(1989—),女,博士生,研究方向为多模多频精密单点定位。
E-mail: zang6050@163.com
李博峰