基于RecurDyn和MATLAB的坦克底盘-火炮系统动力学联合仿真研究
2018-01-02郝丙飞王红岩李善乐
郝丙飞, 王红岩, 芮 强, 李善乐
(装甲兵工程学院 机械工程系 北京100072)
基于RecurDyn和MATLAB的坦克底盘-火炮系统动力学联合仿真研究
郝丙飞, 王红岩, 芮 强, 李善乐
(装甲兵工程学院 机械工程系 北京100072)
为了对坦克底盘-火炮系统中火炮的振动特性进行准确描述,提出应用多软件联合仿真的方法,分别基于RecurDyn和MATLAB建立坦克底盘多体动力学模型和炮控系统模型,二者相结合建立联合仿真系统模型;在稳定工况下,对坦克底盘-火炮系统高低向俯仰角振动特性进行仿真研究.结果表明:随路面不平度的增大和坦克行驶速度的提高,火炮高低向误差角变大,稳定性变差;所建联合仿真模型能够很好的模拟火炮的高低向俯仰角振动,联合仿真方法提高了模型的准确度和计算效率,为坦克在不同行驶条件下进行火炮射击提供了定位范围参考.
坦克底盘-火炮系统;联合仿真;高低向误差角;振动响应
1 坦克底盘-火炮系统模型的建立
1.1 建立坦克底盘多体动力学模型
建立坦克底盘多体动力学模型主要以行动系统为主,其它分系统简化为车体系统的部分质量和惯量,行动系统主要包括主动轮、负重轮、托带轮、诱导轮以及曲臂型履带张紧机构、履带和悬挂系统弹簧元件及阻尼元件等[7],各部件之间通过特定运动副、运动关系连接.参考文献[7]的建模分析方法,建立坦克底盘多体动力学模型如图1所示.

图1 坦克底盘多体动力学模型
1.2 坦克底盘多体动力学模型试验验证
为了验证所建坦克底盘模型的可信性,坦克低速1挡通过汽车试验平台进行实车试验,试验测试装置及试验路况如图2所示,包括NI多通道数据采集系统、振动加速度传感器、以及测量主动轮转速的光电传感器.
实车试验过程中,NI数据采集系统记录振动加速度传感器的振动信号和光电传感器的转速脉冲信号.试验过程中测得坦克主动轮转速,加载到仿真模型主动轮上,驱动所建坦克底盘模型.

图2 实车试验测试装置及试验场地
图3给出了实车试验过程中第1负重轮上方车体的垂向振动加速度的试验结果与仿真结果.通过对加速度信号基于welch法进行功率谱估计,分析图3(c)可得,仿真计算和实车试验的峰值频率分别为1.61 Hz和1.56 Hz,该峰值频率为底盘的垂向振动固有频率[8].仿真与试验结果非常相近,表明仿真与试验结果吻合较好,验证了坦克底盘模型的可信性.

图3 第1负重轮上方坦克车体上垂向振动加速度及其功率谱
1.3 建立坦克底盘-火炮系统模型
稳定工况下,坦克在越野路面上行驶,火炮轴线相对瞄准线(假定坦克行驶过程中瞄准角不发生变化)在高低向会产生小角度的偏移,在炮控系统稳定器的稳定控制作用下,液压系统驱动火炮消除偏差角.
图4中给出炮控系统受力分析示意图,将动力油缸简化为一阶弹簧阻尼系统.等效刚度为Kd,等效粘性摩擦阻尼为Cd,驱动部件(活塞和活塞杆)简化为一阶质量md.

图4 火炮高低向俯仰角振动炮控系统受力分析模型
火炮高低向瞄准角的范围很小(-6°~14.5°),火炮在耳轴处所受的纵向力驱动火炮沿前进方向水平运动,对火炮的稳定精度影响较小[9],忽略不计.仅考虑耳轴的垂向作用力Fz;耳轴处等效粘性阻尼为Ctp;系统各部分的动力学方程如下.
驱动部分:

(1)
式中:zd为活塞驱动部分相对缸壁的移动距离;Xtp为油缸在摇架上的驱动点到耳轴中心的距离;θ1为火炮绕质心的转角;θp为坦克底盘绕质心的转角.
火炮部分:
(2)
式中:m为火炮的质量;Z1为火炮的垂向振动位移;J1为火炮绕质心的转动惯量;L1为火炮质心到耳轴中心的距离.
耳轴与火炮质心位置处的几何约束关系为:
Zt=Z1-θ1L1.
(3)
以上动力学方程可以写成广义方程的形式:
(4)
式(4)中的质量矩阵M1、阻尼矩阵C1、刚度矩阵K1和输入矩阵I1等表达如下:
广义方程的变量向量组和输入向量分别为:
{θ}T={zdθ1}.
(5)

(6)
模型的状态方程表达方式如下:

,
(7)
式中:

(8)
通过上述炮控系统的受力分析建立坦克底盘-火炮系统状态方程,状态空间输入量分别为耳轴点所受的垂向力、耳轴点垂向振动加速度激励和坦克底盘的俯仰角位移和角速度;输出量分别为动力油缸活塞的位移及速度变量和火炮的俯仰角位移及角速度变量.
综上理论分析,得到坦克底盘-火炮系统高低向闭环控制结构原理图如图5所示.

图5 火炮高低向炮控系统模型结构框图

2 联合仿真平台的建立
为了提高坦克底盘-火炮系统动力学仿真计算的效率,利用RecurDyn和MATLAB/Simulink联合仿真技术,建立联合仿真系统模型.
建立联合仿真模型最重要的是输入输出接口关系的确定.Recurdyn的输入输出是与MATLB建立的控制系统进行数据交换的接口,RecurDyn的输出变量是进入MATLAB控制系统的输入变量,RecurDyn的输入变量是从MATLAB反馈回来的控制变量.Recurdyn中自带Recurdyn/Control模块,将RecurDyn中建立的机械系统模型和MATLAB控制系统模型有机的结合起来,进行机械系统和控制系统的联合仿真.
RecurDyn中主要完成坦克底盘动力学模型的建立和定义输入输出,MATLAB中主要完成控制系统建模和联合仿真求解.


图6 联合仿真系统模型
联合仿真系统模型将坦克底盘子系统与炮控子系统进行有机结合生成坦克底盘-火炮系统模型,运用MATLAB解算器进行求解计算.
3 实例仿真分析
仿真工况:炮控系统开启,D级典型路面,平均车速分别为10 km/h(1挡)、15 km/h(2挡)和25 km/h(3挡).火炮的瞄准角为0°,稳定工况下仿真结果及对比分析见图7、8、9所示.
图7中,对D级路面稳定工况下坦克底盘和火炮的俯仰角振动特性进行了对比,发现火炮的俯仰角位移和俯仰角速度相比坦克底盘振幅小很多,充分表明炮控系统对稳定工况下的火炮具有良好的稳定作用,验证所建坦克底盘-火炮系统模型的可信性.

图7 D级路面2挡坦克底盘和火炮的俯仰振动对比
图8中,D级路面、车速为15 km/h的工况下,图(a)和图(b)分别给出了仿真过程中火炮高低向误差角随时间的变化和关于高低向误差角的基于welch法的功率谱估计.观察发现:火炮高低向误差角在-4×10-3rad~4×10-3rad之间变化,误差角范围为炮长在该工况下进行火炮射击提供可以量化的判断依据.通过图9(b)的分析可得,炮控系统是一个主特性为二阶的线性系统,对高频扰动的稳定性较好,对2 Hz以下的低频稳定性较差,这与试验吻合较好[5].

图8 典型工况下驱动系统和火炮的动力学特性
图9(a)和(b)分别给出了两种工况下火炮的高低误差角对比结果,图(a)表明:当坦克以相同的速度15 km/h在D、E两种不同的路面上稳定行驶时,火炮高低向误差角随路面不平度的增大而增大.图(b)表明:当坦克以两种不同挡位的速度在同样的路面上行驶时,火炮高低向误差角随车速的提高而增大.
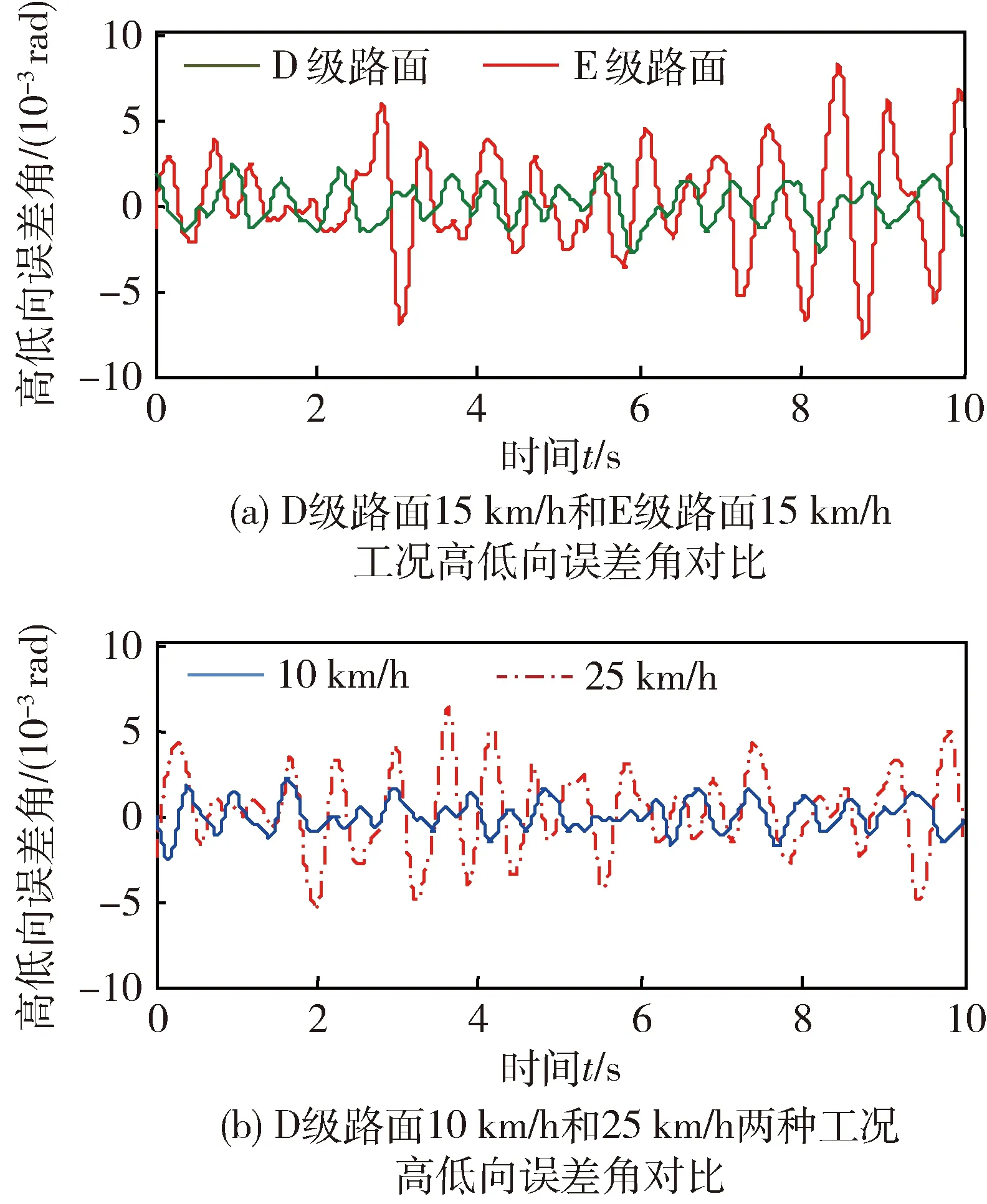
图9 典型工况下火炮的高低向误差角特性
4 结 论
基于Recurdyn和MATLAB/Simulink环境建立了坦克底盘-火炮系统联合仿真模型,对火炮的振动特性进行了仿真分析,结论如下:
1)建立联合仿真模型进行联合仿真计算,交互性较好,接近物理实际,与近似线性化的数学解析模型相比精度较高,为以后物理样机的试验研究提供了新的途径.
2)稳定工况下,炮控系统是一个主特性为二阶的线性系统,对大于2 Hz高频扰动的稳定性较好,低频稳定性较差,仿真结果为火炮的射击提供了量化的误差角范围.
3)路面不平度和行驶速度是影响火炮稳定性的两个重要因素,相同的行驶速度下,E级路况火炮的误差角是D级路况的2倍左右.而同为D级路况条件,25 km/h速度下火炮的误差角是10 km/h速度下火炮误差角的3倍以上.充分表明火炮的稳定性随车速和路况成非线性规律变化.所建坦克底盘-火炮系统模型为火炮在不同工况下的稳定性的评估提供了参考.
[1] 史力晨,王良曦,张兵志.坦克-火炮系统行驶间振动建模与仿真[J].兵工学报,2003,24(4):442-446.
[2] 居乃鵕.装甲车辆动力学分析与仿真[M].北京:国防工业出版社,2002.
[3] 史力晨,王良曦,张兵志.车载火炮系统动力学仿真[J].系统仿真学报,2004,16(3):366-369
[4] 孙晓博,单东升,周启煌,等.战车炮控系统动力特性的仿真研究[J].火炮发射与控制学报,2000(2):32-36.
[5] 朱昀炤,周启煌,汤霞清,等.坦克火炮动态姿态数据的测量与分析[J].装甲兵工程学院学报,1997,11(3):38-43.
[6] 周启煌,单东升.坦克火力控制系统[M].北京:国防工业出版社,1997.
[7] 王钦龙,王红岩,芮 强.基于多目标遗传算法的高速履带车辆动力学模型参数修正研究[J].兵工学报,2016,37(6):969-978.
[8] 丁法乾.履带式车辆悬挂系统动力学[M].北京:国防工业出版社,2004.
[9] 李长兵,袁 东,马晓军,等.高速机动条件下坦克火炮系统扰动力矩谱研究[J]. 兵工学报, 2015, 36(4):582-589.
DynamicsCo-simulationofTankChassis-gunSystemBasedonRecurDynandMATLAB
HAO Bing-fei, WANG Hong-yan, RUI Qiang, LI Shan-le
(Department of Mechanical Engineering, Academy of Armored Force Engineering, Beijing 100072,China)
In order to describe the vibration characteristics of the gun in a tank chassis-gun system, a method of the multi-software co-simulation is put forward. The joint simulation system model is established by the combination of a multi-body dynamics model for the chassis in RecurDyn and a control system model for the gun in MATLAB. The vibration characteristics of the pitch angles in the chassis-gun system are simulated under a steady condition. The results show that the pitch error angle of the gun becomes larger and its stability worse with the increase of both the road roughness and the tank speed. The established model can well simulate the pitch vibration of the gun, the combination method improves the accuracy and the computational efficiency, and the research idea provides a referenced mil range for gun firing under different driving conditions.
tank chassis-gun system; dynamics co-simulation; pitch error angle; vibration response
1009-4687(2017)04-0028-05
2017-05-11
郝丙飞(1992-),男,硕士,研究方向为车辆工程.
TJ391.9
A