不完全微分型PID算法在电液执行机构控制中的应用
2017-12-29冯子通马佳佳
冯子通,王 勇,马佳佳
(四川大学 电子信息学院,四川 成都 610065)
不完全微分型PID算法在电液执行机构控制中的应用
冯子通,王 勇,马佳佳
(四川大学 电子信息学院,四川 成都610065)
介绍了常规PID算法与常规不完全微分型PID算法的区别,以及常规不完全微分型PID算法的优点及其在电液执行机构控制中的应用。测试结果表明常规不完全微分型PID控制算法具有更好的调节作用。
PID算法;不完全微分型PID算法;电液执行机构
0 引言
电液执行机构在工业控制自动化中应用比较广泛,它是一种综合液压、计算机控制、电子等多种技术的动力装置,主要由控制部分和液压部分构成[1]。电液执行机构具备电动执行机构和液动执行机构的双重优势,它既有电动执行机构的控制精度高、抗偏差能力强、体积小等优点,又具备液动执行机构推动力大、传动稳定快速等优点。PID控制在电液执行机构控制中的应用是最广泛、最成功的。PID控制是对偏差信号进行比例、积分和微分运算变换后形成的一种控制规律。在很多情况下,PID控制并不一定需要全部三项控制作用,而可以灵活地改变不同组合控制策略,实施P、PI、PD和PID控制。PID调节器技术已经非常成熟,它不需要建立数学建模就能使控制的效果非常好。本文中电液执行机构所控制的系统是一种常见的时延、不确定、非线性系统,无法以精确的建模对其进行描述。被控系统的这些特点会影响到整个系统的控制精度和稳定性,因此使用合适的控制算法对于提高整个系统的控制精度和稳定性是十分必要的。本文在常规的PID算法的基础上进行改进,采用不完全微分PID算法控制方式用于对被控系统进行控制,使系统达到了预期的效果。
1 电液执行机构简介
执行机构按动力类型可划分为气动、电动、电液等几类。气动执行机构在有气源的条件下结构简单,动作迅速,维护方便,安全可靠,是当今应用最多的执行机构,但是气动执行机构受气源稳定性影响较大且控制精度较低;电动执行机构体积小,使用方便,调节控制时定位精度高,但是其实现大驱动力比较困难,且存在响应速度慢、使用寿命短和维护量大的问题;电液执行机构能够很容易地实现大驱动力控制,高精度的调节控制和快速开关控制。
电液执行机构是由相关电控模块和液压动力模块构成的,电液执行机构的结构如图1所示,其中电控模块主要由控制器及外围接口和电机驱动模块构成,液压动力模块主要由电机、齿轮泵、邮箱、加热组件构成。

图1 电液执行机构的结构示意图
电液执行机构是在控制模块中采用微处理器控制技术,运用控制算法,让控制过程和执行过程结合到最优。电液执行机构采用的是闭环控制的方式[2],对控制模块发送多种控制信号,然后与阀门反馈回来的位移信号进行比较得到两者之间的偏差,通过计算的偏差发送控制指令控制电机驱动模块,电机驱动模块再对液压动力模块通过线性位移输出力或者角位移的力矩这种方式驱动想要控制的对象,同时通过反馈的位移部分完成整个调节过程。
2 常规PID控制算法
常规PID控制算法主要由比例、积分和微分三部分构成,它是一个闭环的控制算法[3]。PID控制具有容易控制、方便调整和精度高等优点,通过PID控制可以大大提高系统的稳定性,能够通过减小控制过程中产生的误差来提高控制精度,对于电液执行机构的控制过程有一个较好的控制效果。常规PID控制系统原理图如图2所示。

图2 PID控制系统原理框图
图2中,PID控制系统由PID控制器和被控对象组成。给定被控输入信号r(t)与被控对象的实际状态信号y(t)相比得到一个偏差量e(t),通过比例、积分和微分调节对其进行调节然后得到一个输出u(t)。在电液执行机构的控制过程中通过采集的电液机的位置与发送命令得到的位置信息对比得到一个偏差量,然后通过PID控制系统的调节得到一个实际的输出信号量。其中PID控制器的输出输入关系可以表示如下:
(1)
在实际应用当中通过计算机软件实现的数字PID控制器由位置型PID和增量型PID控制器构成。其控制原理是通过采样来实现模拟数字化,表达式如下:

(2)
其中
uP(n)=kpe(n)
(3)
(4)

(5)
式(3)和(4)分别表示比例项和积分项,由式(5)可见,位置型的PID控制器每次输出的控制量都与过去发生状态有直接联系,由于每次累计的e(n)值都在进行相加,因此会导致积分过于饱和,开始和结束的时候都会产生溢出的情况,从而会导致被控对象产生的振荡很大。
对于式(2)可以变形为:
(6)
式(2)与式(6)相减结果如下:

(7)
令
Δe(n)=e(n)-e(n-1)
(8)
Δe(n-1)=e(n-1)-e(n-2)
(9)
式(7)可以变形为:
Δu(n)=kpΔe(n)+kie(n)+kd(Δe(n)-Δe(n-1))
(10)
其中:
(11)
由式(8)~(10)可以知,增量型PID控制只需要三次数据就能得到控制的输出量,因此只与三个时刻的差值有关。增量型PID控制的优势在于消耗的内存少、节省时间,且每次只需要对Δu(n)进行计算,产生的误差小,对比位置型PID控制器,其对被控对象的影响更小,不会对被控对象产生较大的冲击。
3 不完全微分型PID算法的实现
PID控制器中比例、微分、积分三个调节分别对被控对象产生不同的影响。比例调节主要是成比例地反映控制系统的偏差,一旦产生偏差,控制器就会立即产生抑制作用,以减少偏差。积分调节主要是对输入和输出的偏差进行积分,只要偏差一直存在,就会产生相应的控制量并对被控量产生影响,其主要是为了减小静差。微分调节主要是对偏差的变化进行控制,并使偏差消失在萌芽状态[4]。由此可以知道对于不同的PID参数设置会导致系统控制性能的差别,所以对于算法中的PID参数的设定就显得十分重要。
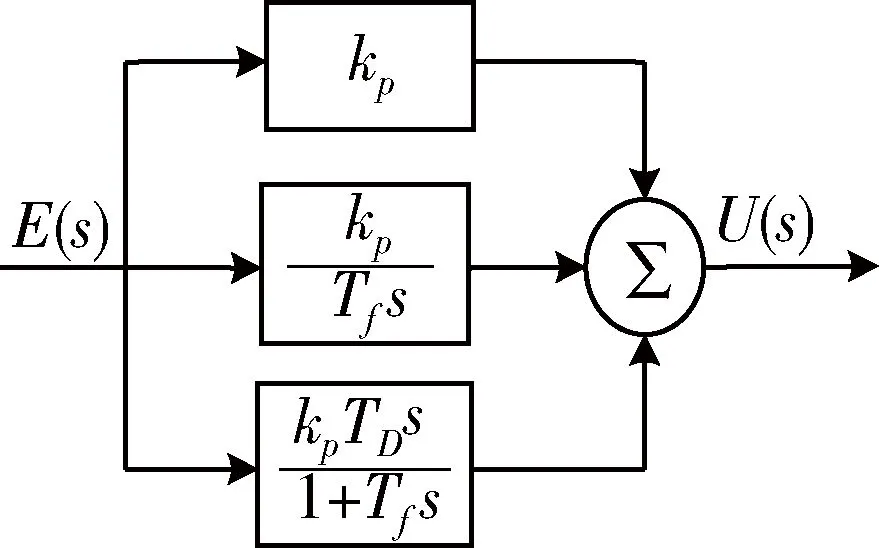
图3 常规不完全微分型PID算法结构图

(12)
常规不完全微分型PID算法结构图3所示。
由图3中可以得到其传递函数为:

(13)
将式(13)进行离散化处理可得:
u(k)=up(k)+uI(k)+uD(k)
(14)
其中:
(15)
式(15)拉普拉斯反变换为:

(16)
对式(16)进行离散化处理:

(17)
对式(17)整理得:

(18)

表1 控制算法距离增大测试结果
令

(19)
式(19)代入式(18)得:
uD(k)=kD(1-a)(error(k)-error(k-1))+
auD(k-1)
(20)
由式(20)可以看出微分部分uD(k)中多出了一项αuD(k-1),并且微分系数由kD降至kD(1-α)。
常规不完全微分PID算法相对于常规PID算法不仅可以抗高频干扰,还同时可以避免常规PID算法中微分调节过大、时间短等缺点,具有更加良好的调节作用。
常规不完全微分PID控制算法的数据结构如下:

常规不完全微分PID控制算法的部分代码如下:

4 不完全微分PID控制算法的测试
通过对常规不完全微分PID控制算法函数进行初始化后,电液执行机构的主控模块通过发送控制指令给电机驱动模块,从而控制电机运转使电液机到达指定位置,同时对电液机的实际位置信息进行采集,两者通过常规不完全微分PID控制算法进行计算不断得到输出量[5]。测试过程包括控制位置信息测试、实际位置信息测试、电机的运转速度测试,主要的测试结果如表1、表2所示。
将测试的电液数据通过曲线的形式表示如图4所示。
从图4可以看出,当向主控模块发送控制命令对电液机的位置从小到大进行设置的时候,当前电机速度被加大到正向最大量对电液机进行控制,这时从电液机采集到的实际位置信息逐渐平稳地向设定值靠近,当接近设定值时,电机速度开始反向进行缓慢减速直至采取电液机的实际位置信息和设置位置信息相同(在误差范围内),电机的当前速度就会为0,意味着电机停止运转,最终达到了控制的目的。在将控制的位置信息从大到小进行设置的时候控制模式一样。

表2 控制算法距离减小测试结果

图4 电液测试曲线图
5 结论
本文采用的常规不完全微分PID控制算法对电液机的调节,调节速度快、时间短、过程平缓稳定且控制的精度高,对电液机的控制效果明显。
[1] 何少炜,皮嘉立.基于多系统联合仿真技术的液压系统研究[J].电子测试,2016(10):15-17.
[2] 罗丽宾.智能阀门控制器的研究[J].中国机械,2014(8):155-156.
[3] 潘亮,周武能,张扬.基于模糊PID主从式方法的多电机同步控制[J].微型机与应用,2016,35(15):5-7.
[4] 郝建立,朱龙英,成磊,等.串联机器人轨迹跟踪控制模糊自适应PID算法的误差修正[J].电子技术应用,2015,41(1):60-63,67.
[5] ASTROM K J,HAGGLUND T. PID controllers: theory,design and tuning[M]. Instrument Society of America ,1995.
Application of conventional incomplete differential type PID algorithmin electro-hydraulic actuator control
Feng Zitong,Wang Yong,Ma Jiajia
(School of Electronic and Information Engineering,Sichuan University,Chengdu 610065,China)
This paper introduces the difference between conventional PID algorithm and conventional incomplete differential PID algorithm,and the advantages of conventional incomplete differential PID algorithm and its application in electro-hydraulic actuator control. The final test results show that the conventional incomplete differential PID control algorithm has a better regulation effect.
PID algorithm; incomplete differential type PID algorithm; electro-hydraulic actuator
TP273
A
10.19358/j.issn.1674-7720.2017.24.002
冯子通,王勇,马佳佳.不完全微分型PID算法在电液执行机构控制中的应用J.微型机与应用,2017,36(24):4-7.
2017-06-18)
冯子通(1991-),男,硕士研究生,主要研究方向:算法设计。
王勇(1967-),男,博士,副教授,主要研究方向:集成电路设计。
马佳佳(1992-),男,硕士研究生,主要研究方向:信号理论与信息处理。
