激光式铅球核心力量训练及量化监控装置的开发和设计
2017-12-27夏国滨
李 骥,夏国滨
(哈尔滨师范大学)
0 引言
随着科学技术的不断发展,各领域的科技成果和技术手段不断应用在体育运动训练中,从数字化的高速摄像机到数字全息技术的应用,再到离散化的有限元法仿真分析,使体育成为交叉学科的典范.运动训练与现代科技相融合并共同发展的模式已经成为新常态,也为铅球运动科学化的训练指明了道路.
铅球是一种速度力量型投掷运动项目,它以绝对力量为基础,速度为核心,特别是对稳定重心及上下肢力量的传递要求很高,如何在不稳定状态下进行稳定的核心力量训练成为解决此问题的关键.基于此,该文研制了一种与铅球投掷最后用力阶段特征相吻合的核心训练辅助设备——激光式铅球核心力量训练及量化监控装置,可以进行铅球的核心力量训练并对运动员练习时的稳定状态进行量化监控,使运动员体能训练达到最优化.
1 技术背景和设计思路
核心力量一般是指以稳定人体腰椎、骨盆、髋关节等核心部位、控制重心、维持平衡及传递上下肢力量为主要目的的力量能力.核心力量训练强调神经对相关肌肉的控制和支配、特别是大肌肉群与小肌肉群的协作,重视力量与协调性、柔韧性之间的联系[1].目前,核心力量训练在各种专项训练中均得到重视,训练方法体系日趋完善[2].对铅球这种运动持续时间短、技术性难度复杂的项目来说,更应重视核心力量训练的针对性、规范性和准确性.因此,设计一种实用、小型、低价、简便的铅球核心训练装置,将有利于推动铅球训练的科学化发展[3].
铅球项目中的投掷器械即铅球的重量是恒定的,成绩以远度为标准,也就是说运动员所受阻抗力量相同,决定投掷远度的重要因素是铅球出手时刻的速度和角度,而铅球出手初速度的80%~85%来自最后用力.因此,激光式铅球核心力量训练装置选取最具代表性的后用力阶段为训练内容.铅球投掷的最后用力是人体将腿、躯干、上臂、前臂及手部,至下而上、至后而前、逐次传递力的一系列关节和肌肉活动有序的协调动作[4],流畅不间断的动作产生力量叠加的效果.根据“动作特征是什么,就练什么” 的原则,装置首先应尽可能模仿专项技术动作,设计的铅球摇臂机构、升降组件和平衡装置共同作用,能够完成最后发力阶段的一系列技术动作.其次,设计应突出科技化、自动化、通用化的特点.处理器可选择AVR系列、PIC系列、430系列芯片,这些芯片在单片机中有广泛应用,运算速度快、处理能力强.同时,高性能的RISC结构CUP、存储器、I/O接口和复位电路,具有省电、高速、体积小和价位低等特点[5-6].信息输出系统采用友好的人机控制界面,利用LED为光源的信息输出屏幕,可随时对训练过程进行查看和评估[7-8];通过以EDA平台设计的数字集成电路,确保训练及量化监控系统的最优化[9-10].
2 激光式铅球核心力量训练装置的技术方案
2.1 技术方案
为了实现铅球运动员核心力量训练的最佳效果,该训练装置主要由铅球摇臂机构、升降组件、平衡训练机构及相应的电路控制系统组成.其中,铅球摇臂机构和升降组件为铅球运动员最后用力阶段的技术动作与肌肉力量相互间的协调练习提供条件,训练中可以通过调整铅球重量来进行不同负荷的投掷,刻度盘记录摇杆的角度,摇臂顶端设置的激光测速仪测试铅球的出手速度,对运动员的发力程度进行准确评估;电路控制系统一方面为信息输出提供电源,另一方面可以控制电动马达,使训练器材产生不同幅度的摇摆来满足训练要求;平衡训练机构主要为运动员的核心稳定性提供了相应训练平台.由此可见,激光式铅球核心力量训练及量化监控装置是集体能、专项动作、稳定性训练与量化监控为一体的整体式、模块化的新型设计结构.
2.2 工作原理
升降组件下端垂直安装在平衡训练机构上,上端通过传动轴与摇臂机构相连.训练过程中,运动员站在平衡训练机构的踏板上,结合经优化设计后,符合铅球专项力量特点的铅球最后用力装置,通过投掷摇臂机构上的铅球进行最后用力练习,从而带动升降装置起升,完成整个机构的一次运转.平衡训练机构上带有信息反馈功能的电路控制系统开始测量平衡机构的摆动幅度,进行信息的量化处理,显示运动员的稳定状态,并据此转换成电信号,与升降装置底部设置的振动器产生互动(随着运动员平衡能力的提高,平衡机构在运动员练习时会越来越平稳,此时平衡机构发出电信号,启动振动器,振动器产生摇摆,以增加练习难度).为了克服不稳定状态和保持正确的用力姿势,运动员必须通过腰、骨盆、髋关节及下肢的协调配合,募集更多的核心区域骨骼肌纤维参与到稳定身体和动作发力,从而高效的完成铅球核心力量训练内容.
3 激光式铅球核心力量训练及量化监控装置的研制
3.1 主要结构
激光式铅球核心力量训练及量化监控装置的研制如图1所示.
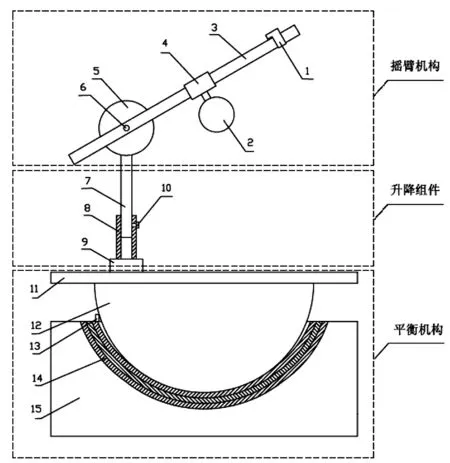
图1 激光式铅球核心力量训练及量化监控装置图1-激光测速仪;2-铅球;3-摇杆;4-滑套;5-刻度盘;6-传动轴;7-升降杆;8-圆柱套筒;9-振动器;10-定位螺栓;11-踏板;12-平衡底座;13-限位机构;14-球面限位板;15-固定底座
摇臂机构包括摇杆、铅球及滑套、转动轴、刻度盘和激光测速仪.刻度盘和滑轨通过转动轴安装在升降组件上端,滑轨可以绕转动轴旋转一定角度(此角度根据运动员身高进行限定),滑套套装在滑轨上,铅球通过连接件与滑套相连,激光测速仪固定安装在滑轨的上端.
升降组件由升降杆、圆柱套筒、定位螺栓和振动器构成.升降杆上端与摇臂机构的转动轴相连,下端插装在套筒内,圆柱套筒竖直设置,为防止升降杆与套筒之间产生滑动,用定位螺栓进行加固,定位端穿过套筒与升降杆的外侧壁接触.套筒下端设有振动器,振动器与带有信息反馈功能的平衡训练机构上的信号输出端连接.升降杆可以根据运动员的身体特征进行高度调整,以适应不同身体条件的运动员的需要.
平衡机构借鉴了“重心平衡测试”的原理,可以模拟铅球投掷过程中的不稳定支撑条件,且带有信心反馈功能.结构包括踏板、平衡底座和限位机构.该测试可以根据不同铅球重量进行难度分级,测量每一次铅球最后用力阶段的平衡机构的摆动幅度.半球形的平衡底座的平面与踏板底面固定连接,保证中心线重合.固定套是圆筒形结构,上面有定位孔,可调支撑柱沿其长度方向设有多个限位通孔,从固定套的上端插入,且每一个限位通孔与固定套上的定位孔相对应,插销同时插入该限位通孔和固定套上的定位孔.
3.2 电路控制系统
铅球核心力量训练及量化监控装置的电路控制系统如图2所示.
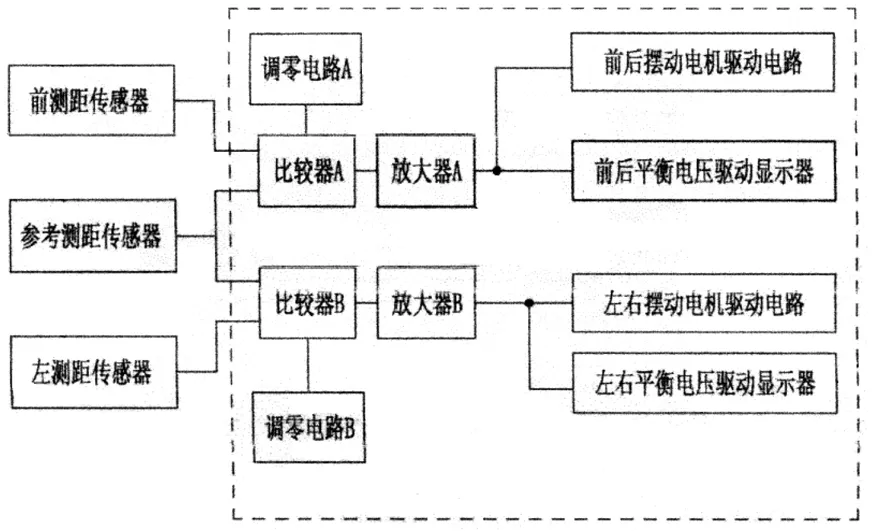
图2 铅球核心力量训练及量化监控装置的电路控制系统
电控系统由调零电路、比较器、放大器、前后摆动电机驱动电路和前后平衡电压驱动显示器构成.平衡机构上的踏板边缘设置的三个测距传感器(参考测距传感器、前测距传感器和左测距传感器)作为电控系统的输入.在平衡训练装置使用前,应使平台处于静止状态,通过调零电路,调整前后、左右平衡电压驱动显示器的起始值,确保输出的准确度;比较器和放大器主要用于对测距传感器的传入信号和中央处理器的输出信号进行放大和稳定处理,确保信息得到有效传输[11];电压驱动显示器根据前端的输入信号,分别显示前后、左右平衡相对应的数值,数值大小取决于输入电压信号;前后、左右摆动电机驱动电路利用A/D转换器,将调理电路输出的模拟信号转化为数字信号,再通过该电路将信号输出,实现平衡状态的控制[12].
4 结束语
该铅球核心力量训练及量化监控装置根据投掷铅球的最后用力阶段的发力特点,将核心稳定力量训练和专项技术训练融合,使运动员保持正确的发力姿势,克服了运动过程中的不稳定状态,使训练强度和训练质量同步提高;该装置可以通过调整铅球重量、升降杆高度、限位机构高度进行不同强度、不同身体条件的运动员进行力量训练;通过激光测试仪和刻度盘测试投掷的速度和角度、对运动员训练时的稳定状态进行量化监控,对各项运动进行定量化,有效的提高整体训练效果.该装置于2013年经国家知识产权局审批,获得了国家专利(专利号201320877965.X).该实用新型价格低廉、实用性强、坚固可靠,具有广泛的推广价值.
