基于多智能体的微燃机发电系统运行控制
2017-12-26何启凡冯东升曹建雄
何启凡, 冯东升, 李 正, 曹建雄
(上海理工大学 光电信息与计算机工程学院, 上海 200093)
基于多智能体的微燃机发电系统运行控制
何启凡, 冯东升, 李 正, 曹建雄
(上海理工大学 光电信息与计算机工程学院, 上海 200093)
孤岛模式下,没有了大电网的电压支撑,系统电压易受负荷干扰而失去稳定,为了维护系统在公共总线处的电压稳定,针对微型燃气轮机并网发电系统的控制模型特点,建立了一种基于多智能体(MAS)技术的两层控制策略。上层是采用最优控制技术设计的协调控制智能体,下层是采用类似同步发电机下垂特性的控制技术设计分散控制智能体,两层之间根据电压安全指标协调配合,共同维护系统电压稳定。仿真结果表明,系统在大的扰动时能够维持系统电压的稳定,验证了该控制策略的有效性和可行性。
电压稳定; 微燃机发电系统; 多智能体; 最优控制技术
0 引言
世界各地电力需求量越来越大,所覆盖地域也变得广阔而复杂,而能源却越发的短缺。在这种大环境下,微电网作为一种能够高效利用多种清洁可持续的分布式电源进行发电的独特方式得到了广泛的研究和发展[1]。以清洁燃料为能源的微型燃气轮机发电系统(MTGS)作为微网内分布式发电(DG)的重要组成部分[2],研究MTGS有效的控制策略,提高微型燃气轮机发电系统在并网和孤岛模式下的动态稳定性,将有助于微电网在不同运行模式下安全稳定的运行[3]。因此,对MTGS运行控制关键技术的研究具有重要的应用价值[4]。
1 微型燃气轮机的控制模型简介
微燃机工作原理简单来说是通过压气机把高压空气压入燃烧室加热,进而输出高温高压气体,进入透平室做功,最后带动与其同轴的发电机旋转[5]。由于微燃机控制系统研究很成熟,其控制结构模式大体相同。本章直接引用目前最常用的Rowen微燃机控制模型,该控制结构由转速、温度、燃料和燃气轮机控制环节构成,各环节控制结构如图1至图5所示。
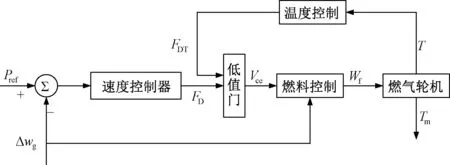
图1 微型燃气轮机控制结构框图
(1)速度控制环节

图2 速度控制环节
(2)温度控制环节
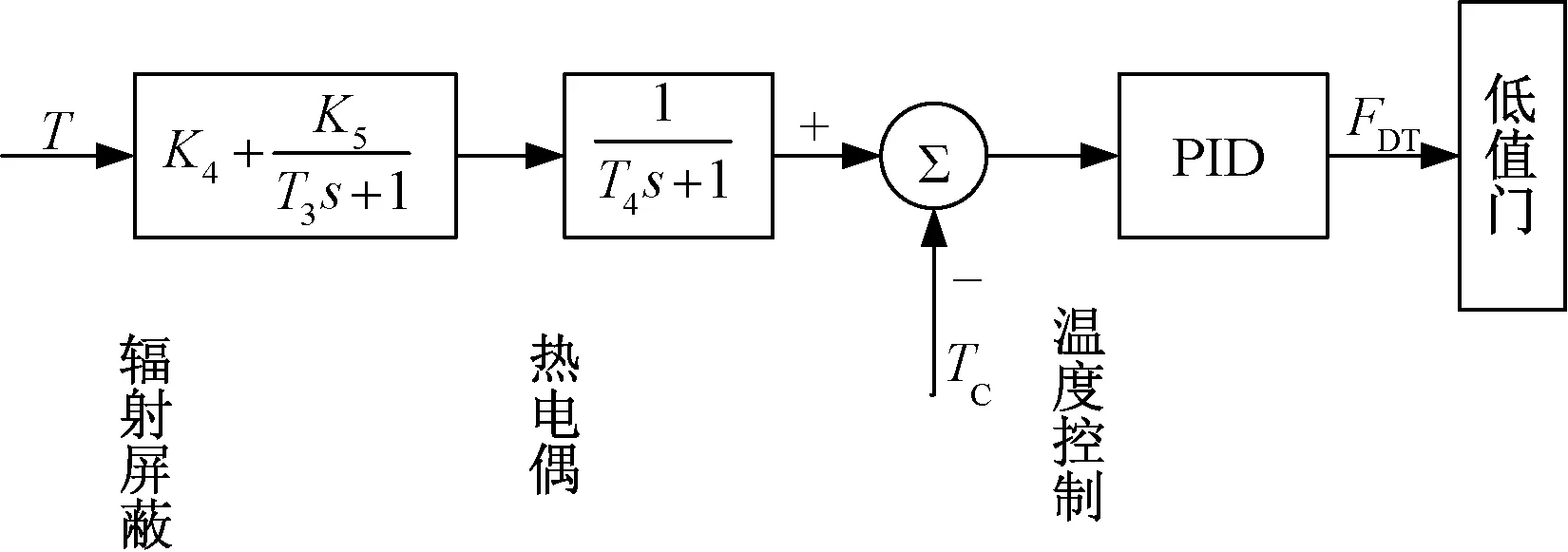
图3 温度控制环节
(3)燃料控制环节

图4 燃料控制环节
(4)燃气轮机环节

图5 燃气轮机环节
(1)
微燃机控制器主要参数:Pref负载给定值,wg发电机的实际转速,wn发电机的额定转速,Δwg发电机转速差,FD、FDT燃料给定值,Wf燃料模块输出信号,T排气温度,TR透平室内额定温度,Tm输出机械转矩,we发电机电磁角速度。
按照上述控制原理图,微型燃气轮机控制原理如下:微燃机控制系统将发电机的转速偏差Δwg=wg-wn作为反馈信号,以负荷参考值Pref作为给定输入信号,以转速恒定作为控制目标,经各控制环节最终将输出的机械转矩Tm作为发电机的输入信号。速度控制器和温度控制器输出的指令信号共同进入低值门模块,将筛选出的最小值作为燃料控制器的输入阀值,最终控制燃料量来调节机械转矩的输出。其中各环节设计到的主要参数见文献[6]。
2 微燃机并网发电系统控制模型
文中永磁同步发电机、变流器、整流逆变电路、无功补偿技术和有源滤波技术采用常用数学模型,在此就不一一叙述。把微型燃气轮机和同步发电机同轴相连,并通过电力电子变流器接口与电网相连,即可实现并网运行下微型燃气轮机发电系统的仿真,其全系统控制模型如图6所示。
针对燃机发电系统的并网控制策略,换流器均采用SVPWM算法的双闭环控制,其中,整流器采用外环电压、内环电流的控制,实现直流母线电压稳定,网侧逆变装置采用了外环功率、内环电流的控制,实现恒功率并网,并通过SSRF-SPLL锁相算法来获取电网电压的相角支撑。

图6 微型燃气轮机并网系统模型
3 基于MAS的孤岛控制框架
多智能体系统(Multi-Agent System, MAS)是信息技术高速发展的产物,是人工智能系统的重要分支之一,该技术被视作为大范围的人工智能。它有多层能量智能体(Agent)组成,通过多层的Agent信息交互和协调控制实现多目标的优化问题并能很好地解决复杂系统的通信问题[7]。对于微网,其含有多种不同类型的分布式能源作为发电装置,因此,将多智能体技术应用到微电网中[8],以使这些分布式能源通过智能体系相互联系。当微网系统独立运行时,基于多智能体强大的分析能力和通讯能力,微网便能够自主地进行决策分析,来协调微网内各种分布式能源的运行,增强了适应复杂环境的能力,极大地提高了对本地负载供电可靠性的水平。基于MAS的分散协调控制策略如图7所示。

图7 基于MAS的分散协调控制策略
下层分散控制智能体所包含的单元智能体通常由分布式发电Agent(DGs Agent,DA)、储能Agent以及负荷Agent组成。该分散控制Agent层具体由反应层以及协商层构成。在反应层中可以通过传感器模块和情形识别模块获取外部环境信息,又可以通过动作模块改善外部环境的变化对系统带来的影响。其中协商层是分散控制智能体层的核心层,根据系统所处的干扰状态提出分散控制策略,执行分散控制,使分散控制Agent中各DG向系统公共母线提供相应的电压,以支持负荷在稳定的电压环境下正常运行。
MAS的上层是协调控制Agent(Coordinated Control Agent, CCA)层,是整个系统的大脑,对分散控制Agent层起直接领导作用。下层反应层经过通信模块收集外部信息传给CCA层中电压平稳判决模块,进而计算出电压安全指标,协调控制判决模块将根据该指标发出相应的信号给动作实施模块,执行模态切换与否的命令,继而确定协调控制策略是否执行。
由于单个智能体在能量提供上有限或掌握的信息不完整,所以要想最终实现总线电压的稳定,各智能体单元间在信息、能量和资源上的互相支持将必不可少[9]。下图8给出了MAS两层智能体之间的交互过程,上层协调控制智能体通过直接作用的形式与下层智各单元能体进行信息交互,而下层各单元智能体是基于环境和系统变化间接实现对CCA的信息交互。
3.1 双环分散控制器设计
如图9,微网通过公共母线耦合点PCC与大电网相连。当PCC断开后,微网便进入孤岛运行状态,此时,内部的DGs需要共同向负荷提供需求的功率以维护系统公共总线电压的稳定。由于内部各DG都是通过逆变器接入公共母线的,所以分散控制器的设计实际是逆变装置控制器的设计。
如图10所示,MAS下层单元智能体中的分散控制是采用双环控制方法:外环是以发电机下垂特性为依据的功率控制[10],内环引入电压电流解耦控制。

图8 两层之间的信息交互

图9 基于MAS的微网拓扑框图

图10 分散控制拓扑框图
3.2 协调控制器设计
3.2.1 电压平稳判据
在对上层CCA分析中,电压平稳判据是决定协调控制技术是否被采用的唯一判别方法,本文提出一种适合于电压稳定性评估的电压安全指标。该电压安全指标适应于微型燃机发电系统或微网系统中。

进而求出该节点第j时刻的瞬时电压平均值,如式(2):
(2)
接着计算出该节点第j时刻的电压偏差百分比,如式(3):
(3)

则第i个节点在j时刻的电压稳定指标见下式(4):
(4)
最终,得出第j时刻的电压平稳判据安全指标:
(5)
式中:Uth为接近于1的正数,可根据系统电压稳的情况作细微的调节。
根据电压平稳判据安全指标决定是否启动协调控制器的具体方法如下:
3.2.2 协调控制器设计
通过结合线性最优控制理论对微网协调控制器进行设计,为方便描述,本文对两台微型燃机发电系统(MTGS)构成的微电网进行协调控制器的设计。但研究表明该控制策略可适用于多台DG存在的微网中。图11给出了两台MTGS构成的单一线路,根据KVL和KCL电路原理,得出系统动态方程[11]。
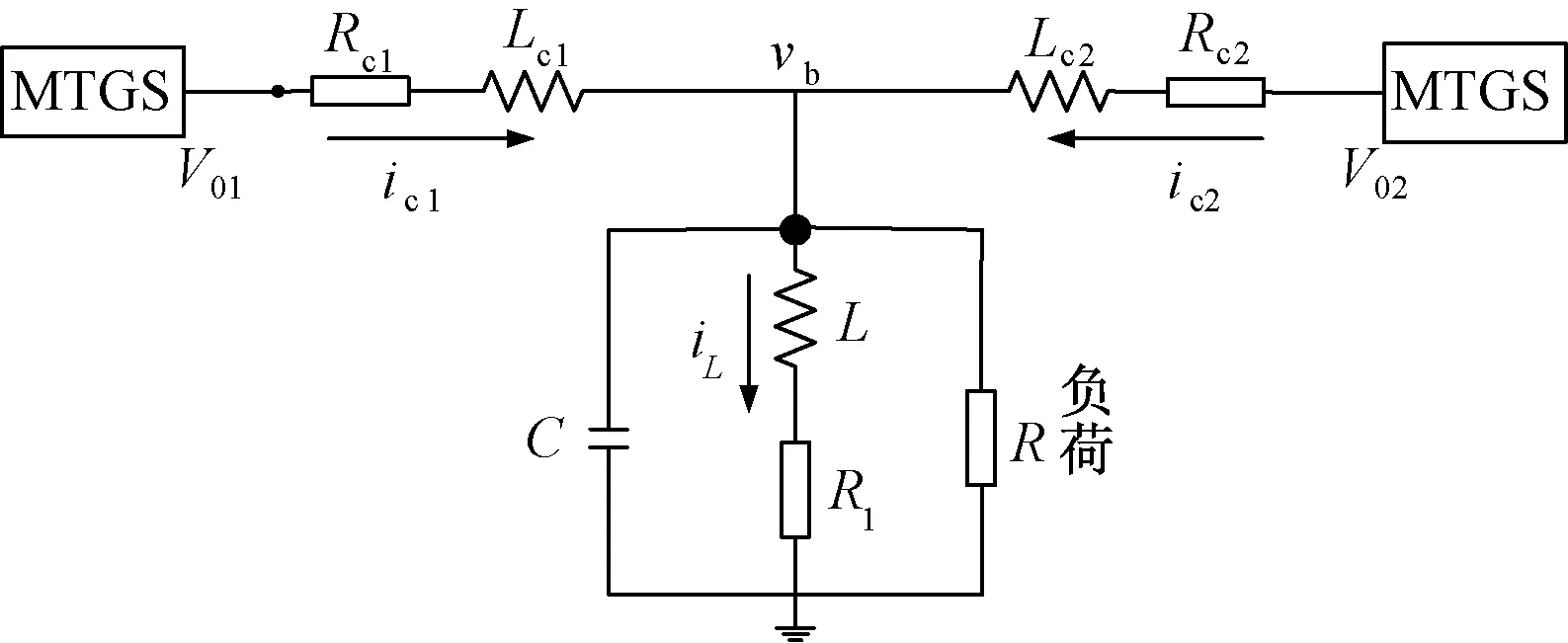
图11 两机微网线路
(6)
对应的状态空间模型可表示为:
(7)
式中:ui(t)为输入变量;xi(t)为状态变量;zi(t)为输出变量,设计状态反馈控制器:
ui(t)=Kxi(t)
(8)
式中:K为状态反馈增益矩阵。将上式带入式(7),状态闭环系统方程为:

(9)
则构成整个状态反馈系统结构如图12。

图12 状态反馈系统结构图
(10)
下面介绍状态反馈增益矩阵K的求取,根据线性定常系统,确定最优控制ui(t)=Kxi(t),目标是使性能指标J最小。

(11)
式中:Q为半正定对称常数权重矩阵;R为正定对称常数权重矩阵。为此,建立哈密尔顿函数:
(12)
并令其导数为

ui(t)=R-1BTλt
(13)
令
λt=M(t)xi(t)
(14)
而M(t)是微分方程式(15)的解:
(15)
由于tf→∞式子(15)等于零,所以:
MA+ATM-MBR-1BMT+Q=0
(16)
由式(8)、式(13)和式(14)可知状态反馈增益矩阵:
K=R-1BM
(17)
由于M(t)可以由式(16)得出,所以:
K=f(A、B、Q、R)
(18)
上式中可知,权重矩阵Q、R是求取K的关键,由最优控制原理可知,在式(11)中,R越小,对控制量ui(t)的限制越低,因此取
Q=qQ0,R=I,Q0=I
(19)
式中:参数q根据系统系统的性能要求适当选取。
综上所述,状态反馈控制器的设计如下:

4 基于MAS的孤岛系统仿真
根据文中给出的模型和控制策略,在MATLAB软件平台上搭建微型燃气轮机发电系统的仿真。发电机额定转速为60 000 r/min,系统容量为 30 kW,开关频率10 kHz,并网运行下的系统主要仿真参数见表1。

表1 并网运行下系统仿真主要参数
基于MAS的分散协调控制,目的是系统在孤岛运行模式下,实现多台DG共同对负荷的可靠性供电,即在负荷大扰动情况下,也能通过该控制策略来控制公共总线处的电压稳定,解决系统电网动态稳定性问题。该微网的控制结构由上层协调控制智能体(CCA)和下层两个分散MTGSAgent组成,通过CCA层中的电压平稳判据模块实时测量系统电压,相应的控制命令则由上层CCA和下层分散控制Agent根据电压安全指标给出。仿真参数设计如表2所示,其中,MTGS的额定输出为380 V,微网系统中原始负荷为2 350 W、230 Var。两台MTGS以1∶1比例分配系统功率。为了验证分散协调控制策略的有效性,在突加90%负荷的情况下,验证单台MTGS输出的有功功率、无功功率、电流和电压的变化情况。

表2 孤岛运行下系统仿真参数
微电网系统中原始负荷为2 350 W、230 Var,起初稳定运行时,由于两台MTGS平均分配系统功率,则单台MTGS输出功率为1 175 W、115 Var,额定电压稳定在380 V。在t=0.2 s时突然增加90%的负荷,即新增加有功功率2 115 W,无功功率为207 Var,则瞬间会出现系统电压失压情况。此时,上层CCA中电压平稳判据模块中的电压安全指标检测出电压超出安全阀值,协调控制器被启动,与下层分散控制器同时维护系统电压的稳定。在出现短暂的波动后,根据下垂特性曲线,电压有所降低但最终稳定在379.98 V附近,基本接近额定电压,图略;由图13、图14看出,单台MTGS的输出功率最终稳定在2 232.5 W、218.5 Var。

图13 MTGS1输出有功功率变化波形

图14 MTGS1输出无功功率变化波形
在基于上述仿真,即0.2 s突加90%负荷的仿真中,分别进行分散控制策略下的仿真以及基于MAS的分散协调控制下的仿真。仿真结果如图15-16,可以看到由于在0.2 s前,没有大的扰动,采用分散控制器可以实现电压的稳定以及有功功率和无功功率的平稳输出。而在0.2s突加扰动,采用基于MAS的分散协调控制策略,会立即启动协调控制器,其与分散控制器同时维护系统的稳定,所以表现出了很好的动态稳定性。而只采取分散控制策略下的仿真波形,其表现出了很差动态稳定性。
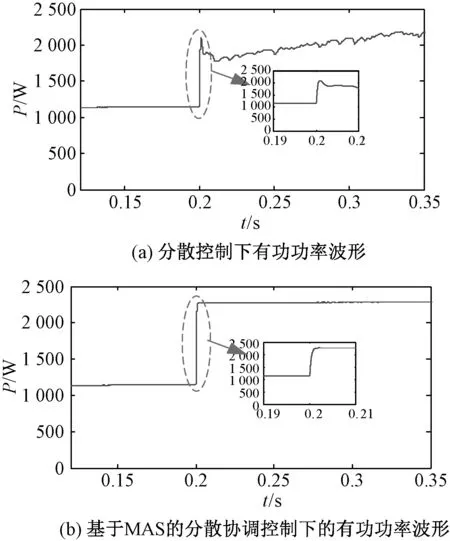
图15 MTGS1输出有功功率变化对比波形

图16 MTGS1输出无功功率变化对比波形
5 结论
本文建立的基于MAS的两层控制策略,通过协调控制层的电压平稳判决模块决定是否启动协调控制器,从而与分散控制器共同维护系统电压稳定。此外,通过结合最优控制理论技术设计协调控制器,以进一步保证系统的渐近稳定性,大大提高了系统在大扰动的情况下的动态稳定性。仿真结果表明,本文提出的基于多智能体的分散协调控制策略的有效性,在突加或突减负荷的情况下,系统仍能快速保持稳定。
[1]马钊,梁惠施. 2014年国际大电网会议学术动态系列报道配电系统和分布式发电技术[J]. 电力系统自动化,2015(3):1-5.
[2]周念成, 邓浩, 王强钢,等. 光伏与微型燃气轮机混合微网能量管理研究[J]. 电工技术学报, 2012, 27(1):74-84.
[3]李涵,王毅,张丽荣,等. 孤岛模式下的微电网频率的协调控制研究[J]. 电力科学与工程, 2012, 28(12):56-62.
[4]杨秀, 郭贤, 臧海洋,等. 微型燃气轮机发电系统孤岛及并网运行的建模与控制策略[J]. 电工技术学报, 2012, 27(1):63-68.
[5]章素华. 燃气轮机发电机组控制系统[M]. 北京:中国电力出版社, 2013.
[6]张化光,邓玮,耿加民. 发电用燃气轮机的非线性数学建模及稳定性分析 [J]中国电机工程学报, 2007, 27(26): 108-114.
[7]郭佳欢,谢清华,黄伟. 基于MAS的微电网即插即用理论研究[J].电网与清洁能源,2010,26(1):31-35.
[8]窦春霞,李娜,徐晓龙.基于多智能体系统的微电网分散协调控制策略[J].电工技术报,2015,30(7):125-134.
[9]赵添羽.基于Multi-agent-system微电网多模态协调切换控制研究[D].秦皇岛:燕山大学,2015.
[10]朱桃兰. 低压微网运行控制的下垂控制器研究与设计[D].成都:西南交通大学,2014.
[11]李清.电网电压不平衡且谐波条件下双馈风电系统运行与控制研究[D]. 重庆:重庆大学, 2014.
[12]刘蕾, 张国山. 基于动态补偿的线性系统最优干扰抑制[J]. 控制理论与应用, 2013, 30(7):808-814.
Control of Micro Turbine Generator System Based on Multi-Agent)
HE Qifan, FENG Dongsheng, LI Zheng, CAO Jianxiong
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology, Shanghai 200082, China
The system voltage will lose stability without the bulk power system voltage support under the islanding. In order to maintain the system public bus voltage stability, according to the features of the control model for micro turbine grid connected power generation system, this paper establishes a two-layer control strategy based on multi-agent (MAS) technology. The upper layer is the coordination control agent with the optimal control theory, while the lower one is a decentralized control agent with a control method of the similar synchronous generator droop characteristic; and the two layers are coordinated according to the indexes of the voltage security, and take on the responsibility jointly for maintaining the system voltage stability. Simulation results show that the stability of the system voltage can been maintained when the system is disturbed severely, and that the control technology is reliable and effective.
voltage stability; micro turbine power generation system; multi-agent system; optimal control theory
2017-06-19。
10.3969/j.ISSN.1672-0792.2017.11.007
TM76
A
1672-0792(2017)11-0036-07

何启凡(1992-),男,硕士研究生,研究方向为电机、电力系统分析。
