基于改进维纳滤波的运动模糊仪表图像恢复算法*
2017-12-20肖震宇于舒春刘爽于晓洋
肖震宇,于舒春,刘爽,于晓洋
(哈尔滨理工大学测控技术与通信工程学院,哈尔滨150080)
0 引 言
运动模糊图像的恢复技术,是数字图像处理领域的重要分支[1]。在仪表图像的拍摄过程中,经常会因为各种原因造成图像模糊,从而影响智能识别的准确率。
从运动模糊图像的形成机理上看,主要是在成像过程的曝光时间内物体和相机之间存在相对运动。这种相对运动的产生又分成两种情况,一是相机静止而被拍摄物体发生运动,二是被拍摄物体静止而相机发生运动[2]。
对于运动模糊图像的恢复,一般分为两个环节,第一个环节是估计运动模糊方向等参数,第二个环节是根据估计出来的模糊参数采用恢复算法复原出清晰的原始图像。在运动模糊方向检测环节中,Hough变换和radon变换是两类常用的方法。基于Hough变换的模糊方向检测,实质上是将图像空间上的各点执行累加统计,进而根据累加峰值来判断模糊方向。如果图像像素点过少,Hough变换模糊方向检测就会出现较大误差甚至无法完成检测[3]。基于radon变换的模糊方向检测,将图像各点沿某一方向作投影再执行统计以判断模糊方向。Radon变换模糊方向检测,在图像特征对比度不够明显时会出现较大误差[4]。
运动模糊图像的恢复,是根据估计出来的模糊参数构造模糊图像的退化函数(点扩散函数),进而对模糊图像执行卷积处理。从这一思想出发,基于二维卷积操作的逆滤波法在最初的模糊图像恢复中获得了广泛的应用。但逆滤波法对噪声非常敏感,并且在点扩散函数很小时会出现误解的情况[5]。相比于逆滤波法,维纳滤波具有更强的噪声抑制能力。维纳滤波的执行思路是,寻找一个最优滤波器使原始图像和运动模糊图像的复原图像均方误差最小[6]。但维纳滤波也存在一定局限性,一是关键参数的设置依靠人的经验,二是复原结果中存在振铃效应[7-10]。
基于上述分析,本文将构建更为合理的运动模糊参数估计方法,并对维纳滤波方法进行改进,以增强运动模糊仪表图像恢复技术的实用性。
1 自适应模糊方向估计
首先来分析一下,如何基于Hough变换对运动模糊图像的模糊方向进行检测。一幅数字图像可以看作一个二维平面,图像中每一个像素的横纵座标可以用和来表示。一幅图像沿某一个方向运动形成模糊效果后,会留下这个方向上的模糊条纹。因此,如果能检测到模糊条纹的直线特征,也就可以确定模糊方向。
基于Hough变换实现模糊方向检测的思路是,先将各个图像从X-Y空间转换到极坐标空间来表达,如式(1)所示。

式中ρ表示极径,α表示极角。
X-Y空间中的直线,经过Hough变换转换到极坐标空间后,直线上各点的ρ不相同、α是相同的,这样极坐标中一条直线上各点就会出现同一角度的极径累加。反过来讲,极坐标中某一角度下的极径累加值越大,证明对应X-Y空间中对应角度上存在直线特征的可能性就越大。
但是,如果某一角度极径累加值较小,并不一定不存在直线特征,可能是这个方向上的像素过少。因此,本文用事先设定的阈值来判断,如式(2)所示。

接下来,执行Radon变换检测模糊角度,如式(4)所示。

2 改进维纳滤波模糊复原
确定了模糊方向等模糊参数后,就可以采用恢复算法来去除运动形成的模糊,复原原始图像了。在去模糊环节中,逆滤波算法和维纳滤波算法都是比较常用的。其中,维纳滤波不仅可以去除模糊,对于一些噪声污染较为严重的模糊图像仍然有不错的恢复效果。
维纳滤波的基本思想是求取原始图像的误差估计,如式(5)所示。

由式(5),维纳滤波最终在频率域上的实现,如公式(6)所示。

维纳滤波不仅可以实现运动模糊图像的恢复,还具有较强的抗噪能力。但是,在维纳滤波也存在一定的局限性,一是式(6)中的K需要人为设定,不仅依靠人的经验,也影响了去模糊算法的执行效率;二是维纳滤波在去模糊的过程中,会出现振铃效应。为此,本文对传统的维纳滤波去模糊方法进行改进,一是实现K的自动设定,二是对振铃效应进行抑制。
2.1 K的自动设定

据此,为了实现κ的自动设定,本文设计了三个步骤:
(3)根据第二步的结果和式(7),计算κ。至此,我们实现了对κ的自动设定。
2.2 振铃效应抑制
运动模糊图像中模糊的形成,在某个像素点上体现为周围邻域点灰度和该点灰度的叠加效果。在图像的边缘位置处,因为其邻域信息不完整并不完全符合这一规律。但是在模糊恢复的过程中,边缘处像素的处理和其它位置处的处理是一样的,就导致了边缘处出现误差。
为了抑制振铃效应,我们对边缘处像素执行去模糊处理时,邻域位置根据距离中心位置的远近施加不同的权重。这种权重配置,根据边缘像素所在位置的差异,分为以下8种不同的情况,如图1所示。
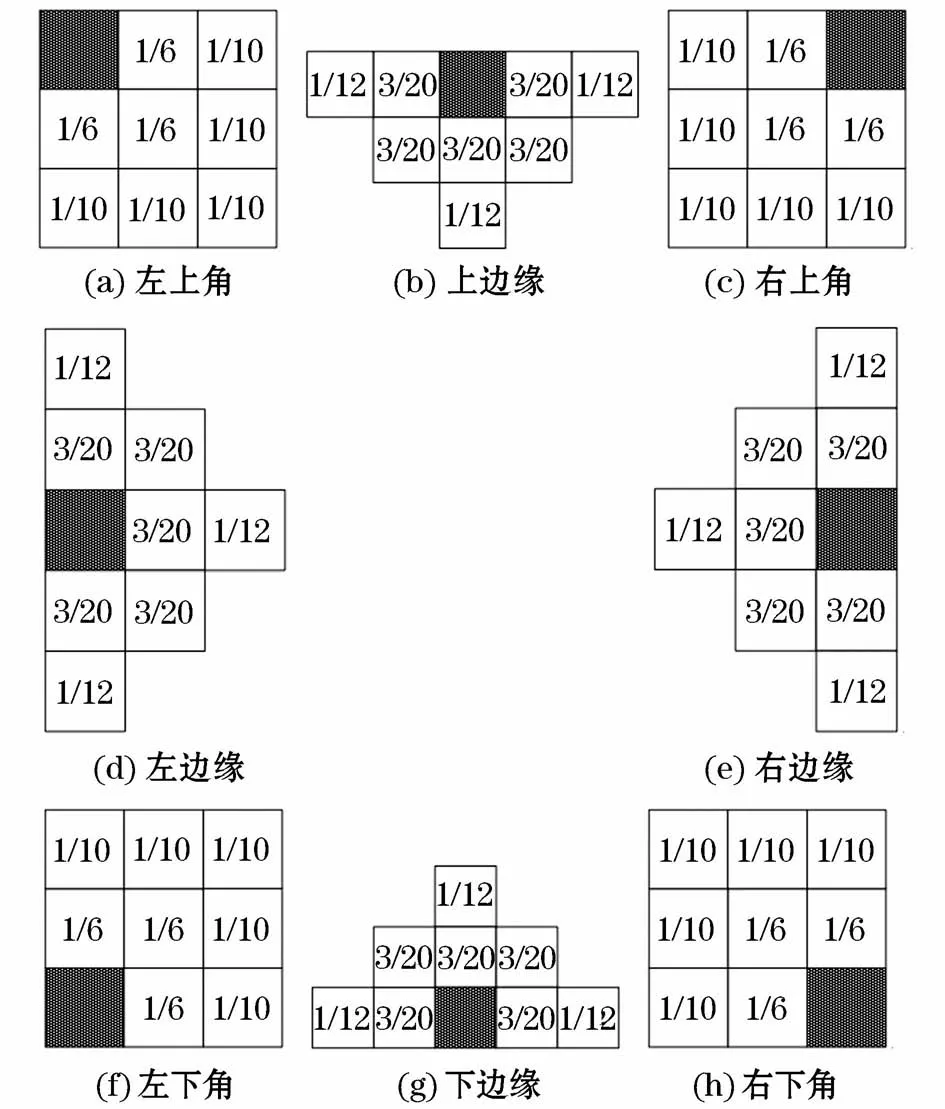
图1 边缘像素的权重模板Fig.1 Weightmodel of edge pixel
3 实验结果
为了验证本文提出的运动模糊图像恢复算法的有效性,展开如下的实验研究。实验中的计算机硬件配置为,酷睿双核主频2.0 GHz的CPU、大小为8GB的内存;计算机的软件配置为,windows 7系统,Matlab 11.0程序设计语言。
实验所用图像为一幅数字仪表图像。首先,对此图像施加一定角度的运动模糊,进而采用本文第2节提出的自适应模糊方向估计方法估计模糊角度,再执行改进维纳滤波方法完成去模糊处理。实验结果如图2所示。
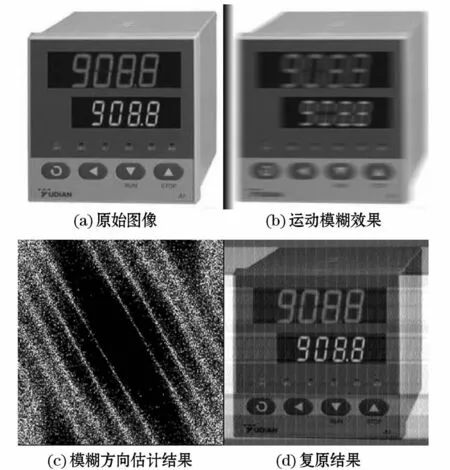
图2 实验结果Fig.2 Experimental results
如图2(a)所示,是数字仪表的原始图像;如图2(b)所示,是数字仪表图像的运动模糊效果。针对图2(b),我们施加自适应模糊方向估计方法估计模糊角度,视觉效果如图2(c)所示,模糊角度检测为118°。据此,进一步施加改进维纳滤波方法,复原结果如图2(d)所示。从图2(d)中的结果可以看出,数字仪表图像被有效的复原出来,并且在边缘处获得了和中心区域一样的复原效果,有效地避免了振铃效应。
4 结束语
针对运动模糊仪表图像的复原问题,本文从两个角度开展了研究工作。首先,对模糊方向估计方法进行了研究,提出了一种自适应模糊角度估计方法,此方法先执行Hough变换检测模糊角度,并判断极径累加值是否足够,如不足够则再用Radon变换完成模糊角度检测;其次,对模糊复原方法展开了研究,在维纳滤波复原方法的基础上,提出了两点改进措施,实现的自动设定,并对振铃效应进行抑制。实验结果表明,本文方法有效地检测到了运动模糊的角度,并获得了理想的图像复原结果。
