基于自适应多行为模式鱼群算法的电能计量设备运维作业优化研究*
2017-12-20张思建唐若笠张捷方彦军
张思建,唐若笠,张捷,方彦军
(1.广东电网有限责任公司电力科学研究院,广州510080;2.武汉大学 自动化系,武汉430072)
0 引 言
随着网络化、信息化技术在电力行业的深入推广,传统的电能计量设备运维作业模式早已无法满足当今的管理需求。在电网企业日常管理工作中,传统的电能计量设备运行维护作业模式存在路径规划不科学,作业过程耗时长、能耗高,难以实时掌握和调整运维作业进度等问题,严重影响日常运维效率。可以,有必要研究合理、高效的运维作业优化方案,在充分考虑时间、路程、能耗、效率等要素的前提下,通过建立运维作业路径优化模型,研究相应优化算法,进而科学规划作业路径,降低设备运维成本,提高运维效率[1]。
基于上述分析,本文拟研究基于智能算法的电能计量设备运维作业优化策略。具体地讲,首先结合电网企业实际需求,建立电能计量设备运维作业优化数学模型;其次,研究并提出一种新的自适应多行为模式鱼群算法(Adaptive Multi-Behavior Fish Swarm Algorithm,AMB-FSA),以提升传统智能算法在求解具有离散、多局部极值等特性的复杂问题时的性能,并通过具体的测试函数验证MB-FSA算法的有效性;最后,采用所提出的MB-FSA算法对电能计量设备运维作业优化的实际问题进行求解。
1 电能计量设备运维作业优化模型
根据电网企业关于电能计量设备运维作业相关规范,每日需对一定数量且分布于不同位置的计量设备开展运维作业。传统的作业模式采用基于经验的方式人工分配作业任务并确定行进路线,这一传统方式早已无法满足电网企业低碳、高效的管理要求。
随着网络化、信息化技术应用的不断深入,为提高工作效率,要求电能计量设备运维作业能够在综合考虑时间、路程、能耗的前提下,实现各作业人员巡检路径科学规划。具体地讲,应根据每日需要运维任务点的数量以及出勤作业人员的数量和属性,科学地为每一位作业人员指派任务;此外,应综合考虑路程、路况等要素,科学规划各作业人员的行走路线,进而保证以最短的时间和能耗完成全部运维任务。
基于上述分析,考虑若将所有作业人员行进路线对应的路程与实时路况加权求和后,作为评价运维路径规划方案的目标函数。假设每日需要运维的任务点数量为M,建任务列表如式(1)所示:

其中,xi表示任务点编号。可见,任务列表x为1至M的一个排列,运维作业优化的目标也是需要找到一个最优排列,使其对应的目标函数值最小。假设当日有N个作业人员出勤,可根据各出勤人员业务能力的不同为其科学安排任务量,各作业人员对应的任务量记为 pi(i=1,2,…,N)。可见,各作业人员的任务列表依次从式(1)中截取对应部分即可,且长度依次为 pi(i=1,2,…,N)。考虑到在实际工作中,所有作业任务须统一从运维中心出发,且完成所有任务后须全员返回运维中心,各作业人员的实际行进路线如图1所示。
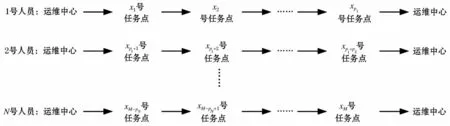
图1 作业人员行进路线Fig.1 Route of the operating workers

基于图1所示的各作业人员行进路线,考虑到实时路况的要素,通过将路况信息转化为相应的路况系数,并乘于对应路径的路程长度,最为该路径优劣的衡量标准。对于式(1)所示的每一种路径规划方案,以路况系数为权重将所有作业人员行走路径的路程长度加权求和,进而得到的适应度函数如式(2)所示。式中s0i1表示第i个作业人员从运维中心至其第一个任务点的路程;ρ0i1表示该路径对应的路况系数;s0ip表示第i个作业人员从其最后一个任务点回到运维中心的路程;ρ0ip表示该路径对应的路况系数;与分别表示第i个作业人员从其第j个任务点至第j+1个任务点的路程与路况系数;pi表示第i个作业人员分配所得的任务量。实时路况系数如表1所示。

表1 实时路况系数Tab.1 Coefficient to the real time traffic
2 多行为模式的人工鱼群算法
2.1 基本人工鱼群算法
AFSA采用追尾、聚群和觅食三种行为模式来描述鱼群的搜索过程。人工鱼个体在解空间中所处的位置即优化变量被定义为X=(X1+X2,…,Xn)。适应度函数值f(X)被描述为人工鱼所处位置X对应的食物浓度。dij=‖Xi-Xj‖表示两条人工鱼所处位置Xi和Xj之间的距离。Visual和Step为AFSA为每一人工鱼个体引入的参数,分别表示人工鱼的视野范围和最大移动步长。δ表示拥挤度因子。AFSA的三种行为模式依次被定义为:
(1)追尾行为:寻找视野范围内最优人工鱼个体位置Xbest,如果其周围不过分拥挤,则向其方向移动一步;否则执行觅食行为;
(2)聚群行为:寻找视野范围内所有人工鱼个体的中心位置XC,如果其周围不过分拥挤,则向其方向移动一步;否则执行觅食行为;
(3)觅食行为:在视野范围内随机选取另一个位置Xj,如果其食物浓度优于当前位置,则向Xj移动一步,否则重新进行选取和判断。若反复寻找Trynumber次后仍没有找到符合移动条件的位置,则停止寻找,在视野范围内随机跳动一步。
每条人工鱼在移动前首先计算“追尾或觅食”以及“聚群或觅食”两种组合行为模式得到的下一位置的适应度函数值,并在这二者之间选取较优的一种组合行为模式执行。算法中模拟一个“公告板”,用于记录每次迭代得到的最优人工鱼的位置及其对应的适应度函数值,当预设的迭代次数完成后,公告板上的记录便是鱼群算法寻优所得到的结果。
2.2 自适应多行为模式的人工鱼群算法
AFSA算法对于多局部极值问题的求解具有显著优势,适用于求解诸如电能计量设备运维作业优化一类的路径优化问题。段其昌等人[3]采用粒子群算法的若干特性对AFSA算法进行改进,并提出了粒子群优化鱼群算法PSO-FSA。尽管PSO-FSA算法的优化精度较AFSA一定程度上得到提升,但由于每一代需要调用适应度函数的次数增加,其算法复杂度也显著上升。由其对于本文所描述的运维作业优化,其适应度函数的每一次调用都需要经过“解码---计算---编码”的过程,算法主要耗时在于适应度函数的调用,故若采用PSO-FSA算法求解该问题,算法耗时必将显著增加。针对这一问题,本文提出一种自适应多行为模式的人工鱼群算法(Adaptive Multi-Behavior Fish Swarm Algorithm,AMB-FSA):首先,为 AFSA引入“记忆与觅食”以及“交流与觅食”两种新的组合行为模式;此外,提出一种自适应的动态行为模式选择机制,实现对算法对于多种组合行为模式的自适应选择,以在不显著增加算法复杂度的前提下进一步提升算法性能。
具体地讲,“记忆或觅食”行为是指寻找人工鱼个体自身记忆中的最优位置Xpbest,若其周围不过分拥挤,则向其方向移动一步,否则执行觅食行为;“交流或觅食”行为是指寻找整个鱼群的当前最优个体位置Xgbest,若其周围不过分拥挤,则向其方向移动一步,否则执行觅食行为。综上所述,AMB-FSA算法共包含如下4中组合行为模式:追尾或觅食、聚群或觅食、记忆或觅食、交流或觅食。不同于AFSA算法中依次计算比较各行为模式并择优选取,AMB-FSA算法采用自适应的方式进行,即算法迭代开始时随机选择一种行为模式,若该代通过选取的行为模式更新了公告板记录,则下一代继续采用该行为模式,否则重新随机选取。综上所述,AMB-FSA算法流程如下所示:
(1)初始化鱼群的位置和速度,每条鱼记忆中的最优位置,公告板记录的鱼群最优位置等参数;
研究发现,实验组患者治疗有效率为96.67%,对照组患者治疗有效率为76.67%,实验组患者治疗有效率明显高于对照组,P<0.05表示统计学有意义。实验组患者的FVC、FEV、PEF水平明显优于对照组,P<0.05表示统计学有意义。
(2)从4种组合行为模式(聚群或觅食、追尾或觅食、记忆或觅食、交流或觅食)中随机选取一种;
(3)采用选取的组合行为模式更新所有人工鱼个体位置;
(4)比较并更新公告板记录。若公告板被更新,则进入步骤(5),否则重新随机选取一种组合行为模式后进入步骤(5);
(5)是否达到终止条件,若是则返回最优解,若否则继续执行步骤(3)。
2.3 算法仿真分析
为验证AMB-FSA的算法性能,选取表2所示的标准测试函数进行仿真实验,并与PSO-FSA算法进行对比。仿真环境为 Matlab/R2007b,PSO-FSA与AMB-FSA算法的相关参数均按文献[3]进行设置,目标函数均设置为50维,算法对每一测试函数都独立运行50次,前1 000次迭代中各组合行为模式更新公告板记录的平均次数如图2~图5所示。
由图2至图5可以看出,在自适应选择机制下,4种组合行为模式对于更新公告板记录的贡献率相当,但由于每一代仅需计算一种行为模式,即每一人工鱼个体的一次迭代仅需一次适应度函数的调用,故算法耗时较PSO-FSA算法而言优势显著。进一步地,将算法终止条件设置为目标函数的调用达到最大次数(Max_FES)1*105,其余参数设置不变,PSO-FSA与AMB-FSA算法对于表2所列的各测试函数50次独立运行的平均优化结果如表3所示。可见,基于自适应多行为模式的AMB-FSA算法对于各测试函数的优化精度均显著高于PSO-FSA算法。
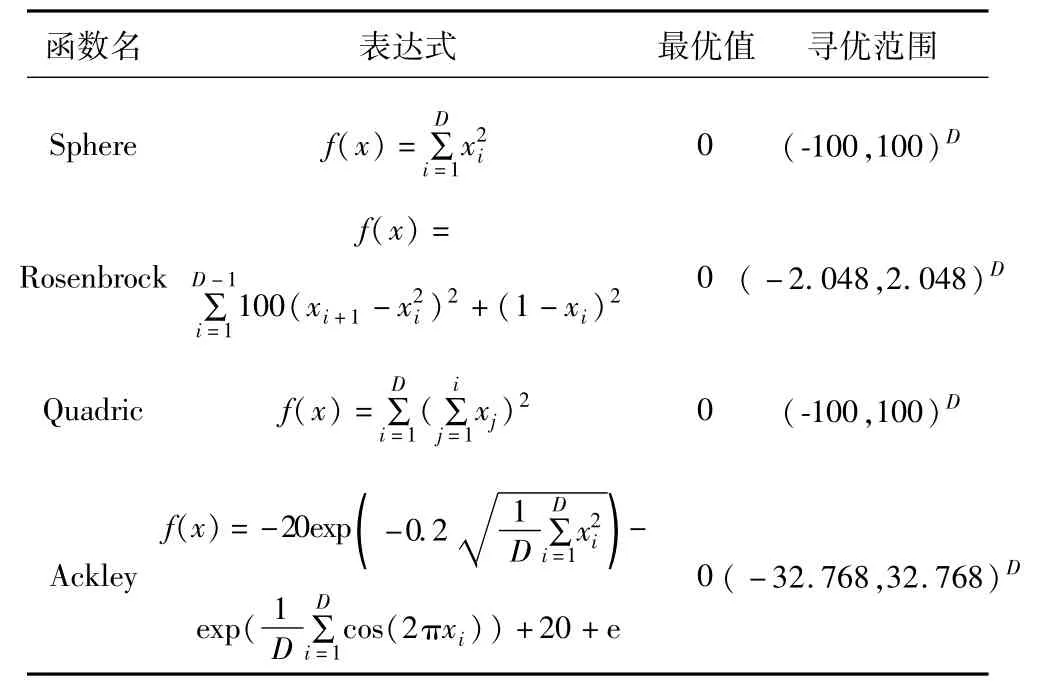
表2 标准测试函数Tab.2 Benchmark test functions
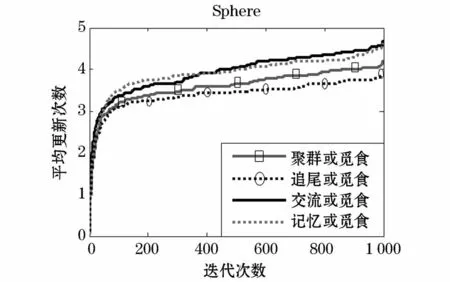
图2 Sphere函数公告板更新曲线Fig.2 Board updating curve of Sphere
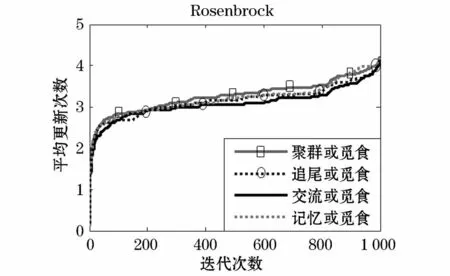
图3 Rosenbrock函数公告板更新曲线Fig.3 Board updating curve of Rosenbrock

图4 Quadric函数公告板更新曲线Fig.4 Board updating curve of Quadric

图5 Ackley函数公告板更新曲线Fig.5 Board updating curve of Ackley

表3 仿真实验结果对比Tab.3 Comparison of the experimental simulation results
3 基于AMB-FSA的电能计量设备运维作业优化
3.1 算法编解码
考虑到AMB-FSA算法采用连续数值进行运算,而本文所建立的电能计量设备运维作业优化模型采用离散编码,故模型与算法之间需要进行合理的数据转换。本文采用对人工鱼个体各维度值进行大小排序,并用序列号替代原连续数值的方式实现这一转化。具体地讲,将算法优化范围设为[0,1],在计算AMB-FSA算法中每一人工鱼个体的适应度函数值前,首先对其各维度值按照从小到大的顺序进行排列,将每一维度的数值转化为相应的序号后,再采用式(2)计算其适应度函数值。
3.2 数值仿真实验
以运维任务点数量M=15,当日出勤作业人员数量N=3为例进行数值仿真实验。首先,随机初始化运维中心以及各任务点的位置坐标(如表4所示),计算两两之间的路程,并随机初始化各路径的路况信息。以式(2)作为目标函数,采用AMB-FSA算法进行优化,种群规模设置为50,算法终止条件设置为目标函数的最大调用次数达到5*105次。采用穷举法(所需运算次数为 A1515=15!≈1.3×1012次)计算得到全局最优适应度函数值为2.77*102,基于AMBFSA算法的优化结果如表5所示。可见,AMB-FSA算法能够以合理的适应度函数调用次数准确求得全局最优解,也验证了本文所提出的电能计量设备运维作业数学模型及基于AMB-FSA的求解算法的有效性。
基于AMB-FSA算法给出的全局最优解,经解码操作后可得到各运维人员的任务列表及行走路线,如图6所示。

表4 运维中心及各任务点坐标Tab.4 Location of the operating and maintaining center and each working point
表5 运维作业优化实验结果Tab.5 Experimental results of operating and maintain optimization
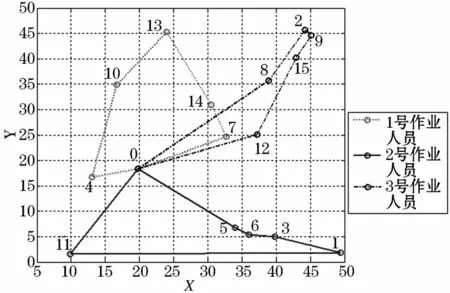
图6 基于AMB-FSA算法优化的运维人员行进路线Fig.6 Path of each worker optimized by AMB-FSA algorithm
4 结束语
本文针对电能计量设备运维作业优化问题,提出了一种基于智能算法的求解方案。首先,建立了电能计量设备运维作业优化数学模型;其次,针对人工鱼群算法及其主流改进方法存在的问题,引入人工鱼个体的多行为模式及其自适应选择机制,并提出了自适应多行为模式的人工鱼群算法AMB-FSA;最后,将AMB-FSA算法应用于求解电能计量设备运维作业优化的实际问题。仿真分析表明,本文所提出的AMBFSA算法较AFSA以及PSO-FSA等算法而言具有更高的优化精度和较低的算法复杂度,能够完成对电能计量设备运维作业优化问题的准确、高效求解。
