基于二维码的可见光室内定位方法及实现
2017-12-20陈晓红洪文昕郑加金
陈晓红,钱 晨,洪文昕,郑加金,韦 玮
(南京邮电大学 电子与光学工程学院,江苏 南京 210046)
基于二维码的可见光室内定位方法及实现
陈晓红,钱 晨,洪文昕,郑加金,韦 玮
(南京邮电大学 电子与光学工程学院,江苏 南京 210046)
针对当前可见光室内定位系统结构复杂、精度偏低的问题,文中提出了一种基于二维码的可见光室内精确定位方法。首先,通过对不同的LEDs光源加载与其自身相关的LED-ID信息,以二维码图像形式进行发送,由手机端的摄像头接收光源信息,并进行解码,实现初步定位;然后,利用基于世界坐标系的简单三角函数关系给出精确定位算法,并结合手机端获得的方位角信息,进一步计算用户所在位置,从而实现可见光室内精确定位功能。实验结果表明,该系统运行可靠,定位精度可达到4.167 cm。
室内定位;可见光室内定位;二维码;LEDs
随着智能手机的普及、移动数据业务的增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、大型展厅、仓库、超市、图书馆、地下停车场、矿井等,常需要确定移动者或设施、物品的位置信息。但是,受定位时间及复杂室内环境等条件的限制,目前比较完善的室外定位技术还无法用于室内并实现高精度定位。因此,寻求一种具有普适性、低功率、高精度等优势的室内定位技术迫在眉睫。作为室内无线定位技术的补充,基于LED的可见光通信室内定位技术以其低成本、无电磁干扰、无需频谱认证、能够在射频受限等区域使用等优势[1-2],近年来引起了人们的广泛关注[3-6]。目前,可见光室内定位技术主要采用的算法有:三角测量法[7]、场景分析法和邻近法。其中,三角测量法包括到达时间(Time of Arrival,TOA)、到达时间差(Time Difference of Arrival,TDOA)、接收信号强度(Received Signal Strength,RSS)、到达角度法(Angle of Arrival,AOA)[8]以及连续角测量法(Continuous Angle Detection Method)[9]等。基于TOA法[10]的参考点和目标点之间由于需要严格的时钟同步,使其在应用上带来了诸多不便。TDOA法测量的是不同参考点的信号到达时间差,解决了TOA的同步问题。文献[11]利用3个不同频率信号间的相位差来计算TDOA值,并进行了仿真计算。RSS法通过信号的传播损耗以及路径损耗模型计算得到参考点与目标点之间的距离,是一种理想的模型定位方法[12]。AOA法通过成像接收器测量信号相对于参考点的到达角度,其主要特征是无需同步。但因受成像接收器分辨率的限制,当目标点远离参考点时,AOA法定位精度将会急剧下降[13]。与其他三角测量法不同,文献[14]中的连续角检测法,用于计算移动终端和光源之间的水平距离。该方法需要事先了解光源的尺寸并依赖于接收机的定向信息,其概念验证实验获得了10 cm的精度。场景分析法分为两个阶段[15]:(1)收集采样点的位置信息,即“指纹”,建立指纹库;(2)根据实时接收到的“指纹”与指纹库相匹配,实现定位。与三角测量法相比,由于场景分析法无需计算,只需匹配数据,因此大幅减少了定位时间。但对一个特定的环境而言,该方法需要准确地预先收集指纹库,所以无法在一个新场景及时调用。邻近法依赖于密集的已知位置网格参考点,当移动目标从单一参考点采集信号时,则被认为是协同定位于该节点,从而实现定位。其理论定位精度不超过网格本身分辨率,为了提高定位精度,需要更多的光源,这将引起成本提高、干扰及照明等问题[16]。
综上可知,目前大部分可见光室内方法均有其相应的优缺点,且仍以模拟仿真研究为主。因此,研究并实现一种低功耗、低成本、高精度的可见光室内定位系统具有重要的现实意义。二维码技术是一种最新的集信息编码、信息传递、图像处理、数据加密于一体的条码技术[17]。目前,二维码技术在世界各国包括我国发展迅猛,在众多的领域发挥着重要作用。目前应用最广泛的二维码技术是QR码,该技术利用三个定位图形的比例不变性,使其具备抗图形几何失真的能力,在旋转、倾斜等角度下扫描畸变图形,仍能通过仿射变换准确的恢复图形内各点像素值,提取信息。随着移动互联网及智能手机的发展,中国智能手机用户已超过4亿,这些手机具备安装智能软件的能力,且具有良好的扫描二维码的能力。因此,本文顺应这一良好的发展契机,在智能手机现有设备的基础上,结合QR码识别速度快、抗图形几何失真、纠错能力强等优势,提出了一种基于二维码的低成本、快速、高精度的可见光室内定位方法。基于这一设计思想,本文在光源控制端对LEDs阵列光源加载与其位置相关的QR码信息,在手机端可通过解码实现初步定位。在此基础上,本文研究了基于该系统的室内精确定位算法,并在Eclipse平台开发实现了该算法模块。本文同时搭建了基于Anddriod平台的智能手机定位APP,实现室内精确定位功能。
1 定位方法及原理
1.1 定位方法
本文提出的基于二维码的可见光精确定位方法,包括初步定位和精确定位两个过程。如图1(a)所示为初步定位框架图,包括控制端、LEDs光源及手机端三部分。其中,控制端通过驱动电路对不同的LEDs光源加载与其自身位置相关的LED-ID信息,并以QR码图像形式发送,其定位信息加载方式将在下文进行详细阐述。该定位信息通过无线光链路传输到手机端,手机端包括与QR码相关的解码模块和定位处理模块。通过解码模块解析得到LED-ID,获取LEDs所处的位置信息,从而确定该光源的覆盖区域,实现初步定位过程。
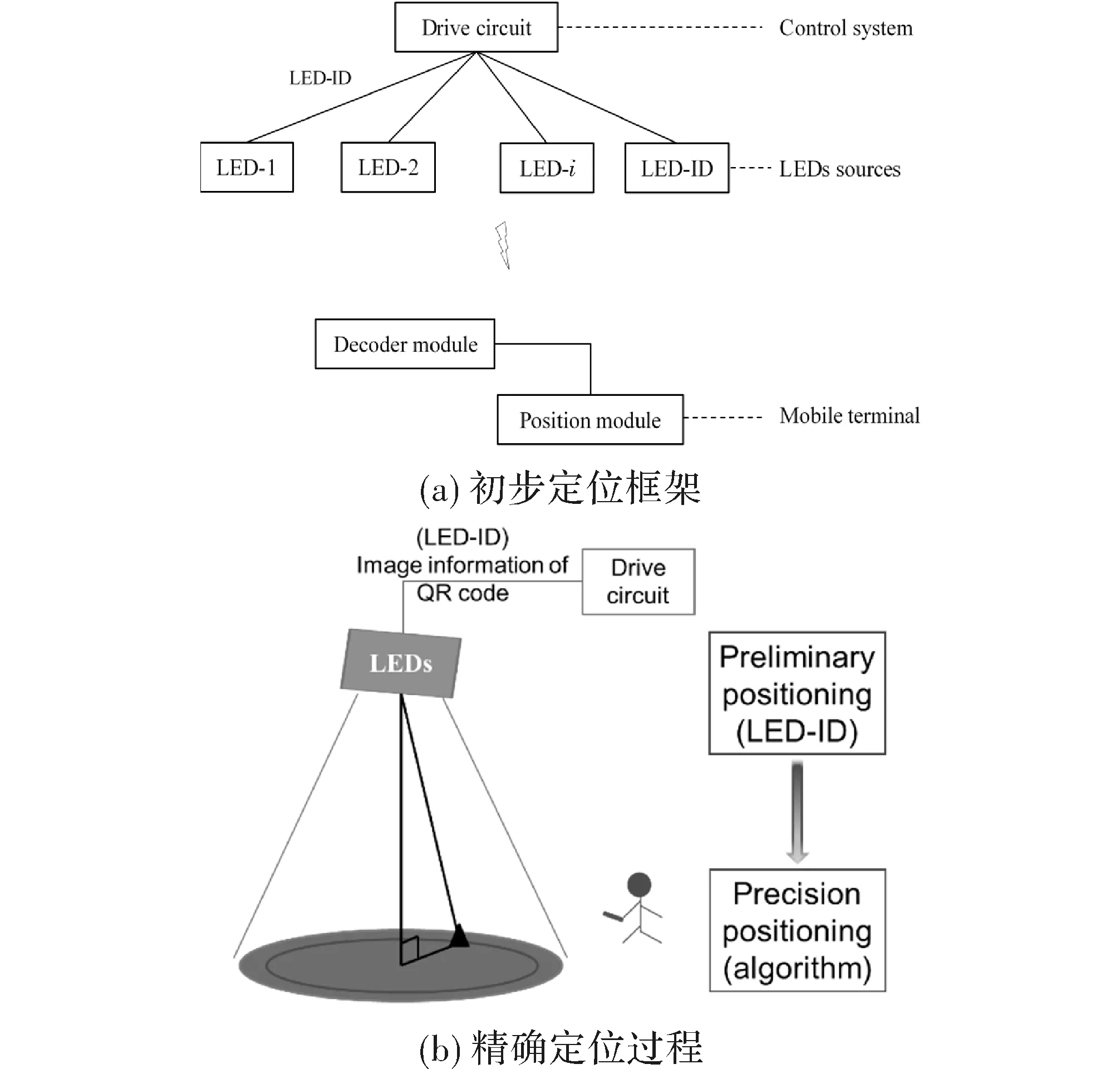
图1 基于二维码的可见光室内定位方法示意图
图1(b)是获得LEDs光源位置信息后的精确定位过程示意图。首先,当手机持有者进入图中蓝色区域(该光源覆盖区域)时,通过智能手机摄像头即可解码获得LED-ID,实现初步定位;其次,通过本文提出的精确定位算法计算得到手机端与该LEDs光源的绝对水平距离,缩小其定位范围(如图中圆圈所示);最后,利用手机的方向传感器获得其方位角θ,从而确定手机持有者的精确位置(图中三角形处),实现精确定位过程。
1.2 LED-ID定位信息加载方式
基于上述光源信息的设计思想,本文研究了LED-ID定位信息的加载方式。根据QR码的阵列图形结构以及黑白像素值的特点,文中LEDs光源为阵列结构,各点光源之间发送相互独立的光强度信号,各点光源位置用“光强强”表示二进制“1”,“光强弱”表示二进制“0”,一次发送的“平面图像”信号为一“帧”,其光强的“强”和“弱”排列组成QR码图形。根据QR码定位模块的特殊设计,本文在LEDs光源的3个顶角处规划出了3块“回”字形定位图形区域,其光照度强弱比值为1:1:3:1:1。这种比例特性不因整个图像的旋转、倾斜而改变,因此3个定位块能够被快速定位检测到。每一个LEDs阵列的一帧图像包括该LEDs的位置信息LED-ID。图2为一盏LEDs光源点亮一帧QR码图像示意图。图中黑、白点分别表示发光强度弱、强的LED点光源,其黑白灰度值分别设为0、255,采用的QR码图像的模块数为25×25,纠错等级为M级(15%)。

图2 一盏LEDs光源点亮一帧QR码图像示意图
1.3 精确定位算法
基于世界坐标系的简单三角函数关系,结合手机持有者所在的方位角信息,本文提出了一种可快速计算得到手机端具体位置的精确定位算法,其计算过程如图3所示。其中, 为LEDs距离地面的高度, 为手持手机的高度,d是手机与LEDs的水平距离,α为手机到LEDs的俯仰角(通过调用手机的水平仪间接获得),记手机水平仪的角度读数为β。若手机所在平面与LEDs阵列光源到手机所在平面处于垂直状态,则有α=90°-β。根据图4所示的距离关系,可得到LEDs阵列与手机之间在世界坐标系下的三角函数关系公式为

(1)
其中,H已知,h可通过成人手持手机高度的分布来获得。由此可通过上述三角函数关系进行LEDs光源与手机之间的绝对水平距离计算,得到

(2)
通过给定俯仰角α的误差范围,利用手机端的方向传感器获得手机持有者所在的方位角θ信息,根据式(2)的绝对水平距离,进而快速获得手机持有者在该LEDs阵列下的具体位置信息,实现精确定位过程。
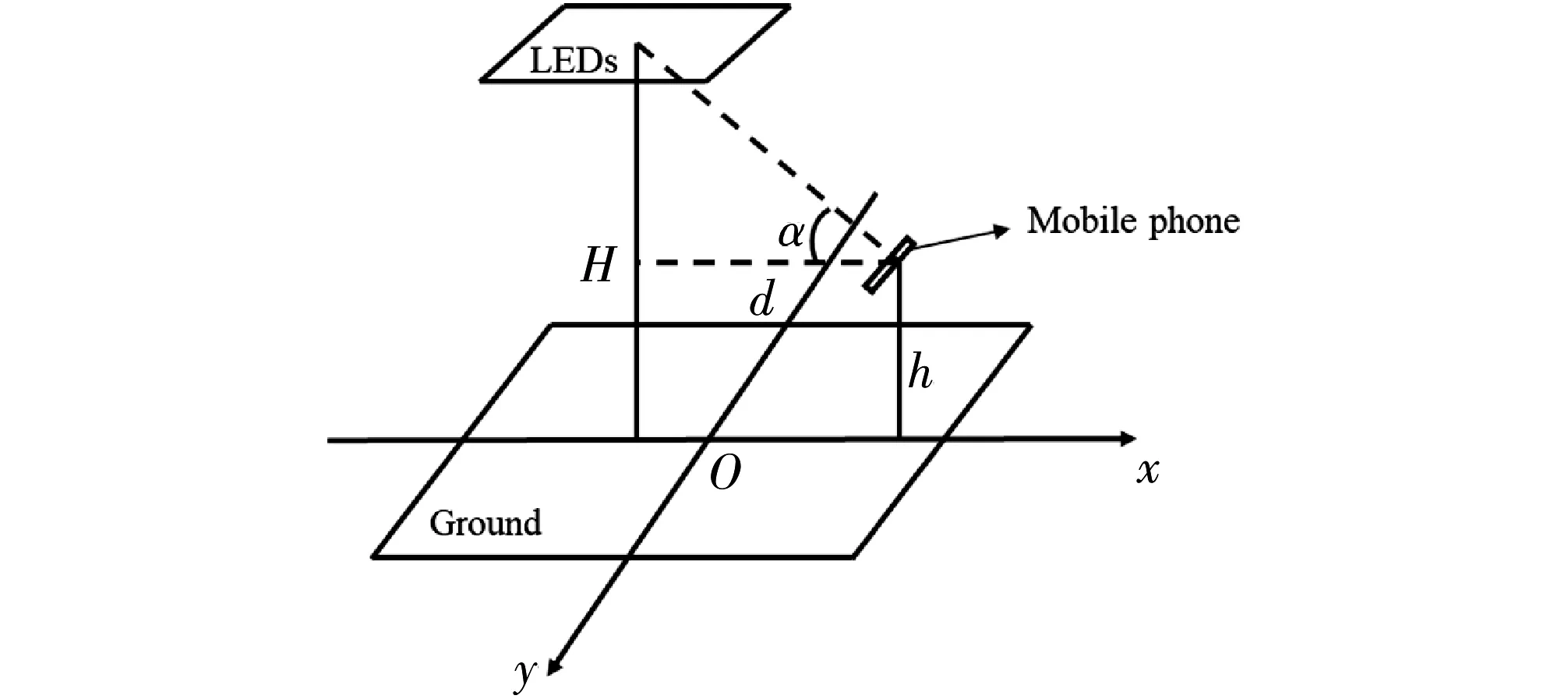
图3 手机端的精确位置计算过程示意图
2 定位系统设计与实现
2.1 实验环境及条件
与理想的室内光照模型不同,本文采用的是一幢教学楼小型办公室的实际场景,办公室内有桌椅、空调等家具物品,具有普遍性,其LEDs光源布局如图4(a)所示。L、W、H分别为房间的长、宽、高。该模型采用2×2 LEDs阵列光源分布,每一个LEDs阵列由64×64个LED组成,并位于高2.7 m的天花板上,LEDs阵列光源的中心位置坐标(单位:cm)分别为(279,171,264)、(471,171,265)、(471,631,265)和(279,631,265),手机接收平面h=110 cm。

图4 实验场景模型
室内空间平面图如图4(b)所示,其相应的4盏LEDs光源承载的图像信息格式分别为
{"ID":1,"X":279,"Y":171};
{"ID":2,"X":471,"Y":171};
{"ID":3,"X":471,"Y":631};
{"ID":4,"X":279,"Y":631}。
以第一盏LEDs光源信息{"ID":1,"X":279,"Y":171}为例,表示该QR码图像携带的LED-ID序号为1,位置坐标信息(x,y)为(279,171),单位为cm。
2.2 智能手机端APP
根据上述定位原理,本文研究开发了基于Andriod平台的智能手机端定位APP—室内定位测试版。该软件开发环境为Eclipse平台,编译完成后将APK文件发送至手机内,安装成功即可运行,其定位过程如下:
(1)开启定位软件。根据用户需求,可通过该软件设置选择开启前置摄像头还是后置摄像头;
(2)微调手机的手持姿态,使LEDs光源进入摄像头的成像界面。为方便快速识别LEDs光源信息,本文在研究原理样机的过程中在室内定位测试版软件界面的右前方放置了前视监视框;
(3)探测LEDs信息图像。若能够探测到LEDs信息图像则对其接收到的信息图像进行解码,并通知地图绘制器进行地图绘制,否则转步骤(2);若解码成功,则关闭摄像头,进入步骤(4),否则转步骤(2);
(4)位置计算过程。根据解码得到的LEDs信息以及手机水平仪及方向传感器所获得的角度信息,并利用本文提出的精确定位算法,计算得到实测的位置信息及其误差范围,如图5所示;
(5)地图显示。根据步骤(4)的计算结果,刷新地图,绘制坐标,并将计算得到的位置信息及其误差范围显示在室内地图上。

图5 室内定位软件测试版界面
3 实验数据分析与讨论
基于上述设计方案,本文对3部不同型号的手机进行了相关测试,测试情况见表1。其中,中兴Blade G Lux由于像素较低,仅适合于近距离解码。图5为魅族M2的室内定位测试版软件界面,其地图显示界
面的分辨率为(800×50),4个方形为LEDs光源位置,圆为初始化的误差范围,圆心为实测位置点,占1个像素大小。圆的大小与手持手机的水平倾角相关。
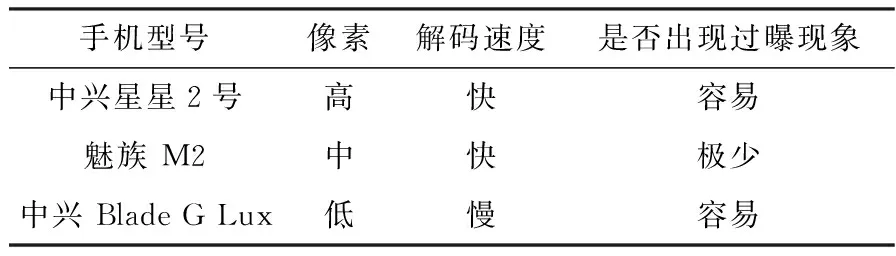
表1 不同型号的手机测试情况
由表1测试结果可以看到,在测试过程中出现了过曝现象。经分析,由于一般的安卓智能手机的摄像头测光模式为平均测光,故而易出现过曝现象。而魅族M2可选取中点测光模式,因此不易出现曝光问题。
以魅族M2为例,在手机上安装本文所研发的室内定位APP,对图4所示的实际场景进行实地采样测试,验证该定位系统的正确性和可行性。图6为1号及4号LEDs光源附近实测时的地图显示界面,解码信息分别为{"ID":1,"X":279,"Y":171}、{"ID":4,"X":279,"Y":631},解码准确。测定后所得数值分别为29和28,相对应的实际值为30和24,定位误差分别为1 cm和4 cm。

图6 地图界面
测试过程中,本文任意选取了16个采样点进行了测试,获得了4.167 cm的平均误差,采样点(Sample Points,SP)的实测结果如表2所示。其实际值(Real Value,R)与测得值(Test Value,T)是根据当前位置解码得到的LED-ID信息;所获得的当前位置到该LEDs的绝对水平距离,误差(Error,E)由实际值与测得值的欧式距离公式推算得到

表2 采样点的实测结果 /cm
通过与目前几种主要的可见光室内定位方法相比较可以看出,虽然TDOA、RSS方法的定位精度能够达到毫米级,但其仅限于仿真精度,其硬件及算法复杂度较高,不易实现。AOA法虽能够达到4.6 cm的实验精度,但由于受到像接收器分辨率的限制,当目标点远离参考点时,其定位精度将会急剧下降。本文方法的精度达到4.167 cm,并且该方案布置成本低,用户在定位过程中无需使用附加设备,只需在手机端安装其定位软件即可实现。此外,该算法简单易实现,大幅降低了可见光室内定位系统的硬件及算法的复杂度。

表3 几种主要方法的性能对比
4 结束语
相比于传统的室内无线定位技术,基于LED绿色照明光源的可见光定位技术具有泛在覆盖、节能降耗、布设简单等[18]突出优点,有望成为室内定位的主要手段之一。本文充分利用了LEDs现有设备及资源,设计实现了一种能够在手机终端应用的可见光室内精确定位方案,其定位精度达到了4.167 cm。与现有系统相比,该定位具有精度较高,系统硬件及定位算法复杂度低等优势。经实际场景验证,该系统运行可靠,为室内定位技术提供了一套有效的解决方案。
[1] Liu B,Yang Y,Zhu L,et al.Light intensity stabilization in an indoor white LED wireless communication system[J].Journal of Optoelectronics Laser,2010,21(12):1794-1797.
[2] Wu Fengtie,Huang Qilu.A precise model of LED lighting and its application in uniform illumination system[J].Optoelectronics Letters:English Edition,2011,7(5):334-336.
[3] Premachandra H C N,Yendo T,Tehrani M P,et al.High-speed-camera image processing based LED traffic light detection for road-to-vehicle visible light communication[J].Research Gate,2010,43(6):793-798.
[4] Komine T,Lee J H,Haruyama S,et al.Adaptive equalization system for visible light wireless communication utilizing multiple white LED lighting equipment[J].IEEE Transactions on Wireless Communications,2009,8(6):2892-2900.
[5] Lee K,Park H,Barry J R.Indoor channel characteristics for visible light communications[J].IEEE Communications Letters,2011,15(2):217-219.
[6] Liu H,Darabi H,Banerjee P,et al.Survey of wireless indoor positioning techniques and systems[J]. IEEE Transactions on Systems Man & Cybernetics Part C,2007,37(6):1067-1080.
[7] Brás L,Carvalho N B,Pinho P,et al.A review of antennas for indoor positioning systems[J]. International Journal of Antennas & Propagation,2012(1):1497-1500.
[8] Burda R,Lewandowski A,Wietfeld C.A hybrid indoor localization using beacon enabled meshing and TOA in IEEE 802.15.4 networks[C].Calgary:Vehicular Technology Conference,Vtc Spring,IEEE,2008.
[9] Zhang W, Kavehrad M. Comparison of VLC-based indoor positioning techniques[J]. Proceedings of SPIE - The International Society for Optical Engineering, 2013, 8645(12):1372-1375.
[11] Jung S Y,Hann S,Park C S.TDOA-based optical wireless indoor localization using LED ceiling lamps[J].IEEE Transactions on Consumer Electronics,2012,57(4):1592-1597.
[12] Kavehrad M,Deng P.Indoor positioning algorithm using light-emitting diode visible light communications[J].Optical Engineering,2012,51(8):5009-5018.
[13] Tanaka T,Haruyama S.New position detection method using image sensor and visible light LEDs[C].Dubai:Second International Conference on Machine Vision,IEEE Computer Society,2009.
[14] Liu X,Makino H,Maeda Y.Basic study on indoor location estimation using visible light communication platform[C].Vancouver:30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society,IEEE,2008.
[15] 方爽,郭杭,洪海斌,等.一种虚拟空间划分的室内指纹库定位方法[J].测绘科学,2015,40(1):93-97.
[16] Lee Y U, Kavehrad M. Hybrid positioning with lighting LEDs and ZigBee multihop wireless network[J]. Proceedings of SPIE - The International Society for Optical Engineering,2012,82(1):16-28.
[17] 于英政.QR二维码相关技术的研究[D].北京:北京交通大学,2014.
[18] 陈晓红.室内可见光多参量位置指纹库定位方法的仿真及实验研究[D].南京:南京邮电大学,2015.
A Scheme of Indoor Visible Light Positioning Method Based on Two-Dimensional Code
CHEN Xiaohong,QIAN Chen,HONG Wenxin,ZHENG Jiajin,WEI Wei
(School of Electronic and Optoelectronics Engineering,Nanjing University of Posts and Telecommunications,Nanjing 210046,China)
Aiming at the problem of the low accuracy and complexity of existing indoor positioning system, a scheme of indoor visible light positioning method based on two-dimensional code was proposed in this paper. First, different LEDs light source was loaded with the LED-ID information data and was transmitted in a two-dimensional code image. The initial positioning was achieved through light source information
by the camera of mobile phone and information decoding. Then an accurate positioning algorithm based on trigonometric function relationship was presented. With utilizing of the accurate positioning algorithm and azimuth angle of mobile phone, the user’s location was further calculated to achieve accurate positioning of visible light room function. The principle prototype based on Android platform was set up, and the error experiment with sixteen sample points was carried out on the designed platform. The effectiveness of the proposed positioning method was validated by the experiments. The experimental results demonstrated that the accuracy of 4.167cm could be achieved by this positioning method.
visible light; indoor positioning; two-dimensional code; LEDs
2017- 09- 28
国家自然科学基金 (61601237);江苏省自然科学基金(KB20160901);江苏省高校自然科学研究面上项目(16KJB420001)
陈晓红(1989-),女,硕士,助理实验师。研究方向:光通信和图像处理。韦玮(1960-),女,教授,博士生导师。研究方向:新型光信息功能材料与器件的设计、制备与应用研究。
10.16180/j.cnki.issn1007-7820.2017.12.010
TN929.1
A
1007-7820(2017)12-034-05
