光纤以太网技术在水下拖曳系统中的应用
2017-12-19海军驻昆明七五试验场军事代表室孙现有
海军驻昆明七五〇试验场军事代表室 郭 勍 孙现有
七五〇试验场 朱 强
光纤以太网技术在水下拖曳系统中的应用
海军驻昆明七五〇试验场军事代表室 郭 勍 孙现有
七五〇试验场 朱 强
介绍了基于新型水下拖曳系统的技术特点设计的光纤通信系统方案,着重解决多节点串行、大数据高速传输等关键技术问题。其中重点阐述了通信系统的架构设计,光纤以太网技术的应用,全面有效的通信协议设计。在实际的水下拖曳系统中检验了通信方案的有效性。
光纤以太网;拖曳系统;FPGA
0 引言
水下拖曳系统作为一种有效的探测平台,广泛应用于海洋资源勘探、地球物理学测量、海洋研究与监测及军事等诸多领域,并随着海洋开发的日益深人,其发挥的作用也越来越重要。它在海洋环境与海洋资源调查以及国防建设中有着特殊的用途。水下拖曳系统通常由拖曳电缆、拖曳体、专用绞车及干端控制设备组成,拖曳体内可根据不同的用途搭载温、盐、压、营养盐及声纳等各种海洋化学元素探测传感器或声、光等物理探测传感器。拖曳船上的操作者可以通过一定的控制方式实施对拖曳体的轨迹与姿态控制来达到执行不同水下探测任务的目的。
光纤通信作为一种全新的信息传输技术,自诞生之日起便受到人们的广泛关注和重视,时至今日,光纤通信技术已经在诸多领域和行业中应用,成为提升通信质量和效率的重要手段。光纤通信技术依靠光纤作为主要的信息载体,以光波的形式进行数据的传输,这使得光纤通信速度比电信通信技术要更加快捷。光纤通信因其具有的大容量通信、远距离传输、信号串扰小、保密性能好、抗电磁干扰、传输质量佳、尺寸小、重量轻、难于窃听、光缆适应性强、寿命长,备受业内人士青睐,发展非常迅速。
因此,基于水下拖曳系统的特殊需要以及光纤通信技术的技术特点,将光纤以太网技术应用到水下拖曳系统中,将能够解决水下拖曳系统的通信问题。
1 光纤通信系统设计
拖曳系统由干端设备和湿端设备组成。干端设备安装在拖船船舱内,由主控中心和收放装置组成,完成拖曳系统控制、监控、显示,以及水下拖曳系统的收放。水下拖曳系统由拖曳光缆、拖曳阵及拖曳体组成,完成海洋环境下的探测与检测。
如图1所示,光纤通信系统由主控计算机和水下各节点设备通过光缆形成串行环路,基于光纤以太网技术形成光纤通信局域网,数据传输速度可以达到3Gbps。本通信系统只需两路光纤即可完成,即数据下行通路和数据上行通路。因此这可大大减小拖曳光缆的缆径,满足拖曳系统对缆径的需求。
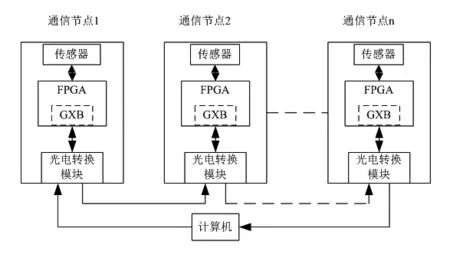
图1 通信系统方案框图
2 光纤以太网技术
以太网技术指的是由Xerox公司创建并由Xerox、Intel和DEC公司联合开发的基带局域网规范。传统以太网络使用CSMA/CD(载波监听多路访问及冲突检测技术)技术,并以10M/100M/s的速率运行在多种类型的电缆上。以太网不是一种具体的网络,是一种技术规范,在IEEE 802.3中定义了以太网的标准协议。光纤以太网技术可以借助以太网设备采用以太网数据包格式实现WAN通信业务。该技术可以适用于任何光传输网络——光纤直接传输、SDH以及DWDM网络传输。目前,光纤以太网可以实现10Mbps、100Mbps以及1Gbps等标准以太网速度。
在嵌入式环境下,符合IEEE 802.3协议标准的以太网是比较合适的链接方式,以太网的数据传输速率高,数传距离远,扩展性强。在本系统中,每个节点通信电路均采用ALTERA公司的FPGA芯片为核心进行设计,ALTERA公司提供了Triple speed Ethernet的IP核。该IP核主要功能特点如下:
(1)兼容IEEE 802.3标准;
(2)支持千兆媒体独立接口(GMII),支持千兆速率操作;
(3)提供ALTERA支持的、在VHDL和Verilog HDL仿真器的功能仿真模型。
3 通信协议设计
通信协议(communications protocol)是指双方实体完成通信或服务所必须遵循的规则和约定。协议定义了数据单元使用的格式,信息单元应该包含的信息与含义,连接方式,信息发送和接收的时序,从而确保网络中数据顺利地传送到确定的地方。
本通信系统包括多种通信设备、十几个通信节点,根据功能需求整个通信需具有多种控制命令格式和数据格式,因此设计一个全面、有效、规范的通信协议,是保障整个系统可靠、有效通信的最重要、最基本的任务。
3.1 数据格式设计
本文依据硬件平台条件、功能需求,设计了能够满足整个通信系统可靠、安全、有效通信的数据格式。本数据通信格式为通用数据格式,不管是控制命令,还是参数、数据命令,均按此数据格式编码。本数据通信格式如表1所示,由目标地址、源地址、命令类型、数据长度和数据组成。
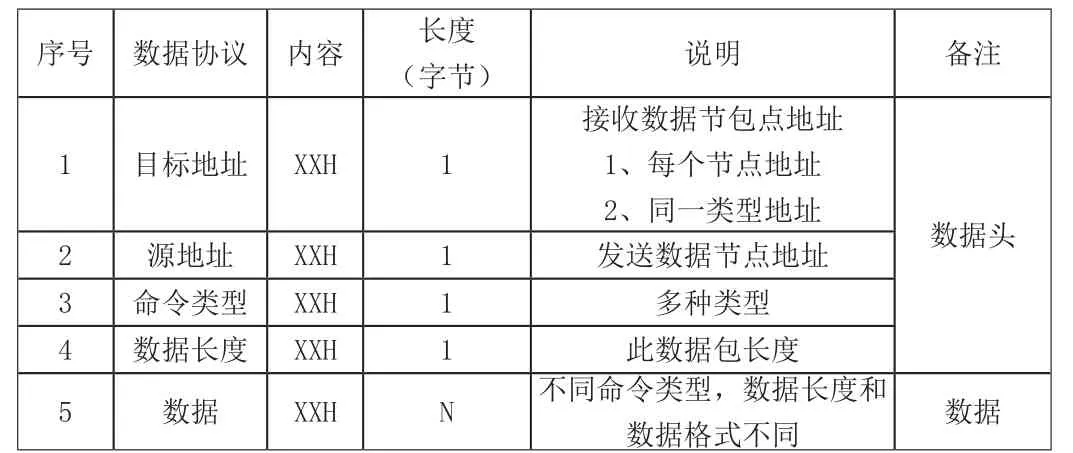
表1 数据格式
3.2 节点地址(ID)设计
ID是英文IDentity的缩写,身份标识号码的意思,是系统中唯一的编码。在本系统中,每个节点都有一个固定ID地址,并根据节点类型进行分类,即把同类的节点分配同一个地址,便于对同一类型节点统一操作。本系统的各个节点地址(ID)详见表2。

表2 各节点地址(ID)分配表
3.3 命令设计
为了满足整个系统的正常工作,把整个光纤网络中的数据通信命令进行了分类,共十几种类型。在通信中各软件可以根据命令类型及ID地址进行判断、识别,并进行相应的处理。其中,开始/停止工作命令、自检命令等命令如下所示:
(1)全部节点自检命令:FFA1 1001 XXXXH;
(2)深度采集电路1节点开始工作命令:C1A1 3001 XXXXH;
(3)全部声呐电路开始工作命令:EEA1 3001 XXXXH。

图2 光纤通信系统软件工作流程图
4 软件设计
整个系统中的每个节点都基于自身的硬件环境开发了相应的软件。软件体系结构采用主从模式,由上位机的控制计算机软件作为主控制端,进行控制命令的发送和各节点的数据、状态的采集、显示等;水下各节点软件通过接收、解析控制计算机软件发送的控制命令,进行相应的操作,并把工作信息上传到控制计算机上。每个节点只接收与自己相关的命令信息,并对与自己无关的信息进行实时无损转发。
整个系统软件的控制流程如图2所示。
5 结论
本文提出的光纤通信系统方案已成功应用于新型水下拖曳系统中,该通信系统能够满足高实时性、高稳定性的性能要求,通信速率达到1.25Gbps,能保证数据高效传输。同时,通信系统结构具有很好的扩充性特点,能够在现有通信系统上进行通信节点的删减和扩充。综上所述,该通信系统方案解决了水下拖曳系统中需要解决的多点串行、数据高效传输的关键技术问题。
[1]周宇昌,李华芳.卫星高速数据传输系统设计[J].计算机工程,2012.
[2]孙榕.现代光纤通信技术的主要特征及发展趋势[J].综合研究,2011.
[3]王金明.数字系统设计与Verilog HDL(第4版)[M].电子工业出版社,北京,2011,1.
[4]闵小平,陆达.基于现场可编程门阵列的高速光纤通信的实现[J].厦门大学学报,2007(4).
[5]周沛,陈冰,陈幼平.基于FPGA 的高速串行链接通信设计与实现[J].仪表技术与传感器,2011(6).
[6]龚垒.基于FPGA的高速光纤通信数据传输技术的研究与实现[D].西安电子科技大学硕士论文,2014.
