Stability control of multi-parameter adaptive wireless communication systems based on multi-Lyapunov function①
2017-12-19SongXiaoqin宋晓勤DongLiLiWenfaTongTingtingLeiLei
Song Xiaoqin(宋晓勤), Dong Li, Li Wenfa, Tong Tingting, Lei Lei
(*College of Electronic and Information Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, P.R.China) (**School of Information Technology, Beijing Union University, Beijing 100101, P.R.China)
Stability control of multi-parameter adaptive wireless communication systems based on multi-Lyapunov function①
Song Xiaoqin(宋晓勤)*, Dong Li②, Li Wenfa**, Tong Tingting*, Lei Lei*
(*College of Electronic and Information Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, P.R.China) (**School of Information Technology, Beijing Union University, Beijing 100101, P.R.China)
With the occurrence of burst interference, bit error rate (BER) stability of the wireless communication system (WCS) always degrades significantly. To cope with it, a stability control algorithm is proposed, utilizing the stability theory of switched systems, which is specifically applicable for multi-parameter adaptive WCS with spectrum sensing ability, and it is capable of stabilizing BER within a reasonable range. Firstly, WCS is modeled as a switched system. Then, based on the multi-Lyapunov function, controlling rules are presented to enable the switched system to satisfy stable condition asymptotically. Finally, analysis and numerical simulation results demonstrate that the switched WCS with the proposed controlling rules is superior to conventional power-controlled WCS with or without state feedback control in terms of stability performance.
switched system, stability control, multi-Lyapunov function (MLF), power control, burst interference
0 Introduction
With rapid development and extensive application of wireless communication technologies, such as software radio and cognitive radio, wireless communication system (WCS) gradually acquires the abilities to sense electromagnetic environment and adjust communication parameters such as transmission power and modulation and coding scheme (MCS). However, due to the time delay in the process of spectrum sensing and parameters adjustment, transmission might be unstable or blocked in case the electromagnetic environment changes dramatically. Therefore, the implementation of stability control in the WCS with the capability of sensing of electromagnetic environment and adjustment of communication parameters (namely, the multi-parameter adaptive WCS hereafter) has become an urgent issue to be addressed.
However, not too many researches can be found on how to realize the transmission stability control in the multi-parameter adaptive WCS. In view of the fact that the stability control theory has always been one of the hottest issues in the field of control, and many achievements have been published[1,2], so it can then be applied in the stability control of WCS with reasonable modifications.
In order to make research on the stability control of WCS, a system model should be established firstly based on the input-output relationship. However, considering the complexity and non-linear property resulting from the process of adaptively adjusting multiple communication parameters in the WCS system, it is quite difficult to search for a unified mathematical equation to describe the dynamic characteristics of the system. Therefore, the concept of hybrid system is introduced to describe the complicated non-linear model. The switched model in stability control theory[3,4], which has received considerable attention in recent researches, is employed to describe the hybrid system made up of several subsystems.
The stability issue of switched system can be analyzed by establishing the system’s Lyapunov function. By designing the Lyapunov function of switched system, one can analyze the system stability and establish the criteria of stability control with the help of linear matrix inequalities (LMI). In Ref.[5], the state interval of system’s switch was divided based on the high and low bound of time variant delay, and a switching rule for the asymptotic stability and the stability of system was designed in the form of LMI, by utilizing a common Lyapunov function (CLF). And in Ref.[6], sufficient conditions of system stability were proposed, based on a quadratic positive definite CLF constructed with a copositive function. However, in analyzing the stability of the switched system, CLF is quite conservative and it is difficult for many switched systems to construct a CLF in practice. Piecewise linear Lyapunov function (PLLF)[7]is an alternative algorithm in defining the conditions of the switched system. However, it is applicable in low-order systems only, due to the large computational burden it may have. For example, it often requires large amount of parameters in the construction of the function.
As a result, for the stability control of a switched system with restricted switching signal, the multi-Lyapunov function (MLF) got more attention[8,9]. In Ref.[8], MLF was combined with the output feedback controller to satisfy the global stability of closed-loop switched systems. In Ref.[9], the sufficient condition of exponential stability in closed-loop systems was derived by using MLF considering mode-dependent average resident time. Based on this stability result, a switching strategy to stabilize the system can be designed. In practice, switched systems are always used to describe the control systems with feedback link and time-varying parameters, and utilize the MLF approach to achieve the stability and stabilization criteria for systems with distribution or feedback delays, such as the networked control systems[10-12]. In Ref.[10], the stability of the networked control systems with state feedback control was addressed by considering the time delay induced by the short network, under the conditions with or without interference. Firstly, with MLF and LMI approach, the sufficient condition for the stability of the networked control systems was proposed. Then, the stability control rules of the systems with state feedback control were designed based on MLF. By solving solvable problems and optimal solutions of LMI, parameters of state feedback controller could be obtained. In Ref.[11], by applying linear switched systems to random delay networked control systems, the analysis could be simplified, which was independent from the variable system state matrix. Similarly, in Ref.[12], the stability of a networked control system was analyzed, in case the delay in the closed-loop was time variant. The scope of delay was discretized according to the high bound of time delay so that the system was modeled as a switched system, and then, based on MLF, the stability criteria was proposed to achieve better performances when the system suffered from time-varying delay.
In view of the aforementioned problems, a control rule algorithm is proposed in this paper to stabilize the multi-parameter adaptive WCS, based on the theory of networked control system with feedback channel. With the presence of burst interference, it is able to meet the requirements of stability control of the multi-parameter adaptive WCS. The major innovations of this paper are as follows: firstly, the multi-parameter adaptive WCS is modeled as a linear switched system, so that the stability theory can be used to analyze it at the cost of low complexity. Secondly, by taking advantages of the MLF, such as the ease of establishment and relatively low conservatism, the paper proposes the stability control criteria for the multi-parameter adaptive WCS. Specifically, by defining each modulation and coding mode as a subsystem of the switched system, and by constructing the MLF for each subsystem, the conservatism of stability criteria is reduced significantly.
The rest of this paper is organized as follows. The model of multi-parameter adaptive WCS is described in Section 1, and then in Section 2 the fundamental principle of stability control algorithm is presented. The numerical analysis and simulation results of the proposed algorithm are provided in Section 3. Finally, Section 4 concludes the paper.
1 Problem description and modeling
The multi-parameter adaptive WCS studied in this paper can adaptively select the most efficient MCS according to the change of channel conditions under the condition of BER performance. The WCS model with a feedback link that can adaptively adjust its transmission power and MCS is shown in Fig.1.
After sensing the electromagnetic environment, it can be guaranteed that the bit error rate(BER) in the receiver is lower than the target BER by adjusting the sender’s MCS and transmission power.
According to the multi-parameter adaptive WCS model, communication parameters are under the following assumptions:
(1) The transmission power of the sender is PS; the transmission channel is Rician channel; and the average noise power of the channel is PN.
(2) Without considering the free space propagation loss, PSand PNare represented by dBm. When there is no interference, the signal to interference plus noise ratio (SINR) in transmission process can be simplified to SINR=PS-PN.
(3) The interference power Piin the channel can be estimated.
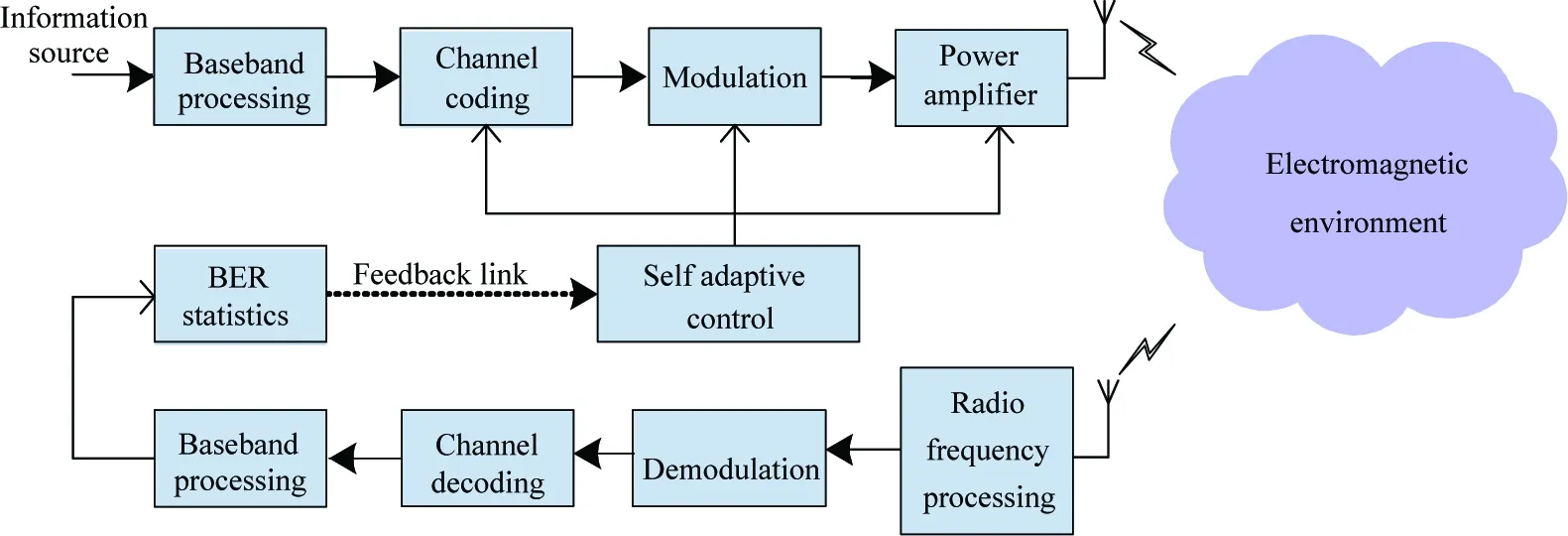
Fig.1 Model of the multi-parameter adaptive WCS
(4) Pedenotes the BER in the receiver under PS, and Perdenotes the target BER.
(5) There are M kinds of MCSs in the system, and i denotes the current subsystem (represents the system under the ith MCS), i∈{1,…,M}.
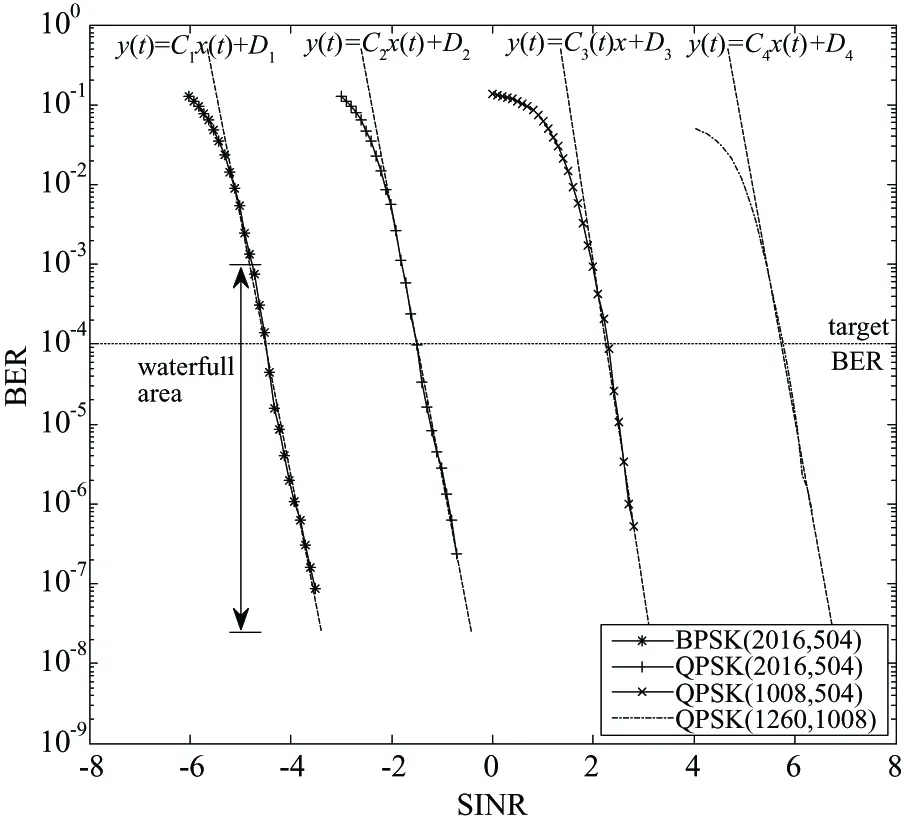
The diagram of BER of different MCSs is shown in Fig.2.
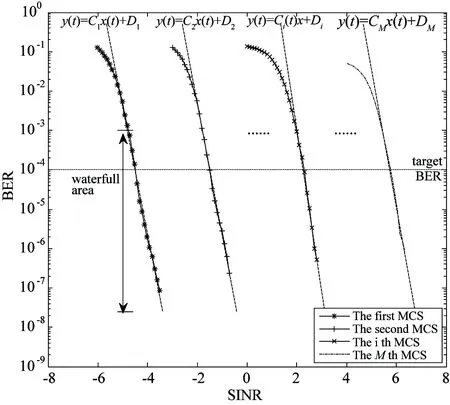
Fig.2 BER under different MCSs
The purpose of the modeling is to divide the system into M subsystems according to different MCSs. The ith subsystem is described as the following linear differential switched equations:
(1)
Here Ai, Bi, Ci, Diare constants, standing for the ith subsystem’s dynamic characteristic coefficient, the control coefficient, the sensing coefficient, and direct items, respectively.
PSis selected as the control input variable u(t); SINR at the receiver is selected as the system’s state variable x(t); while Peis selected as the output variable y(t).
As indicated in Fig.2, each BER curve has its waterfall area, where the index value of the BER goes down linearly with the rise of SINR. For this reason, the BER curve of each MCS is approximate to a straight line in the waterfall area. According to Fig.2, the relationship between BER and SINR under certain MCS can be represented by linear equation. Then those M MCSs can be described as the following equations:
(2)
where i∈{1,…,M}, y(t)∈(-∞, 0.5].
Under the ith MCS, when there is no interference, the system state at moment t consists of the control input u(t) and the current noise power which is supposed to be measured precisely, then
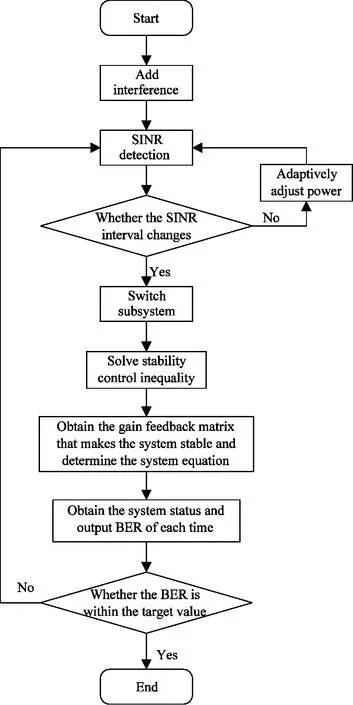
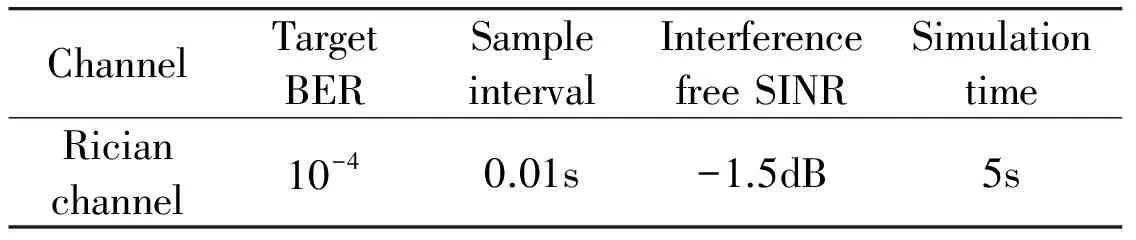
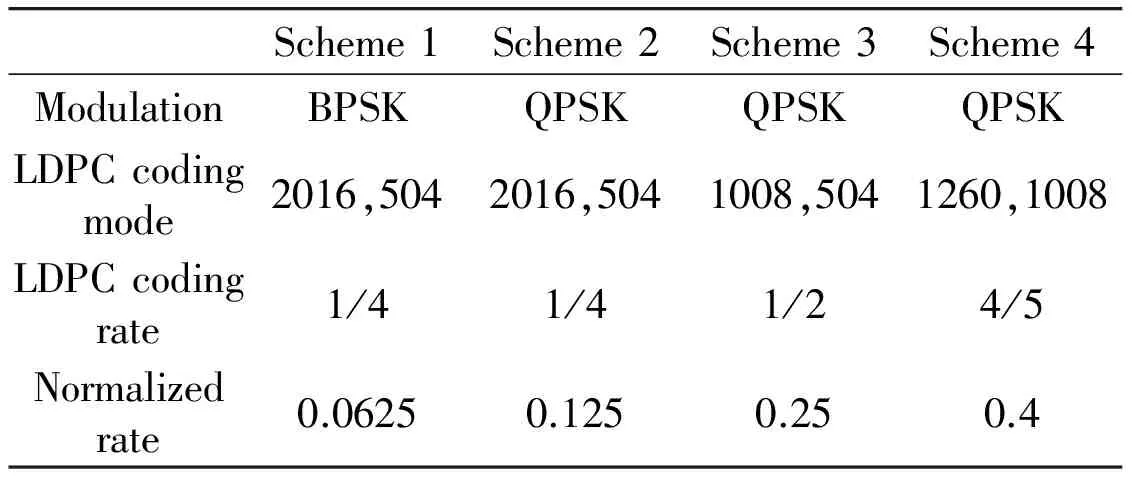
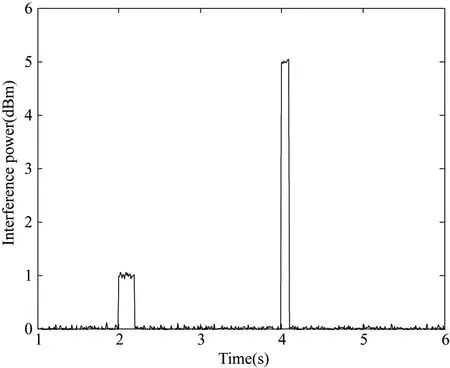
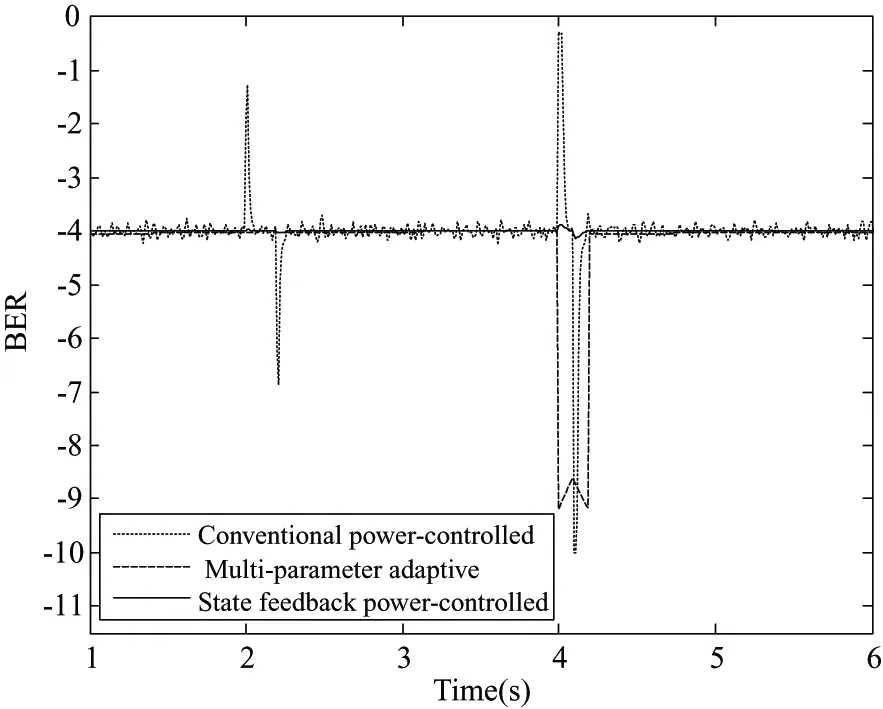
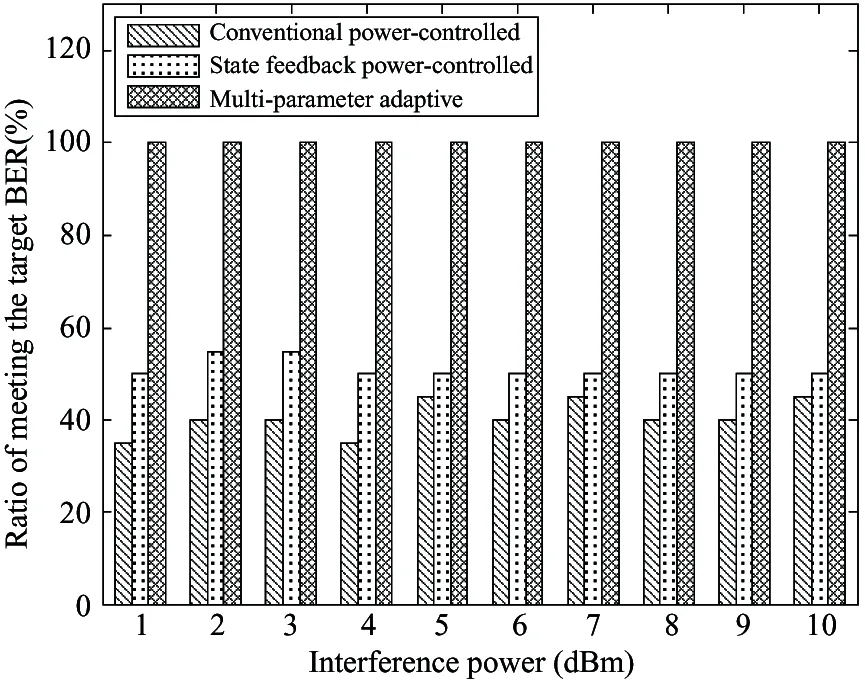
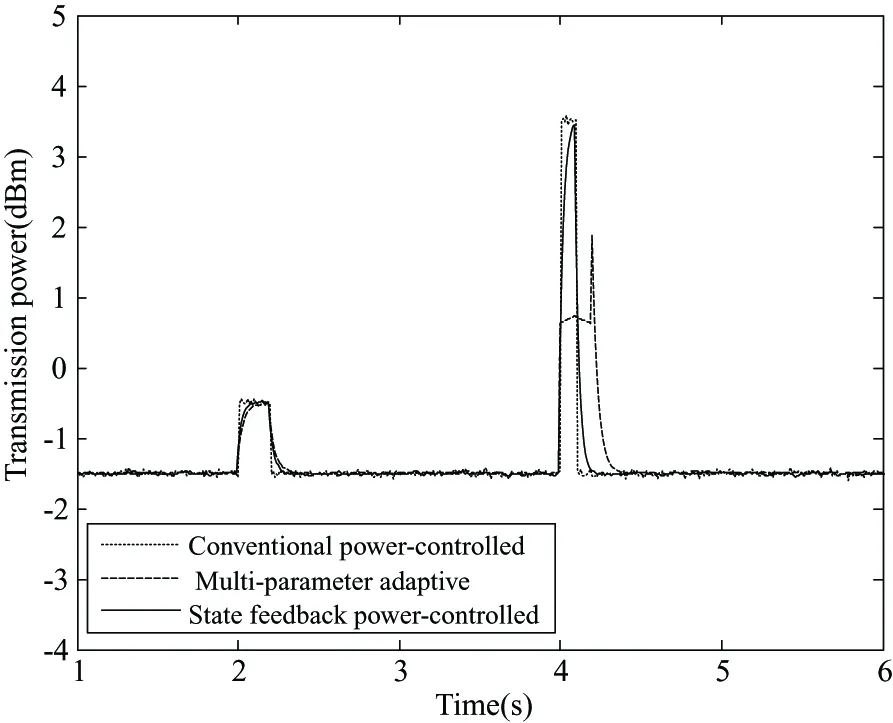
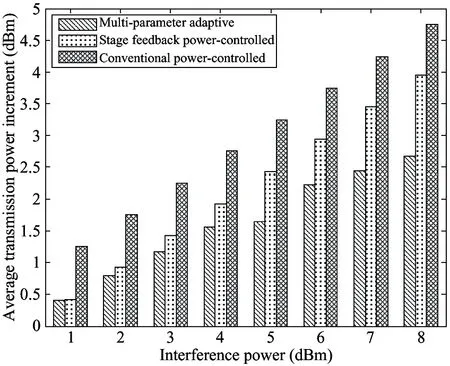
xi≤x(t) According to Eq.(3), the change rate of SINR with respect to time is =-x(t)+u(t)-PN(t) xi≤x(t) Therefore, combining Eq.(2) with Eq. (4), the ith subsystem can be modeled as a switched system in the form of state space equations, as shown below: xi≤x(t) In this case, Ai=-1,Bi=1, the values of Ciand Diare determined by the slope and intercept of the certain straight line that describes the relationship between BER and SINR under a specific MCS. The switching control rules for the multi-parameter adaptive WCS are as follows. Divide the range of SINR into several switched state intervals, each of which corresponds to a MCS. When the system is disturbed, and if the interference is so intense that the instant SINR changes from one SINR interval to another, which means the corresponding MCS is also changed, the system switches the MCS first and then adjusts the transmission power to maintain the target BER. If the interference is too weak to change the instant SINR interval, then the system adjusts the transmission power only. While sensing the electromagnetic environment, the system adjusts its communication parameters, such as the transmission power and MCS. In these circumstances, the stability control of the multi-parameter adaptive WCS works to stabilize the system and converge the BER to the target value. The principle of the stability control algorithm is described in detail below, whose basic idea is to add a stability controller into every switched subsystem of WCS, and then provide a sufficient condition to stabilize the system’s BER through MLF. After that, the calculation method of gain feedback matrix of the controller and system state equation can be determined. If the switched subsystem is required to have an output BER that stabilizes fast to the target value through transmission power adjustment, an appropriate state feedback is needed to configure the eigenvalue of the subsystem. Therefore, a state feedback controller with integral link is added to the feedback link of every subsystem and the control rules are as follows: (6) where i∈{1,…,M}. When the WCS switches randomly to any MCS, the corresponding controller helps control its stability performance. There is a new state z(t) established in the controller as a feedback term, which is equal to the integration of error signal, that is dz(t)/dt=y(t)-r (here r is the target BER). kiis a normal state feedback coefficient, and kiiis the integral coefficient that provides the zero steady-state error. Finally kriis used to set the rated input for the expected steady state. After adding the new state, the state space equations of the system are expanded as xi≤x(t) where value z(t) is not given, instead, it is automatically adjusted so that dz(t)/dt=y(t)-r=0, which means the output will be made equal to the target value at the equilibrium point. Besides, ye=r can be ensured by selecting the proper value of kii. (8) where =Ai-Bi·kni (9) Based on MLF, a sufficient condition for asymptotically stabilizing the multi-parameter adaptive WCS and the calculation method of kniof the aforementioned controller are investigated as follows. Lyapunov asymptotic stability theorem: The basic idea is to use the concept of energy variation to analyze the stability of system. If the storage energy is dwindling over time while the system is in motion, then the system is to be stable; if not dwindling, it is unstable. Given a scalar function V(x) that indicates the energy of the system, if the scalar function is positive-definite, and The following lemma is used to the next proof of inference. (1) S<0 Finally, according to the Lyapunov asymptotic stability theorem and the lemma, the following conclusions are reached. Inference: Suppose that i, j∈{1,…,M}2, where M is the total number of the MCSs, and that the corresponding {Ai, Bi, Ci, Di} are controllable. For the closed-loop power adaptive WCS that can be regarded as a switched system in Eq.(6). If there exists M symmetric positive-definite matrices Xito ensure the formula (10) tenable, then the switched system is asymptotically stable when the system switches from the ith subsystem to the jth subsystem. By solving the inequality, kniof the controller can be computed. (10) This inference provides a sufficient condition for Eq.(5) to realize the asymptotical stability via Eq.(6). It is proved in the following. ΔV(Φ(t))=V(Φ(t+Δt))-V(Φ(t)) =ΦT(t+Δt)PjΦ(t+Δt) -ΦT(t)PiΦ (t) (11) (12) (13) Hence, the inference can be applied to stability control of the system and used to obtain kni. Then put kniinto Eq.(9), so that Liand system state Eq.(8) can be determined. With the occurrence of burst interference in communication channels the state and control input and output of each time can be solved based on Eq.(8) by using the measure of four-order Runge Kutta method[13]. Specific steps are as follows: (1) In order to solve all parameters at moment i+1, the first slope K1=Ab(xizi)T+Bbr should be solved at moment i firstly, and then the second slope K2=Ab(xi+hK1/2zi+hK1/2)T+Bbr. In the same way, the third slope K3=Ab(xi+hK2/2zi+hK2/2)T+Bbr and the fourth slope K4=Ab(xi+hK3zi+hK3)T+Bbr can be solved. After that, the weighted average number of them is used as the approximate value of the average slope Kn. (2) Let x(i+1)=x(i)+h×Kn. (3) Obtain output BER y(i+1) at moment i+1 and control input u(i) at moment i (4) Repeat these above steps to obtain the system state and output values of all sampled points. The flow chart of stability control rules and calculation methods is shown in Fig.3. When the system is disturbed, detect the SINR and determine whether the instant SINR interval changes. If the interval doesn’t change, the system only adjusts the transmission power to maintain the target BER. If the interval changes, then switch the subsystem corresponding to original SINR interval to the subsystem corresponding to current SINR interval. By solving the stability control inequality in the inference, the gain feedback matrix and the system state equation are obtained. Thus the system status and control output of each time can be determined. Finally, judge whether the output BER is under the target value. If the condition is met, the algorithm is finished; otherwise, return to SINR detection. In this section, simulations are performed to compare the performance of the proposed stability control for multi-parameter adaptive WCS with the conventional power-controlled WCS with or without state feedback control[14]. The simulation parameters are shown in Table 1. Fig.3 Flow chart of stability control rules and calculation methods Table 1 Simulation parameters ChannelTargetBERSampleintervalInterferencefreeSINRSimulationtimeRicianchannel10-40.01s-1.5dB5s The self-adaptive modulation-code system in this paper utilizes BPSK and QPSK combined with LDPC code to form 4 combinations with the proper BER interval, as shown in Table 2. Table 2 Chosen MCSs The diagram of BER of 4 MCSs is shown in Fig.4. Fig.4 BER under 4 MCSs Consider multi-parameter adaptive WCS that switches between two subsystems utilizing QPSK and BPSK modulation combined with LDPC code (2016, 504). As is demonstrated clearly in Fig.4, while BER reaches the target value 10-4, SINR of the system with the QPSK modulation is not lower than -1.5dB. When SINR<-1.5dB, BER under QPSK modulation is higher than the target value 10-4. Then the system will switch to the BPSK modulation to ensure the BER is within the target scope. The BER curves in waterfall area of the two subsystems fit into straight lines described by the equations y(t)=-3.33x(t)-9 and y(t)=-2.4x(t)-14.8 respectively. Then the two linear state space equations of the subsystems are as follows: -1.5≤x1(t)≤2.3 (14) -4.5≤x2(t)≤-1.5 (15) Based on the stability control inference in Section 2.2, substitute the obtained system coefficient matrix into the formula (10) to construct the stability criteria, as a result, Xiis calculated as (16) (17) and the symmetric positive-definite matrices in the Lyapunov functions are further obtained: (18) (19) Therefore, the state feedback gains of the stability controller are k1=0.45, ki1=-0.21, kr1=0 (20) k2=260.12, ki2=-79.33, kr2=0 (21) Substitute the gain matrices obtained from Eq.(20) and Eq.(21) into Eq.(9) to get Li, so that Eq.(8) can be determined. By using the measure of four-order Runge Kutta method, the state and control input of each time can be solved. Then combine Eq.(14) and Eq.(15) to obtain BER of each time. The burst interference is shown in Fig.5. The burst interference at the time of 2s doesn’t alter the instant SINR interval, and therefore the system adjusts the transmission power only. At the time of 4s, the burst interference is so strong that the instant SINR interval is switched from one to another, which leads to the change of corresponding MCS. The curves of BER over time for different systems are shown in Fig.6. The analysis indicates that when the burst interference occurs, the BER of conventional power-controlled WCS will suddenly increase. And the maximum value can reach 0.5, which will be a serious influence on the stability of communication system that can even interrupt communication. The BER of conventional power-controlled WCS with state feedback control has a less significant increase, but there is an increase of transmission power. Compared with the above, the BER of the proposed multi-parameter adaptive WCS is always below the target value. Since the instant SINR changes its control interval from the QPSK (2016, 504) to BPSK (2016, 504), and the system switches and changes its BER characteristic. Subsequently, by using the state feedback controller, the system adjusts the transmission power so that the actual BER tunes along the direction of the target BER until the interference disappears. Then the system switches to the original MCS to ensure good transmission rate. The multi-parameter adaptive WCS only adjusts transmission power if the interference is too weak to make the system switch. Fig.5 The interference at time=2s and time=4s Fig.6 BER of different systems Fig.7 shows the ratio of time that meets the target BER to total switching time for three systems when the burst interference changes from 1dBm to 10dBm. It can be clearly seen that the multi-parameter adaptive WCS completely meet the requirements of target BER. Fig.7 The ratio of meeting the target BER for different systems Although the other two kinds of systems have fluctuations, in general, the ratio of conventional power-controlled WCS is about 40% and the ratio of conventional power-controlled WCS with state feedback control is about 50%. Therefore, the multi-parameter adaptive WCS which adopts the control rules proposed in this paper have better performance. As can be seen in Fig.8, the multi-parameter adaptive WCS switches between subsystems when the interference is strong. Although the transmission power increases, the highest transmission power is still lower than the other two systems, which reduces energy consumption and interference to other devices. Fig.8 The transmission power of different systems Fig.9 shows the changes of average transmission power increment when the burst interference value changes. It can be seen clearly that the average transmission power increment of the proposed system is the minimum. With the increase of the interference value, the differences between the proposed system and other conventional systems are enlarged. Fig.9 Average transmission power increment of different systems In this paper, the stability control of multi-parameter adaptive WCS, which can adaptively adjust the transmission power and the MCS through the feedback link , is studied. Firstly, the WCS is modeled as a linear switched system. Secondly, the state feedback controller with integral link is designed and a sufficient condition, which makes the switched system stable in the presence of burst interference, is given based on MLF method. Besides, the gain matrix of the controller and the system state equation can also be determined by the sufficient condition. Finally, the simulation results show that the multi-parameter adaptive WCS utilizing the sufficient condition has favorable performance. In terms of the stability of the BER, the proposed algorithm is better than the conventional power-controlled WCS with or without state feedback control. [ 1] Chen F Y. Automatic Control Principle. Beijing: National Defense Industry Press, 2010 [ 2] Tong T T, Song X Q, Niu Y T. Review of stability criteria for linear control systems. Shanxi Electronic Technology, 2013, 3: 88-90 (In Chinese) [ 3] Xiong J L, Lam J, Shu Z. Stability analysis of continuous-time switched systems with a random switching signal. IEEE Transactions on Automatic Control, 2014, 59(1): 180-186 [ 4] Lin H, Antsaklis P J. Stability and stabilizability of switched linear systems: A survey of recent results. IEEE Transactions on Automatic Control, 2005, 54(2): 308-322 [ 5] Phat V N, Ratchagit K. Stabilization of switched linear discrete-time systems with interval time-varying delay. Nonlinear Analysis: Hybrid Systems, 2011, 5(4): 605-612 [ 6] Fornasini E, Valcher M E. Stability and stabilizability criteria for discrete-time positive switched systems. IEEE Transactions on Automatic Control, 2012, 57(5): 1208-1221 [ 7] Sun J D, Jiang J P. Delay and data packet drop out separately related stability and state feedback stabilization of networked control systems. IET Control Theory and Applications, 2013, 7(3): 333-342 [ 8] Duan C, Wu F. Switching control synthesis for discrete-time switched linear systems via modified Lyapunov-Metzler inequalities. In: Proceedings of the 2012 American Control Conference, Montréal, Canada, 2012. 3186-3191 [ 9] Wang B, Zhang H B, Xie D H, et al. Brief paper: asynchronous stabilization of impulsive switched systems. IET Control Theory and Applications, 2013, 7(16): 2021-2027 [10] Huang C Z, Bai Y, Liu X J. H-infinity state feedback control for a class of networked cascade control systems with uncertain delay. IEEE Transaction on Industrial Informatics, 2010, 6(1): 62-72 [11] Yao H J, Dai X M, Yuan F S. Exponential stable control for a class of networked control systems with stochastic delays. Journal of Chemical and Pharmaceutical Research, 2013, 5(11): 32-38 [12] Rahmani B, Markazi A H D. Variable selective control method for networked control systems. IEEE Transactions on Control Systems Technology, 2013, 21(3): 975-982 [13] Menhour L, Koenig D, D’Andrea-Novel B. Continuous-time and discrete-time switched H∞ state feedback controllers: application for a robust steering vehicle control. In: Proceedings of the 2013 European Control Conference, Zürich, Switzerland, 2013. 986-991 [14] Tong T T, Song X Q, Niu Y T. Stability control of power adaptation in wireless communication system. In: Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC2013), Shenyang, China, 2013. 287-291 10.3772/j.issn.1006-6748.2017.04.005 ①Supported by the National Natural Science Foundation of China (No. 61572254, 61301103). ②To whom correspondence should be addressed. E-mail: echolily_dl@nuaa.edu.cn on Feb. 28, 2017* her Ph.D degree in School of Information Science and Engineering of Southeast University in 2007. She also received her B.S. and M.S. degrees from Southeast University in 1995 and 1998 respectively. She is now in the College of Electronic and Information Engineering, Nanjing University of Aeronautics and Astronautics. Her research interests mainly focus on cooperation communication and cognitive radio.
2 Principle of stability control algorithm
2.1 Design of the stability controller


2.2 Stability control rules and calculation methods





3 Numerical analysis and simulation results
4 Conclusions
杂志排行

High Technology Letters的其它文章
- Temperature field analysis of two rotating and squeezing steel-rubber rollers①
- Operation of the main steam inlet and outlet interface pipe of a nuclear power station①
- Studies on China graphene research based on the analysis of National Science and Technology Reports①
- First order sensitivity analysis of magnetorheological fluid damper based on the output damping force①
- Research on a toolpath generation method of NC milling based on space-filling curve①
- Novel differential evolution algorithm with spatial evolution rules①