膝上型假肢的运动意图识别与控制
2017-12-18宣伯凯刘作军陈玲玲
宣伯凯 刘作军,2 陈玲玲,2 杨 鹏,2
(1河北工业大学控制科学与工程学院, 天津 300130)(2河北工业大学智能康复装置与检测技术教育部工程研究中心, 天津 300130)
膝上型假肢的运动意图识别与控制
宣伯凯1刘作军1,2陈玲玲1,2杨 鹏1,2
(1河北工业大学控制科学与工程学院, 天津 300130)(2河北工业大学智能康复装置与检测技术教育部工程研究中心, 天津 300130)
根据不同路况条件和典型步速的笛卡尔积组合,利用装配在残肢侧的陀螺仪、加速度计和足底前后的压力传感器的信息,通过相关性系数分析、传感器融合、隐马尔可夫模型的方法,判断假肢使用者的运动意图.以健肢运动状态为参考值,利用迭代学习控制分别建立不同路况和步速情况下的控制知识数据库.通过传感器的关键状态变化信号驱动有限状态机状态转换,输出控制知识库中的控制量,实现假肢膝关节在不同路况、步速条件下对步态相位的控制.针对控制过程中出现的输出量实时偏差,采取了在线校正措施.对于有限状态机输出控制数据序列在时间同步上的超前和滞后问题,采取了相应的保持和补偿措施.结果表明,经隐马尔可夫模型处理后路况判断准确率可提升到91.7%,基于数据驱动的无模型控制方法能够实现对不同路况、步速下假肢步态的有效控制.
假肢;运动意图;迭代学习控制;有限状态机
下肢假肢具有辅助截肢者运动的重要作用,假肢的动作必须与使用者的运动意图相协调,因此假肢膝关节控制器的关键问题首先是使用者运动意图的识别问题.下肢运动意图的信息可通过使用非侵入式传感器测量表面肌电、足底接触力、关节运动角度和加速度等获得,也可以通过植入式电极检测外周神经、中枢神经信号而获得.在信号分析方面,文献[1-2]针对表面肌电信号使用QDA方法设计了膝关节屈伸动作的分类器;文献[3-4]针对表面肌电和足底压力信息分别使用了支持向量机和LDA方法完成运动模式的识别;文献[5]通过建立高斯混合模型实现了站-立-走3种运动模式的判断;文献[6]通过训练方法提高了运动模式转换的识别率.
与人体运动意图相协调是假肢膝关节控制的另一个关键问题.目前一般采用健肢步态还原步行姿态[7]、基于迭代学习实现假肢步速跟随[8]、通过CLMR建立映射函数输出运动状态[9]、自适应CPG控制器产生运动控制信息[10]、有限状态机实现膝关节的力矩控制[11],以及通过设计基于阻抗控制的有限状态机[12-13]实现假肢的主动运行.
伴随假肢控制原理研究的发展,假肢制作与控制技术的进步使假肢性能得到极大提升,但通过调节阻尼进行膝关节控制的被动型假肢,不能提供助力和主动调节.2009年,Ossur公司研制的Power Knee能够根据不同路况,控制致动器刺激使用者的残肢肌肉带动假肢同步运动,被认为是世界上第一款主动型膝上假肢.近年来,利用复杂传感器系统研制的智能仿生膝关节产品能够更灵敏地检测步态信息,提供更准确的运动模式和支撑力调节,代表产品有Otto Bock公司的Genium智能仿生膝关节、Ossur公司的Rheo Knee3仿生膝关节和Blatchford Endolite公司的Orion2智能仿生假肢等.国内智能假肢研制在近30年的发展中同样取得了长足的进步.清华大学率先展开了智能假肢相关理论与技术的研究,设计了利用肌电信号识别路况的多连杆智能假肢.许多科研团队在假肢控制领域的研究在不断扩展,设计了多款智能假肢原型样机.在智能假肢控制方案中,通过人体神经信号或表面肌电信号sEMG获取运动意图和膝关节控制量,具有直接反映人体行为变化规律、可实现多模式交互控制等优点.但神经信号难以直接测取,手术装配困难,而残肢sEMG信号则具有明显的个体特异性, 且会随着人的体征变化而变化,直接影响了动作识别的准确率[14].此外,表面电极在使用过程中因电极滑移松动、出汗、sEMG信号微弱易受干扰等问题,使采集到的信号具有很大随机性[15].受限于神经/机电系统之间信息交互上的技术瓶颈,出于安全性、成本等因素,在现阶段的可行性难以保证.与外骨骼和帕金森患者的康复辅具不同,通过表面肌电信号控制的假肢,还会因为不同截肢者肌肉残留和萎缩程度上的差异,其控制参数不具备通用性,假肢的安装、试穿、适应过程都会很长,增加了康复工程师的劳动强度.因此,本文利用惯性传感器和压力传感器检测运动状态信息,并通过相关性系数、传感器融合、隐马尔可夫模型的方法对运动意图实现了准确的预识别,同时采取基于迭代学习控制和有限状态机的方法对假肢进行控制.
1 假肢系统与控制方法
为提高假肢在不同路况和步速下的协调性与适应性,本文提出的膝上型假肢系统包括下肢运动意图识别与假肢膝关节控制策略2个部分,如图1所示.肢体健全的人能够依据路况自然地调整步态,对于假肢穿戴者,假肢关节运动应与穿戴者运动意图一致,执行协调的步态控制才能保障运动的平稳和舒适.健肢信息虽然能够比假肢信息更利于下肢运动的分析,但通过问卷调查,绝对多数的截肢者对在健肢侧安装传感器和引线表示“心理上不能接受”,因此将加速度传感器和陀螺仪装配在假肢接受腔上检测人体残肢的运动状态,并在足底前后2个区域安装压力传感器判断步态相位.

图1 假肢控制系统
为抑制人体行走过程的震动干扰,采用小波分析对传感器信号进行去噪.在对信号进行标定和归一化后,分别对加速度传感器和陀螺仪信号与标准运动状态的模板信号进行相关性分析,并进一步通过传感器融合、隐马尔可夫模型的方法提高路况判断的准确率.
在运动意图识别的基础上,根据不同路况和步速下膝关节的运动曲线,利用行走过程中膝关节运动的周期性和重复性特征,运用迭代学习控制方法,针对快速、中速、慢速3种类别步速,分别建立平地和上、下楼梯3种行走模式下的所需控制量经验知识库.设计有限状态机控制器,以运动参数信号作为触发条件控制状态转移,分步态相位调用知识库中控制量输出,同时采取必要的实时校正和补偿调节,驱动电机控制动力型假肢膝关节的摆动或者调节被动型假肢阻尼气缸的阀门开度,实现下肢假肢的协调控制.
2 运动意图识别
2.1 下肢运动信息采集
行走过程中,截肢者大腿残肢的运动信息是人体运动意图的直接体现,关节转动角度与肢体运动的加速度信息能够直接反映人体的运动意图,而假肢足底压力的变化则能够为步速以及相位识别提供依据.因此,本文采用陀螺仪、加速度传感器、压力传感器采集残肢侧的运动信息.
在信号采集过程中,由于肢体摆动、与地面的接触造成的震动和电磁噪声给信号带来了干扰,因此首先要对传感器数据进行滤波处理.针对行走运动的低频段特性,采用小波阈值法去噪,并对重构信号进行信号零校准.竖直加速度信号处理如图2所示.
2.2 步态相位与步速的识别
行走是一种周期运动,由连续的步态周期构成.通常,一个步态周期由支撑期和摆动期2个相位阶段构成.支撑期又可以进一步划分成支撑前期、中期和后期.将承重情况下的足底压力开关状态标记为1,则4个相位阶段可根据前脚掌与脚后跟的压力开关状态编码依次表示为01,11,10,00.
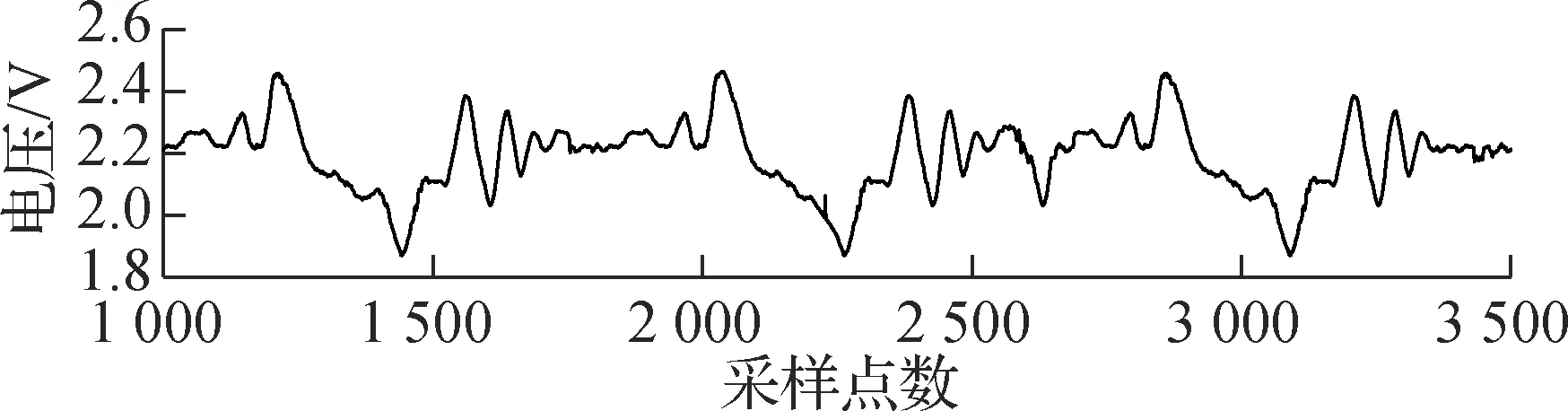
(a) 原始信号

(b) 重构信号
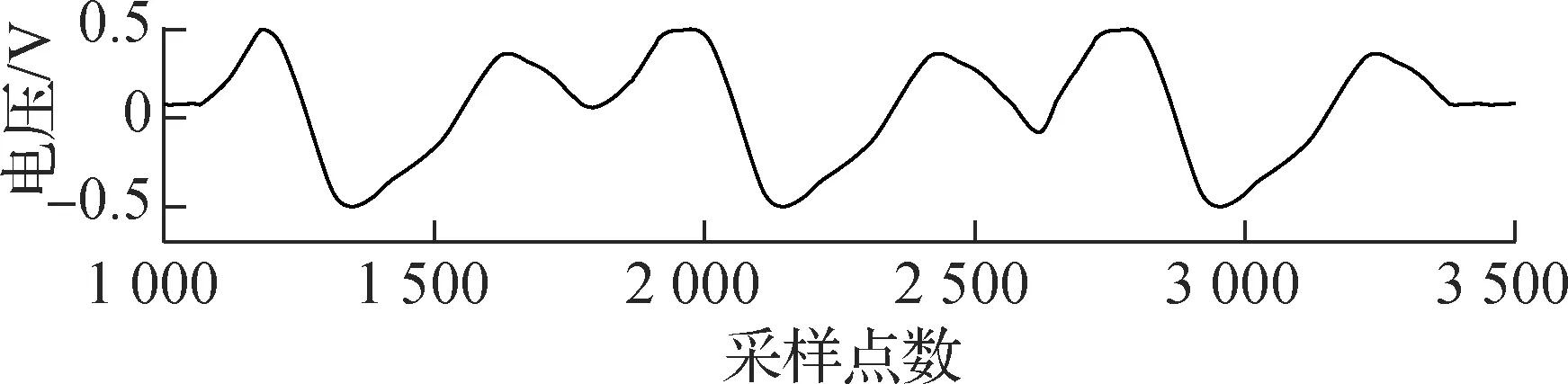
(c) 校准后信号
在支撑期,借助地面支撑力的作用,假肢穿戴者可通过增强残肢侧髋关节运动完成对假肢步态的相位控制.因此,可以利用假肢的足底压力信号作为支撑中期和后期开始与结束的判断信号.对于其他相位阶段的判断,患者穿戴下肢假肢行走,假肢的运动效果会影响膝下传感器信号的测量,而传感器信号状态的测量反过来又会影响对假肢运动的实际控制.为避免这种双向交互影响,对假肢穿戴者行走过程的相位划分,应该通过人体残肢的运动信息分析,才能反映出人体真实的主观运动意图.当残肢竖直方向加速度处于波谷时,支撑中期开始,如图3所示;当残肢水平方向加速度处于波谷时,支撑末期开始,如图4所示.利用这2个特征点的传感器信号,以及足底压力信号,可以判断出行走过程中的相位转换,并可用作膝关节控制中有限状态机状态变换的触发信号.
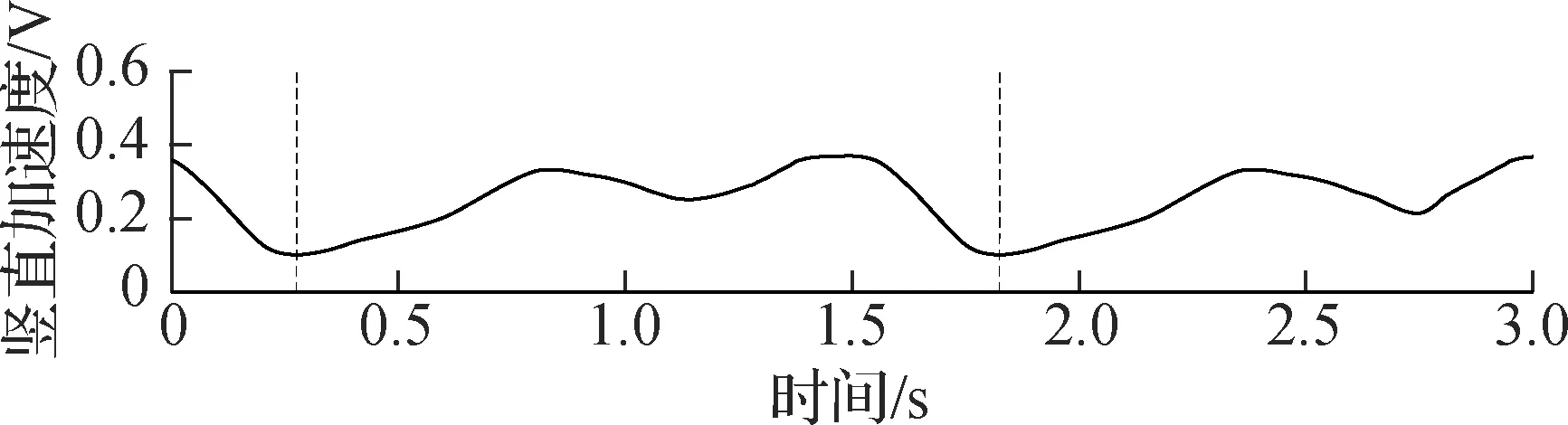
(a) 残肢竖直加速度

(b) 后足底压力信号特征

(c) 前足底压力信号特征

(a) 残肢水平加速度

(b) 后足底压力信号特征

(c) 前足底压力信号特征
在不同步速条件下,假肢完成各个步态相位所需要的时间并不相同.本文以支撑前期的时间作为步速的判断依据.根据实验测算,支撑前期的平均时间约占整个步态周期的10%左右,因此将支撑前期的时长除以比例系数,即可得到整个步态周期的时间.本文为简化系统的复杂性,根据测试者的行走习惯,将步速划分为慢速、中速和快速3个类别.对于中青年男性,慢速为大于1.6 s/步,中速为1.3 ~1.6 s/步之间,快速为小于1.3 s/步.
采用支撑前期的时长进行整个步态周期的步速判断,其目的在于提前实现对摆动期步速的预报,进而根据不同步速进行摆动期的膝关节控制,能够有效弥补假肢膝关节控制中的滞后问题.在支撑期,人体可利用残肢髋关节的力量和地面的支撑力来调控假肢膝关节的速度,而在摆动期,人体残肢对假肢膝关节的控制影响则大大下降,因此假肢膝关节控制器必须预知当前的步速,才能实现协调的运动状态控制.如果使用整个步态周期的信息进行运动状态的识别,这种识别是对历史运动状态的“事后报告”,将所得的判断结果用于下一步的运动状态控制,则只能在前后运动状态不变的情况下才会有效,一旦下一步的路况或步速发生变化,假肢的控制就会出现不协调的问题.
2.3 路况的识别
2.3.1 测试平台与传感器信号对比
本文针对平地行走、上楼梯和下楼梯3种典型路况进行识别,运动信息采集测试平台如图5所示.

(a) 上楼梯实验(b) 下楼梯实验
实验志愿者为2名膝上型假肢穿戴者,均为男性.志愿者1为33岁,截肢时间7年,身高1.67 m,体重58 kg,适配C-Leg假肢.志愿者2为37岁,截肢时间5年,身高1.73 m,体重62 kg,适配英中耐假肢.测试中,在实验平台上假肢穿戴者在平地上行走3步后过渡到上/下楼梯状态,走完6级台阶过渡到平地后再走行3步结束,共计12步,取中间10步的数据用于测试;此外,实验还包括平地连续行走7步的测试,取中间5步的数据用于测试.测试前,志愿者先在测试平台上进行了上下楼梯往复5次以上的适应性训练,实测过程中,每轮实验后均检查并重新固定传感器及其连线,每进行1轮实验,休息3 min以上.
下肢运动具有典型的周期重复性,在同一运动模式下传感器数据具有近似的曲线.将3种路况下残肢水平加速度、垂直加速度和角加速度数据进行周期归一化处理,得到测试者在适应测试平台后的一组典型传感器数据,如图6所示.由图可见,不同路况下曲线具有相同的变化规律.将对应每种路况的典型数据作为标准模板,与实时检测的数据进行相关性计算,通过对比即可判断路况.
2.3.2 模板库建立
在建立模板库时,运动意图用笛卡尔积描述为
D=SW
(1)
式中,S为步速集合,S={慢速,中速,快速};W为路况集合,W={平地,上楼梯,下楼梯};D为运动意图集合,D={(慢速,平地),(慢速,上楼梯),…}.
依据假肢运动过程中陀螺仪、水平方向加速度、垂直方向加速度的参数特征,得到9个模板曲线.在相关性计算时,为缩短判断时间,可根据上文中步速预识别的结果,仅与所对应步速下的3种路况的模板曲线进行对比.
2.3.3 相关性分析
通过计算2个变量之间的协方差和标准差的商求得相关系数,进而衡量分析2个变量间的相似程度.利用相关性分析可以判断实时步态数据与模板数据的近似程度,文献[16]在帕金森症患者下肢运动评估中取得了理想的效果.本文根据相关性分析识别假肢运动意图,相关系数计算如下:

(a) 水平加速度信号对比

(b) 竖直加速度信号对比

(c) 陀螺仪信号对比
Ci,j=
(2)
式中,X(t)为用于路况识别的加速度计和陀螺仪的实时数据;Y(t)为模板数据;i=1,2,3表示传感器信号;j=1,2,3表示路况.
在假肢的控制中,运动判断的实时性和准确性是一对矛盾参数.如果使用整个步态周期的全部数据与模板数据对比进行相关性计算,准确性虽然最高,但实时性最差,难以用于当前周期的实时控制.因此,在保证较高准确性的前提下,本文利用前半周期中尽量少的数据预判出实时路况用于当前步态周期的控制,以此弥补假肢关节中机电系统响应上的滞后,提高运动的协调性.通过对比发现,不同路况的水平加速度和垂直加速度信息在支撑前期差异明显,陀螺仪信号在支撑后期差异明显.采用在一个步态周期中进行2次路况判断,第1次在支撑前期利用水平和垂直加速度信息进行路况预判,以此作为残肢离地后摆动期的假肢膝关节控制的依据.第2次判断在支撑后期,利用陀螺仪信号和水平加速度信号进行路况判断,对第1次预判的结果进行校验和纠正,为后续步态控制提供参考.
本文在大量实验的基础上,确定采用500 Hz的采样频率.一个步态周期为1.30~1.60 s,采样点数为650~800,其中支撑期时长约为0.78~0.96 s,即390~480个采样点.选择一个步态周期从支撑前期开始及之后的300点数据进行相关性分析,完成路况的第1次预判,用于当前步态周期中的后续动作的控制.
利用2类传感器信号单独进行相关性分析时,由于对比数据量少于整个步态周期的一半,判断的结果存在明显的不足和差异.在测试中,从2位假肢穿戴者3种典型路况的数据中另选各30组进行了路况预报,分别来自于上/下楼梯实验各5次,每次包含中部6组上台阶和两端平地行走各2组数据;平地行走实验2次,每次10组数据.以上共包含上/下楼梯及平地行走数据各60组.预报的结果如表1、表2所示,以表1为例,60组下楼的测试数据中,有49组被正确识别,4组被识别为上楼,7组被识别为平地.2路信号预报的平均准确率均只有80%左右,需要通过传感器融合以获得更准确的预判.

表1 基于水平加速度相关系数的路况判断

表2 基于垂直加速度相关系数的路况判断
2.3.4 传感器融合
本文采用D-S证据理论[17]对3种单一传感器信息判断结果进行融合,识别框架包括3种路况信息和判断错误率.框架中每个元素的基本概率分配函数为各个相关系数与相关系数和的比值,即

(3)
各种路况判断的联合概率函数为
mcom(i)=maccl(i)⨁maccv(i)=

(4)
其中归一化常数K为
(5)
将联合概率函数最高值所对应的路况作为输出结果,得到融合后的判断结果如表3所示.
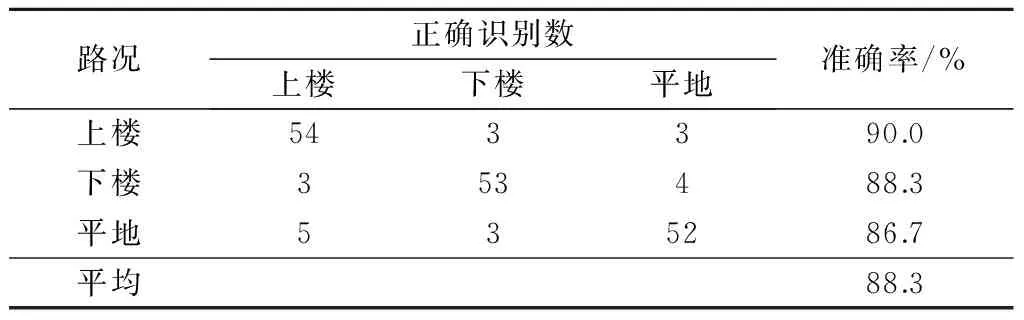
表3 传感器融合的路况判断
2.3.5 隐马尔可夫模型
传感器融合后的准确率虽然得到了一定提高,但仍有较大的提升空间.人体行走过程中前后两步之间的状态转换存在一定的受限性规律,如:楼梯的两端只能是平地,上楼梯后的下一步不会是下楼梯等.将行走过程的这种条件化特征融合在双重随机过程中,采用隐马尔可夫模型HMM[18]描述为
λ=[N,M,π,A,B]
(6)
式中,N为隐藏状态,表示下一步将要发生的路况;M为可观测向量,表示上一步已发生的路况,因为可使用整个步态周期的传感器数据进行判断,其准确率可提升到95.8%,为下一步路况预报的准确性打下了基础;π表示初始状态,通常默认为平地,即
π=[0,0,1]
(7)
描述前后两步路况转换的状态转移矩阵A表示为
(8)
矩阵A中的元素为3种路况之间状态转移的概率.观测样本概率矩阵B表示为

(9)
矩阵B中的元素为传感器融合后的准确率.
将A,B矩阵中的数据代入下式,即可预报得出下一步的路况状态:
δ1(i)=πibi,3
δt+1(i)=δt(j)aj,ibi,x
(10)
式中,a和b分别为矩阵A和B中的元素;x为观测值,来自于传感器融合后的最大值路况编号;δ1(i)为初始步态周期路况判断值;δt+1(i)为下一个步态周期判断值.每个周期的δt+1(i)中最大值所对应的路况即为当前步态摆动期中可能性最高的路况.需要注意的是,δt+1(i)中的数据是基于不足半个步态周期数据的预报值,存在较大的错误率,不能像普通HMM过程那样迭代进入下一个周期的运算.在下一个周期运算前,需要用基于整个步态周期数据的报告值进行替代,才能提高路况预识别的准确性.经HMM处理后的结果如表4所示,路况判断准确率由88.3%提升到了91.7 %.

表4 经HMM处理后的路况判断
3 基于ILC和FMS的假肢控制
根据步态周期性和重复性特点,采用笛卡尔积的方式,构造出不同路况和步速的知识库,通过迭代学习获取典型运动状态下的控制经验,输入到知识库.通过传感器驱动的有限状态机以前馈方式输出知识库中的经验数据.同时采取在线检测补偿的方式,灵活处理系统中出现的实时偏差.
3.1 基于迭代学习控制的知识库
迭代学习控制ILC应用于沿同一轨迹重复运行的系统,将系统误差以一定的学习律与控制量结合,产生作用于下一次操作的新控制量,重复进行操作,逐次提高控制精度.算法的典型形式为
un+1(k)=un(k)+g(en(k),k)
(11)
en(k)=yd(k)-yn(k)
(12)
式中,控制量un(k)为第k次迭代以前积累的控制经验;学习律g(en(k),k)为第k次迭代时用于修正控制经验un(k)的有效信息,由期望曲线和输出曲线的误差获得;un+1(k)为利用un(k)与g(en(k),k)得出的新控制经验.
下肢假肢具有典型的重复性运动特征,可采取图7方案,应用迭代学习控制方法建立控制知识库.首先,根据运动意图将假肢的基本运动分类,将同一类型的运动分组.同组动作具有相近的期望参数轨迹,设定偏差范围进行控制经验的学习.同一类型分组称为知识库前项.

图7 控制知识获取过程图
通过迭代学习完成每一个知识库前项控制经验的获取,学习过程如下:① 保持同一步速和路况,进行多步行走,根据式(12),以健肢的膝关节角度为期望值序列yd(k),求出yd(k)与对应的假肢膝关节角度值序列yn(k)的偏差量序列en(k);② 根据式(11),通过学习逐步修正控制量序列un+1(k).由于假肢系统是一种伪非线性系统,即其输出与输入具有单调性,但比例关系是变化的,因此在采用典型的P型ILC学习率时,学习增益应为控制量每变化一个最小调节单位时所对应产生的最大关节角度变化值的倒数.
在迭代学习过程中,计算一个步态周期的支撑前期起始点、支撑中期起始点、支撑末期起始点和摆动期起始点的关节角度的误差范数和,检测其是否满足如下条件:
∑‖en(k)‖≤eT=∑yd(k)θ%
(13)
如条件不满足,则继续学习;当误差满足停止条件时,将控制量序列un+1(k)写入知识库中.考虑到人体行走过程的随机性,学习偏差eT的指标通常设定为关节角度的10%左右.此外,考虑到动力型假肢能够提供助力,可设置eT小一些;而被动型假肢只能通过改变阻尼调节关节角度,其偏差无法从根本上消除,所以应设置eT适当大一些.
在知识库的建立过程中,还应根据康复工程师的临床经验,填写必要的控制知识,例如上述学习过程中停止条件所对应的角度差阈值、防跌倒的应急保护、打软腿时的锁死等.
以四连杆动力型假肢在慢速平地条件下的运动为例,其结构特征及迭代学习过程如图8和9所示.所使用的假肢膝关节由安装在下部的电机快速旋转推动主连杆伸缩运动,进而带动膝关节弯曲或伸直.主连杆的伸缩长度l与膝关节的角度θ之间,在运动范围内有如下的近似线性关系:
θ=2.188l
(14)
而主连杆的伸缩长度l与电机的转动角度同样是线性关系.因此,假肢膝关节的角度控制适用于迭代学习控制方法.

(a) 外形(b) 结构原理
(a) 第1次迭代(b) 第2次迭代

(c) 第3次迭代(d) 第4次迭代

(e) 第5次迭代(f) 第6次迭代
通过对9种意图下的下肢运动分别进行迭代学习,建立相应的规则知识库,在实际控制中将知识以前馈的方式直接输出.这种方式可以避免在实时反馈控制时执行器响应的滞后,有效解决假肢行走中慢半拍的不协调现象.为避免整个步态周期的控制量输出方式带来的误差累积问题,控制知识按一个步态周期的4个相位阶段分段存储在知识库中,控制系统可分4个相位阶段进行及时的偏差补偿.
假肢经过长时间使用后,由于机械部件磨损等原因,原有控制规则的效果会逐渐变差,当角度偏差连续多次超过设定阈值eT时,基于离线迭代学习控制建立的假肢控制知识库需要进行控制量的在线修正.通过重新进入迭代学习过程,获取新的控制经验.
3.2 传感器驱动的有限状态机控制
有限状态机FSM在假肢控制中被广泛应用,假肢FSM控制模型有5个组成部分:4种步态相位的状态集合Q、足底压力传感器和加速度计信号组成的输入符号集Σ、状态转移规则δ、初始状态q和接受状态F.状态转移规则包括:支撑前期向支撑中期转移的规则用水平加速度信号的极小值表示;支撑中期向支撑后期转移的规则用竖直加速度信号的极小值表示;支撑后期向摆动期转移的规则用前脚掌压力信号由1变为0表示;摆动期向支撑期转移的规则用后脚掌压力信号由0变为1表示.
结合预识别的路况和步速,有限状态机控制器依据输入的触发信号和当前状态,确定并转移到下一个状态,从知识库中检索出对应步态相位的控制量序列并完成输出控制.
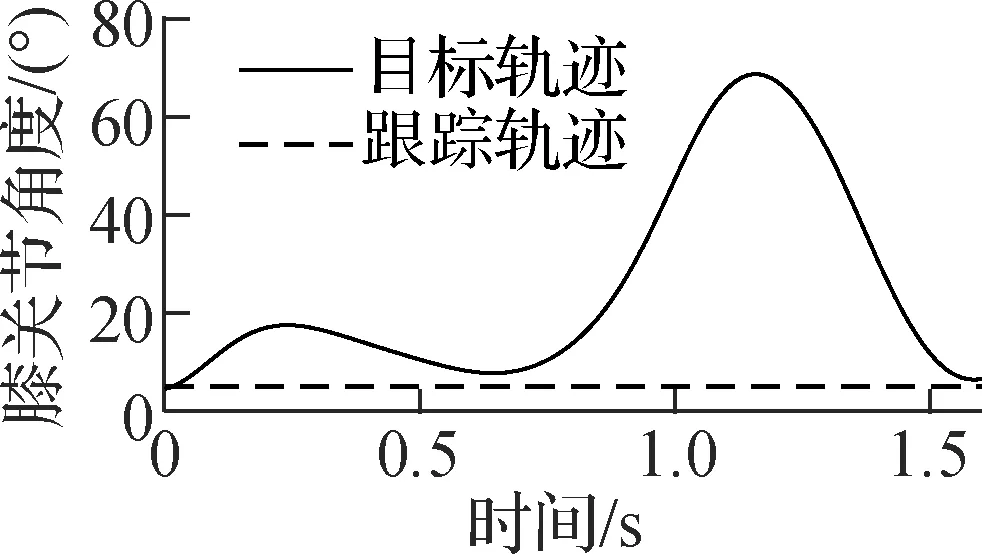
由于下肢运动速度的随机性,有限状态机控制器输出知识库中控制量序列时会出现以下2种情况:① 本相位阶段的数据序列已输出完毕,状态转移的传感器触发信号延后,此时膝关节已经达到了期望的角度值,需将控制量清零,保持膝关节角度至下一次状态转移,如图10(a)所示;② 本相位阶段的数据序列尚未输出完毕,状态转移的传感器触发信号提前,此时上一步态相位的控制并未完成,新步态相位起始时膝关节角度值并没有达到期望值,需要将上一相位没有输出完的控制量与新步态相位的控制量相加后输出,如图10(b)所示.

(a) 衔接延迟控制
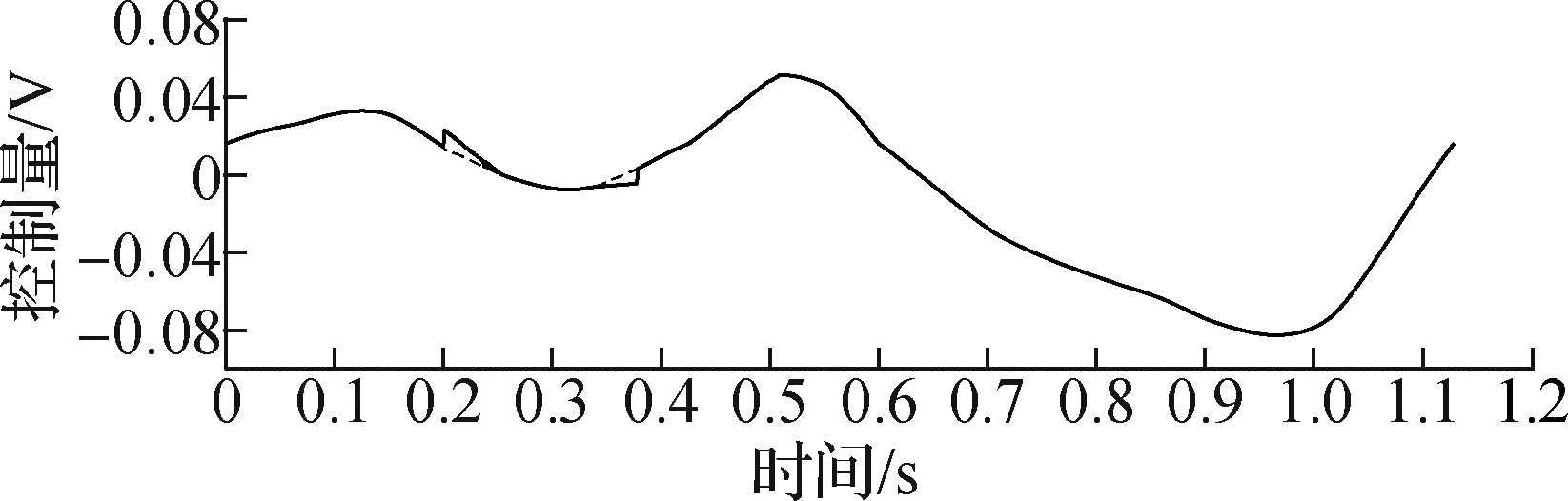
(b) 衔接超前控制
3.3 运动模式误报的校正控制
由于摆动期的运动模式是通过支撑期中300个数据推断预测得到的,存在预测不准的问题.对比图6中三路传感器信号可以发现,安装在大腿残肢端的陀螺仪在摆动期开始后会出现一个特征峰值,这个峰值在不同路况条件下,有明显的不同.根据此峰值的大小,就可以快速地判断出当前路况是否与预报路况相符.如果预报路况有误,则系统需要在摆动期的后期进行补偿校正,避免运动协调性的继续受损.此外,在上楼梯路况被误判为平地或下楼梯时,还需要紧急切换到防绊倒的保护控制模式.
4 系统实验
系统实验在双下肢假肢运动测试平台上进行,关节运动通过电机进行驱动.分别按平地及上、下楼梯3种路况,以慢、中、快每种典型步速各走1步,连续行走3步.系统根据不同的步速和路况状态,从知识库中检索并输出,通过迭代学习获得相应的控制量序列,控制测试平台的执行电机,实现对应运动意图的行走动作.不同路况条件下,连续改变步速进行运动控制的模拟实验如图11所示.
实验表明,本文方法控制的假肢能够有效识别路况和步速,实现下肢假肢的协调运动控制,证明了本文方法的有效性.
5 结论
1) 针对膝上型假肢运动意图的识别,使用加速度计、陀螺仪和足底压力传感器对下肢运动状态进行检测;利用传感器的特征信号实现了步态相位和步速的有效识别;利用相关性系数分析、D-S证据理论、隐马尔可夫模型的方法实现了对路况的识别.
2) 针对假肢膝关节执行器对协调性和响应速度的要求,依据步态周期相位的状态转移规律,通过迭代学习控制建立了3种典型路况在快、中、慢速运动时所需的相位控制知识数据库.
3) 设计了有限状态机控制器对知识库的控制知识进行调用并输出,通过模拟测试证实了该方法的有效性.
本文工作为今后假肢在上下坡、草地等其他路况以及拐弯、跨越等非标准运动的识别和控制奠定了基础.

(a) 平地行走运动模拟(b) 不同步速时的平地行走运动控制

(c) 上楼梯运动模拟(d) 不同步速时的上楼梯运动控制

(e) 下楼梯运动模拟(f) 不同步速时的下楼梯运动控制
[1] Huang H, Kuiken T A, Lipschutz R D. A strategy for identifying locomotion modes using surface electromyography[J].IEEETransBiomedEng, 2009,56(1): 65-73. DOI:10.1109/TBME.2008.2003293.
[2] Ha K H, Varol H A, Goldfarb M. Volitional control of a prosthetic knee using surface electromyography [J].IEEETransBiomedEng, 2011,58(1): 144-151. DOI:10.1109/TBME.2010.2070840.
[3] Huang H, Zhang F, Hargrove L J, et al. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion[J].IEEETransBiomedEng, 2011,58(10): 2867-2875. DOI:10.1109/TBME.2011.2161671.
[4] Du L, Zhang F, Liu M, et al. Toward design of an environment-aware adaptive locomotion mode recognition system[J].IEEETransBiomedEng, 2012,59(10): 2716-2725.
[5] Varol H A, Sup F, Goldfarb M. Multiclass real-time intent recognition of a powered lower limb prosthesis[J].IEEETransBiomedEng, 2010,57(3): 542-551. DOI:10.1109/TBME.2009.2034734.
[6] Young A J, Simon A M, Hargrove L J. A training method for locomotion mode prediction using powered lower limb prostheses[J].IEEETransNeuralSystRehabilEng, 2014,22(3): 671-677. DOI:10.1109/TNSRE.2013.2285101.
[7] Lawson B E, Varol H A, Huff A, et al. Control of stair ascent and descent with a powered transfemoral prosthesis[J].IEEETransNeuralSystRehabilEng, 2013,21(3): 466-473. DOI:10.1109/TNSRE.2012.2225640.
[8] 龚思远, 杨鹏, 宋亮, 等. 基于迭代学习控制智能下肢假肢研制:实现了对健肢步速的跟随[J]. 中国组织工程研究与临床康复, 2010, 14(13): 2295-2298. DOI:10.3969/j.issn.1673-8225.2010.13.005.
Gong Siyuan, Yang Peng, Song Liang, et al. Development of intelligent lower limb prostheses based on iterative learning control: A follow of normal walking speed[J].JournalofClinicalRehabilitativeTissueEngineeringResearch, 2010,14(13): 2295-2298. DOI:10.3969/j.issn.1673-8225.2010.13.005. (in Chinese)
[9] Vallery H, Burgkart R, Hartmann C, et al. Complementary limb motion estimation for the control of active knee prostheses[J].BiomedTech, 2011,56(1): 45-51. DOI:10.1515/BMT.2010.057.
[10] Ryu J K, Chong N Y, You B J, et al. Adaptive CPG based coordinated control of healthy and robotic lower limb movements[C]//The18thIEEEInternationalSymposiumonRobotandHumanInteractiveCommunication. Toyama, Japan, 2009:122-127.
[11] Chen G, Liu Z, Chen L, et al. Control of powered knee joint prosthesis based on finite-state machine[J].LectureNotesinElectricalEngineering, 2015,337: 395-403. DOI:10.1007/978-3-662-46463-2_40.
[12] Sup F, Bohara A, Goldfarb M. Design and control of a powered transfemoral prosthesis[J].IntJRobRes, 2008,27(2): 263-273. DOI:10.1177/0278364907084588.
[13] Lenzi T, Hargrove L, Sensinger J. Speed-adaptation mechanism: Robotic prostheses can actively regulate joint torque[J].IEEERobotics&AutomationMagazine, 2014,21(4): 94-107. DOI:10.1109/mra.2014.2360305.
[14] 丁其川, 熊安斌, 赵新刚, 等. 基于表面肌电的运动意图识别方法研究及应用综述[J]. 自动化学报, 2016,42(1): 13-25.
Ding Qichuan, Xiong Anbin, Zhao Xingang, et al. A review on researches and applications of sEMG-based motion intent recognition methods[J].ActaAutomaticaSinica, 2016,42(1): 13-25. (in Chinese)
[15] 胡进,侯增广,陈翼雄,等. 下肢康复机器人及其交互控制方法[J]. 自动化学报, 2014, 40(11): 2377-2389.
Hu Jin, Hou Zengguang, Chen Yixiong, et al. Lower limb rehabilitation robots and interactive control methods[J].ActaAutomaticaSinica, 2014,40(11): 2377-2389. (in Chinese)
[16] Sant’Anna A, Salarian A, Wickström N. A new measure of movement symmetry in early Parkinson’s disease patients using symbolic processing of inertial sensor data[J].IEEETransBiomedEng, 2011,58(7): 2127-2135. DOI:10.1109/TBME.2011.2149521.
[17] Arami A, Barre A, Berthelin R, et al. Estimation of prosthetic knee angles via data fusion of implantable and wearable sensors[C]//2013IEEEInternationalConferenceonBodySensorNetworks. Boston, USA, 2013: 1-6. DOI:10.1109/bsn.2013.6575473.
[18] 赵丽娜,刘作军,苟斌,等. 基于隐马尔可夫模型的动力型下肢假肢步态预识别[J]. 机器人, 2014, 36(3): 337-341.
Zhao Lina, Liu Zuojun, Gou Bin, et al. Gait recognition pre-judgment of dynamic lower limb prosthesis based on hidden Markov model[J].Robot, 2014,36(3): 337-341. DOI:10.3724/SP.J.1218.2014.00337. (in Chinese)
Motionintentionrecognitionandcontrolofabovekneeprosthesis
Xuan Bokai1Liu Zuojun1,2Chen Lingling1,2Yang Peng1,2
(1School of Control Science and Engineering, Hebei University of Technology, Tianjin 300130, China) (2Engineering Research Center of Intelligent Rehabilitation of Ministry of Education, Hebei University of Technology, Tianjin 300130, China)
According to the combination of different terrains and walking speeds in the way of Cartesian product, a motion intention recognizer for amputee was presented. The sensor system was composed of an accelerometer, a gyroscope mounted on the prosthetic socket, and two pressure sensors mounted under the sole. The motion intention was inferred by intra-class correlation coefficient, sensor fusion and hidden Markov model. And a flexible iterative learning control (ILC) was proposed to build an experience database for the control of knee joint in prosthesis. And the motion state of the healthy knee was set as the learning sample in ILC. Furthermore, the sensor signals of the state transition were used to drive a finite state machine (FSM). The control experience in the knowledge database was output to control the stride phase according to the terrain, and speed. Besides, an online correction was adopted to reduce the real-time errors in the output axis. Moreover, to regulate the output sequence lead and lag in time axis, an output holder and a compensator were used. The experimental results show that the accuracy of the terrain recognition using the hidden Markor model is improved by 91.7%. Thus, the model-free control method is effective for prosthesis gait control of prosthesis according to the terrain and speed.
prosthesis;motion intention;iterative learning control;finite state machine
10.3969/j.issn.1001-0505.2017.06.005
TP242
A
1001-0505(2017)06-1107-10
2017-06-30.
宣伯凯(1984—),男,博士生;杨鹏(联系人),男,博士,教授,博士生导师,yphebut@163.com.
国家自然科学基金资助项目(61703135,61773151)、河北省自然科学基金青年基金资助项目(F2016202327).
宣伯凯,刘作军,陈玲玲,等.膝上型假肢的运动意图识别与控制[J].东南大学学报(自然科学版),2017,47(6):1107-1116.
10.3969/j.issn.1001-0505.2017.06.005.
