电液双阀激振系统振幅增益特性实验研究
2017-12-18吴樟伟孟爱华
吴樟伟,倪 敬,孟爱华
(杭州电子科技大学机械工程学院,浙江 杭州 310018)
电液双阀激振系统振幅增益特性实验研究
吴樟伟,倪 敬,孟爱华
(杭州电子科技大学机械工程学院,浙江 杭州 310018)
电液伺服激振系统可为振动拉削工艺提供较大的激振力,其中双阀并联可通过补偿流量,在激振频率与激振振幅间取得平衡,但其振幅增益变化的不可预测性较大.针对上述问题,以双伺服阀并联为研究对象,采用阀缸一体式的电液双阀激振器进行激振实验,通过分析Matlab/Simulink仿真计算结果和实测结果,研究了电液双阀激振系统有效振幅增益变化的规律特性.多组交叉式实验及结果分析表明:双阀并联结构可以使通用电液激振系统的位移输出幅值范围得到显著提升.但该结构并非单阀系统的简单合并,由于激振过程中多通道汇流扰动作用的不断加剧,激振频率和阀芯开口量的变化量也随之增大,其有效位移输出增益在50%~70%之间浮动.
双阀并联;振幅增益;汇流扰动
0 引 言
振动辅助加工工艺是利用加工过程中切削刀具的振动来实现被加工工件的脉冲式切削过程[1],加工系统的整体稳定性、工件的加工精度、生产效率均可得到有效提高.目前,该工艺已在钻削、带锯切、剖断等技术领域得到应用[2].电液伺服激振系统具有高负载、大功率、宽振幅等特点[3],可通过激振器的振动为拉削系统提供较大激振力和有效振幅.采用双伺服阀并联的方式在一定程度上补偿了系统流量并以此拓宽系统的有效输出幅值范围[4].但双阀激振系统振幅增益特性的准确描述以及双阀激振系统在拉削工艺上的适用性还有待进一步研究.
针对电液激振系统的振动特性,许多学者采用实验和仿真相结合的方式及数值计算的方法研究了在不同实验工况下特定电液激振装置的振动特性.陈文颍等[5]为了弥补伺服阀在高频段频响的不足,提出了采用双缸多阀的电液振动系统设计方案,并对其进行了研究与优化.毛阳等[6]设计了一种由流量伺服阀和压力伺服阀组成的激振系统控制回路,合理采用了模糊控制及鲁棒控制并联方式,优化了并提高了高铁路基激振系统的动态性能.傅林坚等[7]通过并联多个高速开关阀来提高可控流量分辨率的方法,对大流量高响应电液比例阀进行了研究.丁媛媛等[8]为了实现2D转阀各项控制参数的独立控制,提出了并联转阀和滑阀的方案,建立了2D阀控缸电液激振系统模型;李伟荣等[9]设计出一种新型差动连接电液激振装置,并通过仿真与实验相结合的方式研究了该激振器运行过程中输出力、轴向开口量、激振频率等各项控制参数之间的关系;叶问军等[10]针对原2D阀存在的结构复杂、可控性差等问题,研制了一种新型2D高频激振阀;韩冬等[11]针对以往捣固装置具有冲击大、易磨损等不足,研制了采用电液激振技术的新型捣固装置;戎榕等[12]研制了一种钻削液压颤振器,并对其进行了实验研究.冯晓龙等[13]为了能够保证正常生产的情况下降低冷压机的吨位,提出了将电液颤振器与冷挤压加工工艺相结合的方法.但上述文献所涉及的研究主要是通过简单改变阀芯结构形状来不同程度地合并阀口面积,增大瞬时流量改善系统性能;或采用转阀作为实验研究对象,由于转阀受节流口特性所限,高频下单位时间输出流量衰减,致使系统产生的激振力小,位移波形不可控.目前,适用于拉削加工工艺的电液激振装置较少.为此,研制出一种适合振动拉削工艺的电液激振系统具有重要意义.另外,激振频率和激振输出幅值是电液激振系统的主要影响因素.因此,本文以电液双阀激振系统为研究对象,通过双阀并联激振系统仿真实验与激振实验相结合的方式,对其实际激振过程中的振幅增益特性进行了研究.
1 实验系统与实验方案
1.1 实验系统
为了研究双阀激振系统的振幅增益特性,本文搭建了如图1、图2所示的双阀激振拉削实验系统.系统主要由激振部分和拉削部分组成,包括机械部分,液压部分和电气部分.机械部分主要包括拉床床身、拉削主油缸安装座、导向柱、溜板、拉刀等.其中,拉床床身和拉削主油缸安装座作为拉削固定底座;导向柱和溜板之间是移动副,作为拉削的导向装置;拉刀作为拉削刀具.双阀激振装置固定安装在溜板上,拉刀固定在该激振装置的激振缸振动端,拉刀刀体底面与侧面与拉削导向套安装成一体,形成移动副.液压部分分别由拉削部分和双阀激振部分组成.以双阀激振部分为例,包括独立液压油源、液压油泵及油泵电机作为液压系统动力源;过滤器和精过滤器作为液压油的杂质去除部件,保证了液压油的清洁干净,保护系统的正常运作;伺服换向阀的A口和B口分别连接于激振缸的无杆腔和有杆腔;溢流阀保证液压油路的压力稳定;拉削主油缸作为拉削主运动的执行部件,各个液压控制元件和液压执行元件采用多条液压管路相连,液压控制元件同时与电气控制元件相连.电液双阀激振试验系统的工作原理及结构组成如图1所示,主要元件及参数如图2所示.

图1 电液双阀激振实验系统示意图
1.2 实验方案
电液双阀激振系统模型通过对Matlab/Simulink中计算模块调用的方式来选取与系统一致的相关参数,构建以负载压力为中间连接点的电液双阀激振仿真系统,研究电液双阀激振仿真系统的振幅增益特性.本实验主要分为2个部分.

图2 主要元件及参数示意图
表1 双阀激振系统主要参数

参数名称参数符号参数值阀电压位移增益/m3/(s·V)()Ksv0.1阀口面积梯度/mmw5.65阀流量系数Cd0.6阀频宽ωsv130阀阻尼系数/Hzδsv0.6阀时间常数/msT6.5阀死区-≈0系统压力/MPapp7液压油密度/(kg/m3)ρ900液压缸内径/mmA163活塞杆直径/mmA236液压缸行程/mmLs100非对称比例系数η0.673液压油容积模数/MPaβe700粘性阻尼系数/(N·s/m)Bp300摩擦力/NFf±200活塞总质量/kgm10
表2 实验激振参数
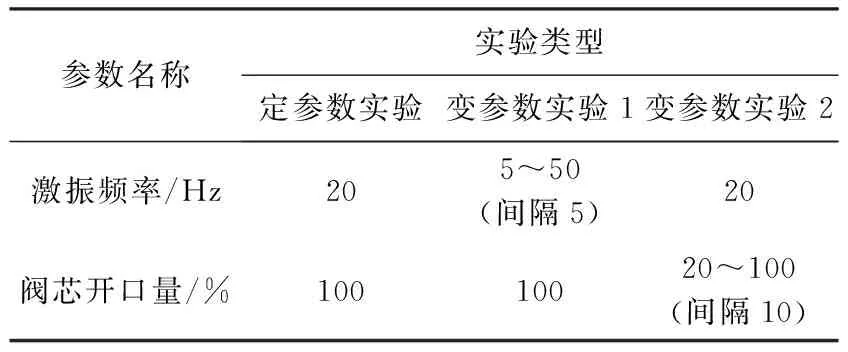
参数名称实验类型定参数实验变参数实验1变参数实验2激振频率/Hz205~50(间隔5)20阀芯开口量/%10010020~100(间隔10)
1)定激振参数实验:固定相关实验参数,即激振频率20 Hz,阀芯开口量100%.
U=umax×sin2πft
(1)
2)变激振参数实验:设计多组交叉式实验方案,即在9组由电压控制和10组由频率控制激励信号条件下,研究双阀激振系统交叉对比实验的输出振幅增益特性.仿真系统中的主要参数选取如表1、表2所示.在保持阀芯开口量100%的前提下,信号的正弦激励频率控制范围是5 Hz ~50 Hz;在保持正弦激励频率20 Hz的前提下,阀芯开口量的控制范围是20%~100%.
2 实验结果与分析
根据文献[4]所述,电液双阀激振系统模型如下:
(2)
式中,Ls为激振缸行程,η为非对称因子,η=A2/A1,
由文献[13]知,电压控制信号Ui与阀芯位移量xv i存在如下关系:

(3)
式中,ωsv为阀频宽,单位为Hz;Ksv为阀电压位移增益,单位为m3/(s·V);δsv为阀阻尼系数.
根据上述理论公式及实验方案进行实验,激振频率为20 Hz.对实验结果进行对比分析.图3和图4分别为定激振参数实验中的输出位移增益和负载流量增益结果.图3中,曲线s1为将2个单阀直接进行合并后的输出位移增益,即不考虑多个通道汇流扰动作用下的激振系统输出位移增益,曲线s2为考虑多个通道汇流扰动作用下的激振系统输出位移增益,曲线s3为偏差;图4中,曲线q1为将2个单阀直接进行合并后的负载流量增益,即不考虑多个通道汇流扰动作用下的激振系统负载流量增益,曲线q2为考虑多个通道汇流扰动作用下的激振系统负载流量增益.此外,变参数实验的激振系统输出幅值结果分别如图(5)—(8)所示,增益偏差可以理解为考虑或不考虑多个通道汇流扰动作用下的激振系统输出幅值偏差.经过多组交叉式激振实验,取得各组实验的均值.
2.1 定参数激振实验结果
定参数实验过程是将电液双阀激振系统模型与单阀系统模型在激励信号下的输出幅值特性进行比对,分析在多个通道汇流扰动作用下电液双阀激振系统的实际输出增益特性,实验结果分别如图3、图4所示.

图3 系统激振振幅仿真计算结果

图4 系统负载流量仿真计算结果
图3中,在不考虑多个通道汇流扰动作用的情况下,即直接将2个单阀系统进行合并,与假想中的振幅范围一致,其振幅增益变化在±1.00之间呈现出周期性;但在考虑多个通道汇流扰动作用的情况下,即如式(2)所示,其振幅增益变化在±0.55之间呈现出周期性.这种差异的存在表明:电液双阀激振系统模型相对于单阀激振系统模型的振幅增益可提升范围较小,两者之间差值约为45%.
图4中,对于直接的合并2个单阀系统来说,其负载流量增益变化也在±1.00之间呈现出周期性,且正向波峰与负向波谷之间的过渡较为平滑;而电液双阀激振系统模型的负载流量增益变化仅在-0.52~0.55之间呈现出周期性,且波形过渡不够平滑,正向波峰不够饱满.
2.2 变参数激振实验结果
随激振频率变化的增益偏差分布情况如图5、图6所示,其中仿真结果如图5所示,实测结果如图6所示.
图5中,增益偏差从负向波谷的0.35变化至正向波峰的0.48,说明振幅的可提升范围百分比从65%变化至52%.从图5(b)可以看出,增益偏差出现正向波峰的周期从激振频率为5 Hz时的0.45延迟至激振频率为50 Hz时的0.65.对比图6和图5可以看出,实验和仿真结果的分布趋势具有一定的吻合程度,图6中的增益偏差从负向波谷的0.32变化至正向波峰的0.45,说明振幅可提升范围百分比从68%变化至55%,其增益偏差正向波峰出现的周期存在滞后现象.不同之处在于仿真计算结果的分布起伏趋势较实测结果更加平顺.

图5 随激振频率变化的增益偏差分布仿真计算结果

图6 随激振频率变化的增益偏差分布实测结果
随阀芯开口量变化的增益偏差分布情况如图7、图8所示,其中仿真结果如图7所示,实测结果如图8所示.

图7 随阀芯开口量变化的增益偏差分布仿真计算结果

图8 随阀芯开口量变化的增益偏差分布实测结果
图7中,增益偏差从负向波谷的0.38变化至正向波峰的0.42,说明振幅可提升范围从62%变化至58%.从图7(b)可以看出,增益偏差出现正向波峰的周期从阀芯开口量为20%时的0.52延迟至阀芯开口量为100%时的0.43.其增益偏差正向波峰出现的周期存在提前现象,但仿真结果的分布起伏趋势与实测结果基本一致.不同之处在于,当阀芯开口量变化过半之后,增益偏差实测结果的分布具有上升趋势.
2.3 多通道汇流扰动对系统增益特性的影响
2.3.1 多通道汇流扰动对定激振参数下增益特性的影响
如图3所示,偏差曲线s3在0.000 s~0.025 s和0.025 s~0.050 s区间内存在较明显差异,即单个时间周期中的变化趋势较为明显,说明双阀激振缸活塞在往复运动过程中的振幅增益变化具有非一致性,进一步说明了在双阀激振缸多通道汇流扰动作用下,激振缸活塞的可提升振幅范围受到了限制.
产生受限可提升振幅范围的原因是双阀激振实验系统的流体负载特性,图4表明,q2在区间0.000 s~0.025 s和区间0.025 s~0.050 s内也存在同振幅增益特性类似的差异性变化趋势.由于在多通道汇流扰动作用下,各油腔内的流体始终保持能量守恒关系;不同的油腔之间存在体积上的差异,较小体积油腔更容易达到压力饱和点,从而使得激振缸各油腔的流体特性匹配产生不确定性,进而影响了双阀激振系统当中的流体负载特性,并表征为如图3中s2所示的振幅增益曲线.
2.3.2 多通道汇流扰动对变激振参数下增益特性的影响
图5和图6表明,在双阀激振缸多通道汇流扰动作用下,激振缸活塞的可提升振幅范围受到限制,而激振频率的增加会进一步显化这种现象.在实测中,在多通道汇流扰动作用下产生的差异性变化趋势更加突显.主要原因是受激振缸活塞往复运动过程中自身的摩擦阻尼特性、供油回路的泄漏等因素的影响.另外,滑阀阀口的频繁往复开合形成了瞬变的油压,激振缸缸体内部变化的油液体积速度低于滑阀阀芯的响应速度,并表征为其增益偏差正向波峰出现的周期较电压控制信号存在滞后现象.如图6(b)所示,在双阀激振缸多通道汇流扰动作用下,激振系统产生的瞬变液动力又推动了增益偏差正向波峰出现周期的前移.
图7和图8表明,在改变控制电压信号(即改变阀芯开口量)的情况下,双阀激振缸多通道汇流的扰动作用并不能有效限制激振缸活塞的可提升振幅范围.但当阀芯开口量变化过半之后,增益偏差实测结果的分布具有上升趋势.说明当阀芯开口量达到一定程度之后,激振缸缸体内部的油压逐渐趋于稳定.由滑阀的响应特性可知,其阀口的流量随阀芯的开口量递增,但在双阀激振缸多通道汇流的扰动作用下,缸体内部油压的稳定状态受到了影响.如图8(b)所示,其增益偏差正向波峰出现的周期也存在滞后现象.
仿真实验计算结果和实测结果表明:双阀激振缸多通道汇流扰动作用对激振系统增益特性产生的影响始终存在.在一定阀芯开口量条件下,多通道汇流扰动作用使得激振缸缸体内部油压随着滑阀阀芯的开合频率(即激振频率)的增加而逐渐趋于不稳定状态,导致正向波峰的二次重现;当在一定激振频率条件下逐级递增阀芯开口量时,系统的增益特性并没有在双阀激振缸多通道汇流扰动作用下发生改变,虽然其增益偏差正向波峰出现的周期存在滞后现象,但仿真计算结果的分布起伏趋势与实测结果基本一致且总体趋势较为平顺.
2.4 多通道汇流扰动对振动拉削系统的影响
根据电液双阀激振系统的振幅增益特性可知,受双伺服阀多通道汇流扰动作用的影响,相同工况下的振动拉削系统的振动速度2πfa并不能得到成倍增加.此外,基于激振系统在拉削系统上的应用,需要对激振频率与振幅之间的匹配关系进行进一步优化,保证激振速率高于拉削速率v[1].上述多组交叉式仿真计算结果和实测结果表明,振动速度的可提升范围为50%~70%.
3 结束语
本文针对双伺服阀EHES的振幅增益特性,以双阀激振系统为研究对象,得出双阀并联叠加的方式可以有效地提升常规电液激振系统振幅增益.但受流体多通道汇流耦合的影响,使得双阀并联激振所输出的振幅增益随激振频率和控制信号幅值变化,实际获得的振幅增益在50%~70%间浮动,这对振动拉削工艺合理的激振参数选择及优化方向具有重要意义.此外,由于振动拉削系统受拉削负载及非线性扰动等因素影响,实际拉削速度和拉削频率及阀芯开口量的关系还有待进一步研究.
[1] 李祥林.振动切削及其在机械加工中的应用[M].北京:北京科学技术出版社,1985:3-5.
[2] 曹凤国.超声加工[M].北京:化学工业出版社,2014:3-35.
[3] 朱文华.液压振动技术[M].福州:福建科学技术出版社,1984:5-20.
[4] Meng Z, Wu C Y, Ni J. Effect of sink flow on dual-valve electro-hydraulic excitation system[J]. Journal of Vibroengineering,2016,18(3):1563-1572.
[5] 陈文颍,宋琼,舒杨.同步性对“双缸多阀”电液振动台性能的影响[J].机床与液压,2013,41(4):83-85.
[6] 毛阳.高铁路基激振器电液伺服系统研究[D].武汉:武汉科技大学,2014.
[7] 傅林坚.大流量高响应电液比例阀的设计及关键技术研究[D].杭州:浙江大学,2010.
[8] 丁媛媛.多阀同步振动台解耦控制的研究[J].科技信息,2012(32):16-17.
[9] 李伟荣,阮健,任燕,等.2D阀控单出杆激振缸低频特性研究[J].中国机械工程,2014,25(1):97-102.
[10] 叶文军.2D高频激振阀的优化设计与实验研究[D].杭州:浙江工业大学,2012.
[11] 韩冬.电液激振高速换向技术[D].杭州:浙江大学,2014.
[11] 戎榕,邢彤,马宏杰,等.振动钻削过程中液压颤振器的振动特性分析[J].机械设计与研究,2015,31(1):111-113.
[12] 冯晓龙.高频液压激振在冷挤压中的应用研究[D].杭州:浙江工业大学,2013.
[13] 成大先.机械设计手册:单行本.液压传动.第5版[M].北京:化学工业出版社,2010:22-99.
ExperimentalStudyontheGainCharacteristicofAmplitudeinDual-valveElectro-hydraulicServoExcitationSystem
WU Zhangwei, NI Jing, MENG Aihua
(SchoolofMechanicalEngineering,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
The electro-hydraulic excitation system(EHES) has an ability to equip the vibration broaching with a greater exciting force. And the dual-valve system achieves equilibrium through flow compensation. Nevertheless, the large unpredictability of its amplitude gain could exist. For the questions above, as to the research object, the dual-valve vibration exciter is integrated by two servo-valves and single hydraulic cylinder and adopted into the excitation experiment. Comparing the numerical simulations analysed by MATLAB/Simulink software with the experimental results, the regularity of effective amplitude gain of EHES could be understood. Several groups of cross-experiments and analysis show that the adoption of doubling the servo-valves in EHES has a remarkable effect on the range expansion of gain characteristic of amplitude. However, this incorperative action of two valves is not the same as the simple superposition. On account of the aggravated multi-channel confluence disturbance, the excitation frequency and core opening could be increased in the meanwhile. And the effective displacement output gain is in the range of 50% and 70%.
dual-valve vibration exciter; gain characteristic of amplitude; confluence disturbance
10.13954/j.cnki.hdu.2017.06.010
2016-12-26
国家自然科学基金资助项目(51375129)
吴樟伟(1992-),男,浙江兰溪人,硕士研究生,金属带锯锯切技术.通信作者:倪敬教授,E-mail:nj2000@hdu.edu.cn.
TH137
A
1001-9146(2017)06-0048-07