基于双目视觉的舰载光电雨天对岸测距方法
2017-12-18王海川阚立杰
王 涛, 王海川, 阚立杰
(江苏自动化研究所, 江苏 连云港 222061)
基于双目视觉的舰载光电雨天对岸测距方法
王 涛, 王海川, 阚立杰
(江苏自动化研究所, 江苏 连云港 222061)
光电是舰上对岸常用跟踪方法,而雨天光电的激光测距功能受到干扰。针对该问题,研究基于双目视觉的测距方法,使用其无源特性,改进舰载光电跟踪系统。分析影响测距的因素,给出了距离的计算方法。在设定条件下,对测距精度进行了仿真,结果说明该方法有一定参考价值。
舰载光电; 激光测距; 光电双目测距
岛屿争端使国内外越来越关注舰艇对岸火力支援能力。由于雷达不易区分岸上目标和岸上背景,光电是对岸更有效的跟踪器。光电具有被动工作方式(激光测距仪除外),不受电磁干扰,低角跟踪,目标不易隐身,图像直观易于识别等优点,目前正成为替代或辅助雷达的最好方法之一[1]。舰载光电使用激光测距仪获取目标距离,测距时向目标发送高能光束,接收目标反射的光束,依据时间差计算目标距离。但激光在雨天会被空气中的水滴提前反射,测距功能受到干扰,而且激光接收设备有可能因反射能量过强而过载,甚至损坏。这使得舰载光电雨天无法准确获取目标距离信息,影响对岸作战使用。
为了解决光电激光测距受雨天等因素干扰问题,提高光电测距的抗干扰能力,研究了基于视觉深度的测距方法。相比激光测距,基于视觉深度的测距方法是无源的,受雨天空气中水滴反射折射等因素影响小,不会被对方激光预警设备探测到。视觉深度距离测量主要有双目立体视觉法[2]和共轴立体视觉法[3]。舰载光电的特点是长焦距,窄视场,常将目标置于视场中心,而共轴立体视觉法使用“斜视”的方法测距,不适用于这种应用情形,较原有的设计改动大。双目立体视觉测距在短焦距、宽视场的机器人视觉中被已广泛研究过,本文将双目立体视觉应用在长焦距、窄视场的舰载光电跟踪系统中,根据其特点,分析了影响测距的因素,给出了距离的计算方法。
1 光电双目测距原理
双目视觉测距是利用目标在相互平行放置的成像面成像位置差异,通过相似形原理计算出目标的距离。假定舰载光电的两个摄像机成像面高度一致且绝对平行,共用一个伺服。目标在左图像和右图像的投影分别为Pl和Pr。

图1 双目测距成像俯视图
图1是俯视图,左右摄像机光轴分别为OlYl和OrYr,摄像机间基线为B,摄像机焦距同为f,成像视差Xl-Xr。目标的坐标P(Xc,Yc,Zc)为目标在以左摄像机中心建立的摄像机坐标系下的坐标。通过三角相似形的原理易知:
(1)
目标P在左摄像机坐标系下的坐标为
(2)
在左摄像机中心建立瞄准线坐标系,设OaYa为跟踪瞄准线,OaXa为跟踪器俯仰轴,δq和δε为舷角和高低角跟踪偏差。目标在瞄准线坐标系内的坐标为(Xa,Ya,Za)[4]:
(3)
当光电稳定跟踪目标时,跟踪角误差均为小量,Ya近似等于斜距离D。
目标在左摄像机坐标系下的坐标和瞄准线坐标系下的坐标关系为
(4)
其中R为旋转矩阵,T为平移向量。当左摄像机坐标系与瞄准线坐标系重合时。由式(2)(3)(4)知, 视差Xl-Xr,基线B和焦距f是计算斜距离D的关键:
(5)
视差最小为一个像素单元UV时,能测的最大距离为

(6)
双目视觉系统的最大可测距离由式(6)约束。在实际应用中,舰载光电系统跟踪目标的距离受天气状况影响。在正确识别目标后用双目视觉法计算目标距离,若要求有较高的测距精度,最大测距距离会远小于式(6)中的极限值。
2 舰载光电测距系统和测距计算
由式(5)(6)知,双目视觉测距距离和基线B、焦距f成正比,和视差成反比。受短基线、短焦距、像素尺寸大等因素影响,双目视觉测距距离通常较短。随着图像传感器技术的进步,像素尺寸越来越小,使得视差越来越精确。而舰载光电可具有长焦距和长基线的特点,使中距离视觉测距成为可能。
以长基线、长焦距为前提设计舰载双目视觉测距系统。两个摄像机共用一个伺服,基线距离B取1m-2m,摄像机镜头视场为1°,因为是中距离探测,摄像机焦距取70mm-500mm,图像传感器像元大小取常见的6um×6um,像素数量取2048*1024。该系统最大视差为1023像素,设最小视差为10像素,根据式(5)计算出测距范围的理论值为:163m-16.7km。
图1的理想模型假定了两个摄像机光轴处于平行对准状态。当两摄像机光轴不处于平行状态时,如图2所示,需要进行图像旋转校正,再测距计算。
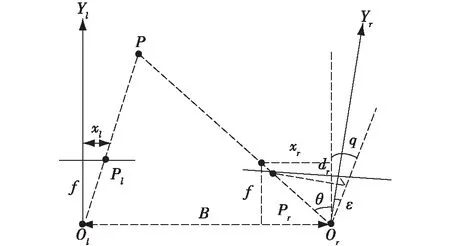
图2 光轴不平行时视觉测距
舰载光电跟踪好目标后,通过控制伺服将目标约束在图像中心。先在左摄像机图像中心水平方向搜索目标一个特征点P1,再在右图像搜索对应点Pr。假定使用线性摄像机模型,那么O1P1P共线,O1P1P即左摄像机的视线。假定右摄像机光心Or和O1P1PY1共面,右摄像机相对于左摄像机的光轴方向角偏差为q和高低角偏差为ε,dr为Pr到成像中心Or的径向距离。由投影关系和余弦定量易知,右摄像机视线OrPrP和光轴O1Y1的夹角为
(7)
根据式(5),距离测算公式修正为

(8)
式中两摄像机的光轴方向角偏差q,高低角偏差ε,基线B,摄像机焦距f和像素尺寸可由双摄像机标定确定[5]。
如果摄像机成像非线性,需考虑镜头对光线影响。假定镜头成像时只有径向误差,即成像点畸变程度只与径向距离有关,且离成像中心越近畸变越小。式(8)中在使用X1和dr时要考虑非线性误差的影响。
δ(dr)=k1(dr)+k2(dr)2
(9)
式(9)是一种二阶非线性误差模型,其一阶径向误差的参数k1和二阶径向误差的参数k2也由摄像机标定获得[6]。
式(8)即舰载光电双目测距计算方法,式中对两摄像机成像平面的旋转和成像模型的非线性做了一定修正。
3 影响舰载光电测距精度因素仿真分析
基于图2的双目视觉测距方法,影响测距的因素主要有:左右摄像机特征点的匹配误差;摄像机成像畸变的径向误差δd;右摄像机相对于左摄像机的光轴方向角偏差q和高低角偏差ε的标定误差;基线距离B标定误差δB和摄像机焦距f的标定误差δf。
对于一个已设计好的舰载双目视觉系统,双目摄像机标定误差会对式(8)的计算有影响,且测距误差和距离成比例放大。但这些误差是系统误差,可以通过校正给予补偿[7]。例如在可视的距离内,每百米距离上都可以测量出对应的视差值Xl-Xr,利用测量的视差对式(8)中参数再修正。修正后的参数符合当前的双目视觉系统,此时测距的误差主要受左右摄像机目标特征点匹配误差影响。
本文以Matlab2012为仿真环境,式(8)为测距计算方法对舰载光电测距计算进行仿真,设定左右摄像机特征点匹配误差均值小于一个像素,匹配误差以像素为单位,像元大小为6um×6um,基线距离为2m, 拍照时成像焦距为350mm,对0到15km内的测距精度进行仿真。

图3 距离0到15km内测距系统误差
图3中距离越远测距系统误差越大,受视差的匹配误差以像素为单位离散化影响,测距误差呈扇形发散。
当其他条件不变,摄像机间基线距离由0.5m变化到5.5m时,对5km的目标进行测距,测距误差如图4所示。

图4 基线对测距系统误差的影响
当其他条件不变,观察目标时,焦距由30mm变化到930mm时,对5km的目标进行测距,测距系统误差如图5所示。

图5 摄像机成像焦距对测距系统误差的影响
当其他条件不变,摄像机像素尺寸由1um到7um变化时,对5km的目标进行测距,测距系统误差如图6所示。
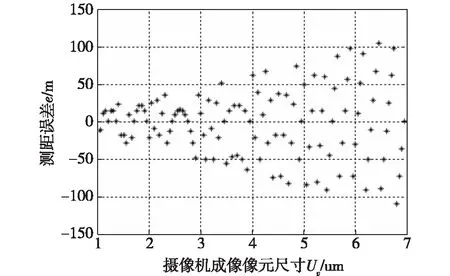
图6 摄像机成像像素尺寸对测距系统误差的影响
当其他条件不变,假定光电双目测距系统对每百米距离的视差值进行过实际测量并修正。左右摄像机光轴偏差的标定误差由-0.2°变化到0.2°时,对5km的目标进行测距,测距误差如图7所示。

图7 摄像机光轴偏差标定误差对测距系统误差的影响
当其他条件不变,右摄像机焦距标定误差由-2mm变化到2mm时,对5km的目标进行测距,相比原有测距误差,测距误差增量如图8所示。

图8 焦距标定误差对测距系统误差的影响
当其他条件不变,摄像机基线标定误差由-1cm变化到1cm时,对5km的目标进行测距,相比原有测距误差,测距误差增量如图9所示。
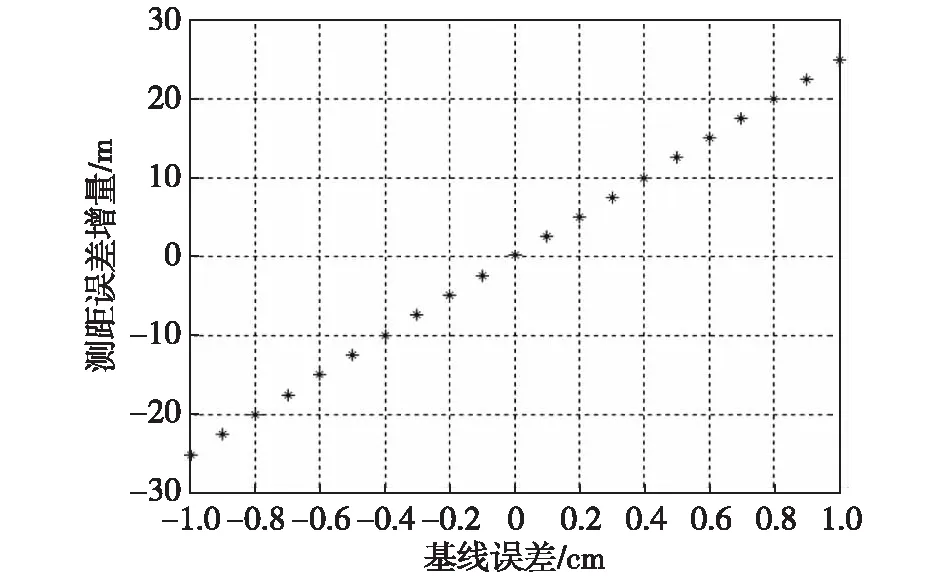
图9 基线标定误差对测距系统误差的影响
在仿真条件下,从图3可看出,以式(8)为测距计算方法,光电双目视觉测距法可以测量300m至5km岸上目标的距离,且测距系统误差小于100m。
从图4、图5和图6可看出,增加基线长度,使用长焦距的摄像机镜头,缩小成像单元尺寸都可以提高测距精度。
从图7可看出,在光电双目测距系统对每百米距离的视差值进行实际测量并修正后,左右摄像机光轴偏差的标定误差减小并不能提升测距精度。
从图8、图9可看出,焦距标定误差和基线标定误差绝对值的缩小有利于提高系统测距精度。
上述仿真结果表明,舰载光电双目视觉测距方法能较精确地测量5km以内目标的距离。该方法可以辅助激光测距,提高舰载光电雨天测距的抗干扰能力,为目标运动要素计算提供准确的距离数据。随着图像传感器技术和摄像机标定技术的进步,光学成像镜头的发展,该系统还有进一步提高测距精度和增加测距距离的可能。
4 结束语
本文基于舰载光电亟须解决的雨天测距抗干扰问题,探讨了双目视觉测距技术在舰载光电中使用的可行性,给出了目标距离的计算方法,并对测距精度和影响测距精度的因素进行了仿真分析。结果说明,在原有舰载光电的基础上只增加一个摄像机,就可使舰载光电具备无源探测中距离目标距离的能力,并有一定精度,从而改善舰载光电雨天无法准确获取岸上目标距离的情况。
[1] 嵇成新.我国光电火控系统亟待解决的问题[J].火力与指挥控制,2002,27(1):1-4.
[2] 罗桂娥.双目立体视觉深度感知与三维重建若干问题研究[D].长沙:中南大学,2012.
[3] 熊斓晖.共轴立体视觉深度测量[D].南京:南京大学,2012.
[4] 潘冠华.舰艇综合指挥控制系统原理[M].西安:西北工业大学出版社,2010.
[5] 毛剑飞,邹细勇,诸静.改进的平面模板两步法标定摄像机[J].中国图像图形学报(A辑), 2004,9(7):846-852.
[6] G Q Wei and S D Ma. Implicit and explicit camera calibration: theory and experiment. IEEE Trans[J]. Pattern Recognition and Machine Intelligence, 1994,16(5):469-480.
[7] 赵勋杰,李成金.双目立体实时测距系统的关键技术研究[J].激光与红外,2006,36(9):874-877.
A Shipborne Optical-Electronic Shore Targets Ranging MethodUsing Binocular Vision on Rainy Day
WANG Tao, WANG Hai-chuan, KAN Li-jie
(Jiangsu Automation Research Institute, Lianyungang 222061, China)
Optical-electronic is a common shipborne method to track shore targets, however, the rain influence its laser ranging. In order to solve this problem, a shipborne optical-electronic system is improved basing on binocular vision, using its passive characteristics. Factors affecting ranging are analyzed and distance calculation method is given in this paper. Under the conditions of setting, the ranging accuracy is simulated, the results show that the method has some reference value.
shipborne optical-electronic; lasor ranging; Optical-Eletroic binocular lision ranging
1673-3819(2017)06-0109-04
TN209;E917
A
10.3969/j.issn.1673-3819.2017.06.023
2017-07-05
2017-07-11
王 涛(1986-),男,江苏连云港人,硕士,工程师,研究方向为火控技术。王海川(1964-),男,研究员。阚立杰(1979-),男,高级工程师。