基于云计算技术的苹果采摘机器人系统
2017-12-16石建华
石建华
(武汉职业技术学院 电信学院,武汉 430074)
基于云计算技术的苹果采摘机器人系统
石建华
(武汉职业技术学院 电信学院,武汉 430074)
近年来,我国水果产业迎来快速发展期,苹果种植面积日益扩大,年产量明显增加,促使我国成为世界上最大的水果生产国家。水果进行种植过程中,成熟的水果采摘操作时必须消耗大量的时间和劳动力。由于进城务工人员日益增多,农村劳动力人口不断减少,此时劳动力成本有一定程度的增长,果农日常经营的成本也有所增加,因此智能采摘机器人顺势而生。为此,针对水果采摘机械研究的不足之处,提出了基于云计算的苹果采摘机器人系统,在机器人处于作业状态下设计了苹果采摘机器人软、硬件设计情况。为验证苹果采摘机器人的采摘效果,在果园中对其采摘性能展开试验,试验结果表明:所设计的采摘机器人运用视觉技术,能很好地克服气候环境等因素的影响,采摘作业中性能稳定,采摘效率高,值得在苹果生产地推广使用。
云计算技术;苹果机器人采摘系统;硬件;软件设计
0 引言
我国作为世界上最大的水果产地,水果也成为国内主要的经济作物。现阶段,水果发展成为继粮食、蔬菜之后第三大农作物,在国民经济发展中占有重要位置。我国对水果采摘机械化发展尤为重视,采摘机器人的应用对水果产业的发展产生直接的影响。苹果采摘机器人是针对苹果设计,可完成其采摘、输送、装箱等作业的装备,是一种具有感知能力的自动化机械收获系统。水果自动采摘机器人作业对象为有机生物,其实施采摘作业时受作业环境、对象等因素的影响,而运用机器人视觉技术,能有效提升采摘作业效率和精度。因此,设计苹果采摘机器人必须解决识别和定位目标果实的问题,在不损害果实和植株的基础上,遵循一定的标准完成苹果采摘工作;同时,也要综合考虑其他因素的影响,要确保其成本不比所替代的人工成本高,有效提升苹果采摘效率。本文根据各地苹果生产种植和具体采摘情况,在云计算技术基础上对苹果采摘情况展开试验研究,设计出智能化的苹果采摘机器人样机,以期减轻劳动人员工作量、提升苹果采摘效率。
1 苹果采摘机器人总体设计方案
进入21世纪,世界各国面临严重的人口老龄化问题,农业劳动力逐渐向其他各领域和行业转移,劳动力不仅具有成本高的特点,也不易找到充足的劳动力。果蔬采摘是其生产过程中最耗费时间、人力的环节,加之,采摘人员时常要弯腰或利用梯子登高,水果采摘成为劳动强度大、消耗时间长的作业模式。苹果是我国11大优势产品之一,近年来,我国对世界上苹果贡献率越来越高,如果一直采用人工采摘实在无法满足其发展需求。因此,研发苹果采摘机器人不仅能减轻劳动者工作强度,也能提高苹果采摘效率,从而拥有广阔的应用前景和发展空间。为满足形式各样的苹果园地面环境要求,本研究的机器人主要由机械结构和电气智能控制等部件组合而成:机械结构主要包括机械手臂、末端执行器及可移动载体等装置;电气智能控制系统包含微控制器、运动控制卡、数据采集卡及电动机驱动等部分,结构如图1所示。
苹果采摘机器人配备的机械结构部分,有利于机器人准确判断已经成熟的果实,并为准确摘取操作打下良好的基础。机器人配置的其它部件的功能有一定的差异,各配件相互结合共同完成苹果自动采摘操作。
可移动载体作为苹果采摘机器人最基本的部件,也是其它采集系统的主要平台,且执行信号采集及智能控制等均要借助移动载体完成。可移动载体使用腹带行走的方式,这种移动载体与地面接触面、受力面积较大,极易在松软的路面进行操作。机器人机械手臂使用多关节机械手臂,设计3个主自由度,能够实现转动、移动等操作。同时,自动采摘机器人配置的机械手臂具有韧性强、灵活性高等优点,便于及时到达所指定的位置,在整个采摘操作中稳定运行。夹持器作为采摘苹果过程中发挥最大作用的部件,苹果整个收获操作完全依靠夹持器完成。本次设计的夹持器最大工作角度为88°,采摘闭合时间设定为2s;设计的装置极为简便,采摘耗费时间短、力度适中,不会对目标水果带来不良的影响。

1.系统控制仓 2.红外对管 3.电源仓 4.移动载体
2 苹果采摘机器人硬件、软件设计
采摘机器人硬件系统主要由采摘机械臂、果实识别定位及可移动平台等模块组成,因此主要介绍苹果采摘机器人进行采摘作业时的软硬件部分设计情况。
2.1 采摘机器人硬件设计
2.1.1 设计视觉定位系统
视觉定位系统主要由计算机、图像采集卡及CCD摄像机等部分组成。该系统所用的双目摄像头固定在支架上,为机械手提供准确的目标定位。选用我国大恒公司生产的双通道彩色视频采集卡,对苹果这类水果进行视觉识别及定位研究,其定位流程如图2所示。
2.1.2 末端执行器
苹果采摘机器人执行采摘作业时,由末端执行器与苹果相接触,因苹果园采摘环境比较复杂,末端执行器的设计一直被认为农业类机器人的主要技术之一。苹果采摘系统末端执行机构如图3所示。这个末端执行器要求通过对苹果果梗的夹持,在不损伤果实的基础上成功采摘苹果。
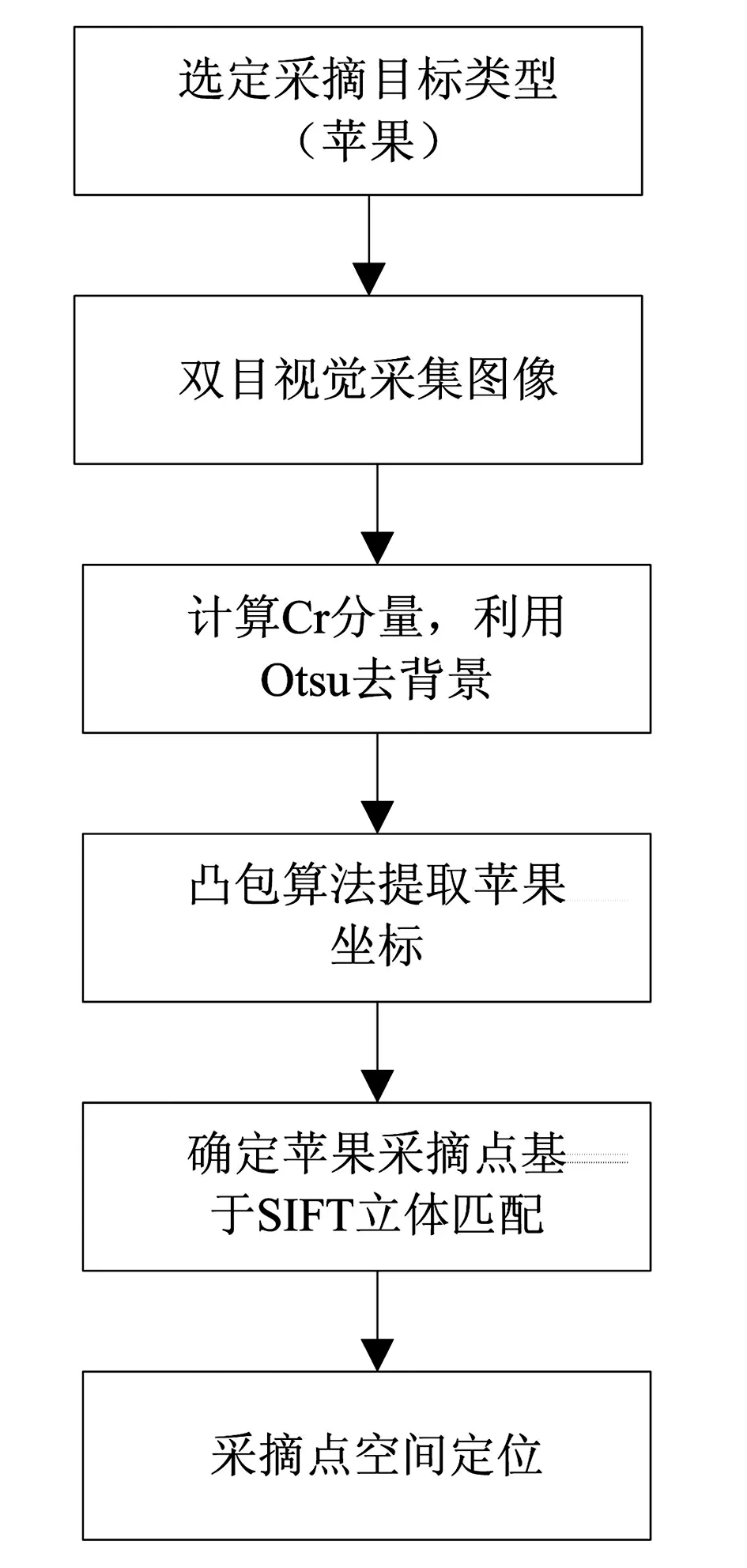
图2 苹果采摘机器人视觉识别定位流程图

1.直流电机 2.蜗轮蜗杆机构 3.钢丝软管传动 4.刀架与刀片
2.1.3 设计合理的能源箱
依据机器人系统不同元件的供电参数要求,本设计采用220V交流电源控制不同关节伺服电动机及计算机供电。同时,选取24V直流电源对末端执行器电动机进行供电。在机器人上安装的视觉摄像头所需能源由计算机端口进行供应,通过测算,整个采摘机器人系统总能耗量约为1.5kW。
2.2 采摘机器人系统软件设计
苹果采摘机器人采用开环式控制结构,建立基于云计算技术的评估采摘控制系统,整个系统基于Windows XP平台上完成操作,采用RS232总线与运动控制器实现通信。因控制系统对使用者具有全开放性,因此可在平台上对机器人实施操作和在线调试,利用不同控制算法和图像处理算法,促使其满足苹果采摘要求。为方便操作,设计了图形化的用户界面,用户可在界面上调整摄像机及伺服驱动器等参数,也可实时监控电动机具体运行情况。
在计算机上调用MatLab图像处理软件,并运用运动控制板和位控板组成的运动模块,完成图像的采集、分析、处理等操作。运动控制器作为机器人完成采摘要求的核心部件,其控制结构如图4所示。
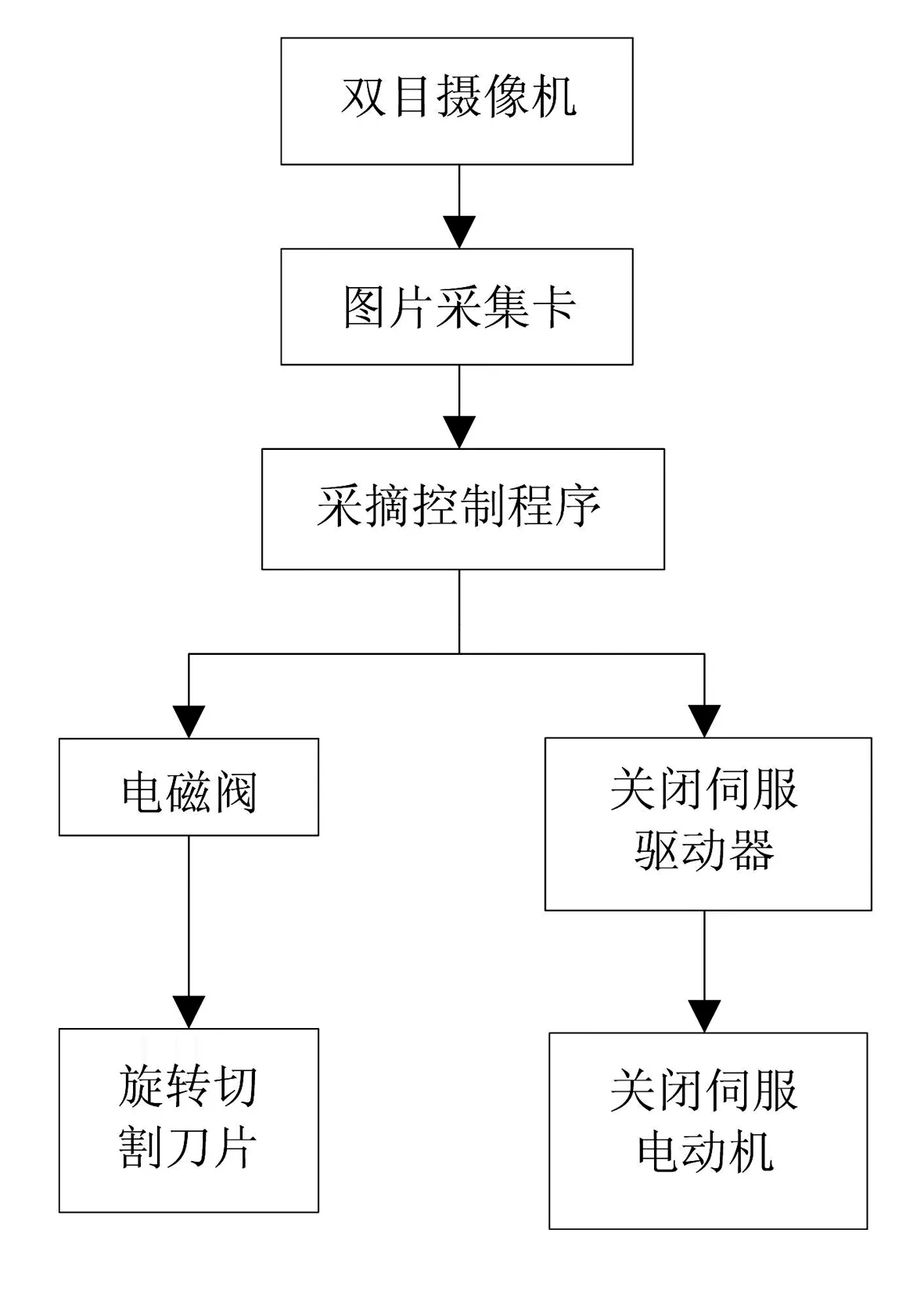
图4 苹果采摘机器人系统控制结构简图
3 识别定位目标果实
采摘机器人开展采摘操作时,先要准确判定采摘果实是否处于成熟状态及其三维位置,识别目标果实的成熟率对采摘效率产生直接的影响。具体采摘操作时,机器人配备的夹持器采用手环抱状的采摘方法,夹持器根据目标果实具体定位进行采摘。图像视觉技术运用两个摄像机从不同角度监拍果实的图像,并由图像采集卡将所采集的信息发送到工控计算机内,借助工控计算机制作目标果实的三维图像;根据已经形成的三维图像,机器人能够准确判断苹果的大小、形状等信息,从而更好地实施采摘作业。
对苹果进行正确采摘时,先要对其进行正确的分割识别,确保采摘机器人能够代替劳动力完成采摘操作。识别首要任务是准确采集苹果样本,运用摄像机完成整个拍摄操作。同时,依据图像信息建立相应的苹果样本及颜色模型,通过分割及时对果实与其附近生长的环境进行分离,采用三原色RGS进行对比计算,准确判定将要采摘的苹果是否成熟。苹果采摘作业中所用三原色RGB颜色模型如图5所示。

图5 三原色RGB颜色模型简图
本文以苹果为研究对象,介绍采摘机器人利用自动阈值分割法对苹果执行切割识别操作。一般情况下,生长成熟的苹果为红色,这种颜色与其附近的生长环境具有明显区别的是颜色。这时,利用三原色RGB准确对目标果实执行切割操作;同时,可以根据苹果的具体颜色,借助图像处理模块对比PC机数据库内已成熟果实的颜色样本,从而判定目标果实成熟度。
4 试验
2014年9月23-29日在我国某水果产地进行苹果采摘试验,试验情况比较理想。室外试验过程中,并无大面积遮挡目标、果实处于静止无晃动状态等。苹果采摘试验过程如下:针对果园中的苹果,先实施图像采集操作,视觉系统依据机器视觉算法求得目标物的三维坐标;同时,针对多个目标把其计算的空间坐标值存储在数据库内,控制系统分别从数据库内读取坐标值,完成机械采摘作业。根据表1数据可知:不论是晴天、夜晚或者是阴天,采摘机器人都可以自由控制并完成移动操作,进一步落实采摘作业。通过试验数据发现,苹果采摘机器人在不同天气环境下成功率均在85%以上,单一目标果实需要的采摘时间在10s以内,进一步证明所设计的采摘机器人具有极高的采摘效率,极易在苹果采摘作业中推广使用。
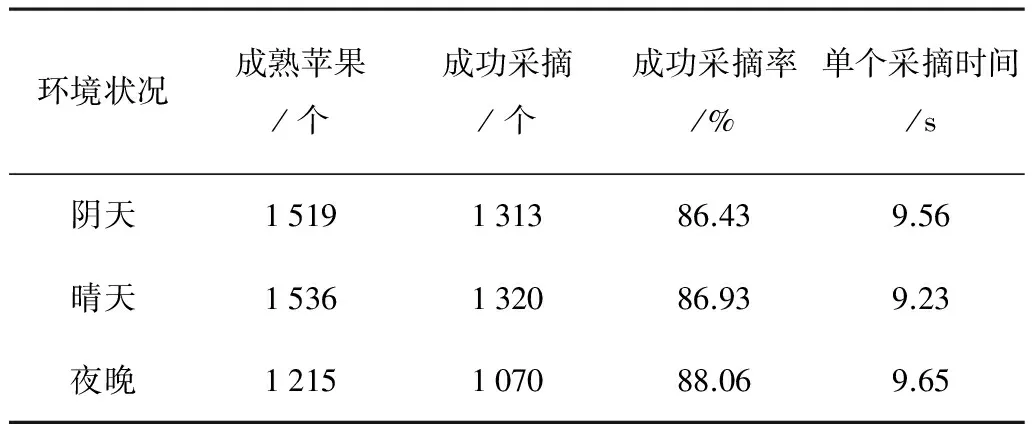
表1 苹果采摘机器人具体采摘情况
5 结论
根据果农对成熟苹果提出的采摘要求,设计了云计算技术基础上的苹果采摘机器人。这种机器人将视觉技术与自动化技术合理结合,具有操作简单、运行效率高等优点,在采摘作业中能轻松躲避障碍物,从而提升苹果采摘效率。根据我国部分地区苹果采摘作业量大、劳动力资源不足等特点,对智能化的苹果采摘机器人的软硬件设备进行设计。试验结果表明:本次设计的苹果采摘机器人识别果实速度快,不管何种天气状态摘取果实效率高,能够满足农业采摘操作中机械智能化、自动化等要求,具有非常广阔的发展空间。
[1] 薛亮,樊卫国,汪小志,等.基于RBF网络的果蔬采摘机器人运动轨迹控制研究[J].农机化研究,2016,38(9):229-233.
[2] 谈英,顾宝兴,姬长英,等.基于颜色和重量特征的苹果在线分级系统设计[J].计算机工程与应用,2016,11(2):219-222.
[3] 张杰,姬长英,顾宝兴,等.三自由度苹果采摘机器人本体设计[J].计算机工程与应用,2015,51(23):251-257.
[4] 熊俊涛,叶敏,邹湘军,等.多类型水果采摘机器人系统设计与性能分析[J].农业机械学报,2013,44(z1):230-235.
[5] 石雪强,程新文.苹果采摘机器人视觉系统的目标提取研究[J].农机化研究,2013,35(10):46-48,59.
[6] 朱霞,陈仁文,夏桦康,等.智能机器人水果采摘识别系统设计[J].计算机应用研究,2014,31(9):2711-2714.
[7] 孙承庭,胡平.智能移动式水果采摘机器人设计—基于机器视觉技术[J].农机化研究,2016,38(8):179-183.
[8] 孙承庭,胡平.嵌入式采摘机器人视觉测量与避障控 制系统研究[J].农机化研究,2016,38(11):219-223.
[9] 姬伟,李俊乐,杨俊,等.机器手采摘苹果抓取损伤机理有限元分析及验证[J].农业工程学报,2015,15(5):17-22.
Apple Based on Cloud Computing Technology Design Picking Robot System
Shi Jianhua
(College of Telecommunication, Wuhan Polytechnic College, Wuhan 430074,China)
In recent years, China's fruit industry usher in rapid development, increasing the apple planting area, the annual output has been increased significantly, to become the world's largest fruit producing countries. To grow in the process of fruit, ripe fruit picking operation must consume a lot of time and labor. Because more and more rural migrant workers, rural Labour force shrinking labor costs at this time have a certain degree of growth, fruit daily operation cost also increased. Development based on the above background, the intelligent picking robot conveniently, aimed at the deficiency of fruit harvest machinery research, apple picking robot system based on cloud computing design is put forward, in the robot under a state of operation about apple picking robot software and hardware design. To test and verify the picking of apple picking robot effect, in the orchard to pick performance test, the test results show that the designed picking robot using visual technology, can overcome the influence of environmental factors such as climate, picking performance is stable in operation, picking efficiency is high, is worth popularizing in apple production use.
cloud computing technology; apple picking robot system; hardware; the software design
2016-08-09
湖北省教育厅中青年人才项目(Q20151504)
石建华 (1971-),男,湖北鄂州人,副教授,硕士,(E-mail)shijianhua0611@163.com。
S225.93
A
1003-188X(2017)07-0180-04
