基于ZigBee网络和机械臂的智能灌溉系统设计
2017-12-16赵艳阳惠延波阳雨妍
王 莉,赵艳阳,惠延波,阳雨妍,陈 振
(1.河南工业大学 电气工程学院,郑州 450001;2.南京理工大学 机械工程学院,南京 210094)
基于ZigBee网络和机械臂的智能灌溉系统设计
王 莉1,赵艳阳1,惠延波1,阳雨妍2,陈 振1
(1.河南工业大学 电气工程学院,郑州 450001;2.南京理工大学 机械工程学院,南京 210094)
为了解决偏远及地势复杂地区的自动灌溉控制问题,设计实现了一套嵌入式自动化节水灌溉系统。以STM32嵌入式控制器为核心,采用无线ZigBee网络技术采集室外环境参数,通过上位机监测被测区域的温湿度变化,控制执行机构实现监测环境的温湿度控制调节。中央控制器与上位机采用E31-TTL-50无线通信,采用窄带无线方式进行数据传输,实现了机械臂智能灌溉、上位机远程监控系统查询、设置参数及实时监测等功能要求。
灌溉系统;机械臂;ZigBee网络;模糊控制
0 引言
我国不仅是农业大国而且还是一个相对资源紧缺的人口大国,科技发展也受区域限制,尤其是西北地区、西南地区、华中地区等农副产品的主要产地。每年我国用于农业生产用水量高达生活用水量的75%,仅仅用于农业灌溉的用水量大约占90%,所以提高我国农业水资源利用率,实现最好的生产效益和经济效益,已经成为我国节水的主要措施。随着科技的发展,计算机技术、自动化技术以及智能机器人技术已经深入到人们生产生活的各个领域,我国已经开始对智能定位节水灌溉的自动化技术的研究[1],并取得了显著成果;但大部分研究只是针对大棚或者温室等特定的环境,加之我国受经济、技术、地区等限制,大部分技术得不到推广。本设计实现了一个分布式控制技术、智能机器人技术、传感器技术、嵌入式系统技术以及ZigBee网络技术[2]等相结合并利用上位机进行自动控制、监测的智能定位节水灌溉系统,并且机械臂洒水模块使用灵活方便,灌溉角度可达360°,臂展可以伸缩。该系统不仅控制方便而且成本低,能够实现农户的较远距离的监测,实用性强,易于普及推广,能够解决偏远地区灌溉困难问题。
1 灌溉系统的总体设计
灌溉系统总体设计结构如图1所示。该系统主要包括嵌入式中央控制器模块、机械臂洒水模块、无线ZigBee技术网络[3]、传感器监测模块及人机交互界面等。
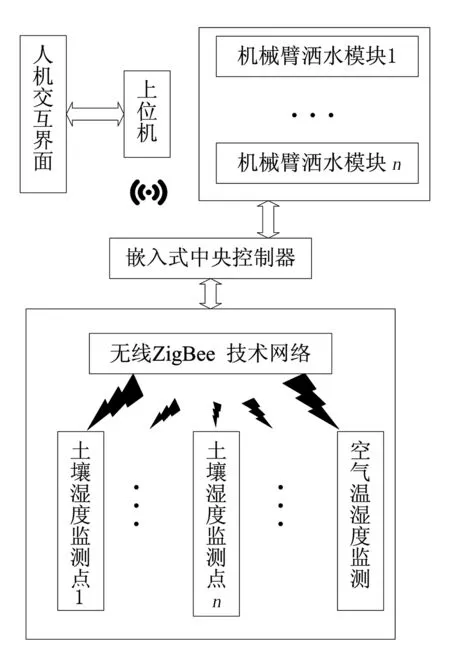
图1 系统总体设计结构图
在地势复杂的农田中使用分布式控制技术将传感器模块用合适的放置方式安置在检测区域,检测到的环境数据及土壤数据通过ZigBee网络路由器节点由协调器传送给MCU。嵌入式中央控制器能够实现对每一个分布点的传感器采集到的环境数据及土壤湿度数据进行单通道的分析处理及显示等[4]。如果检测到某检测区域环境温湿度或者土壤湿度低于预先设定的阈值,根据土壤湿度传感器使用手册对该区域的数据进行算法处理得到距离、需水量及灌溉喷头的灌溉范围等命令数据[5];中央控制器将会对该区域的洒水系统发送命令数据,机械臂洒水模块接受到中央控制器发送过来的数据命令,对该监测区域进行有效的喷灌[6]。
2 硬件设计
2.1 机械臂洒水模块
随着科技的发展,机器人技术越来越多地被应用于各个领域,灵活多变的机械操作,受到了各个领域的喜爱。本文主要采用两个大扭度可控旋转的数字防水舵机和电磁阀设计出一个三自由度的机械手臂喷灌模块,机械臂的臂展采用收缩的方式进行延伸和缩短,增大灌溉面积。该机械臂模块空载电流小于500mA,工作电压稳定在4.8~7.2V,具有优良的可塑性,如图2所示。
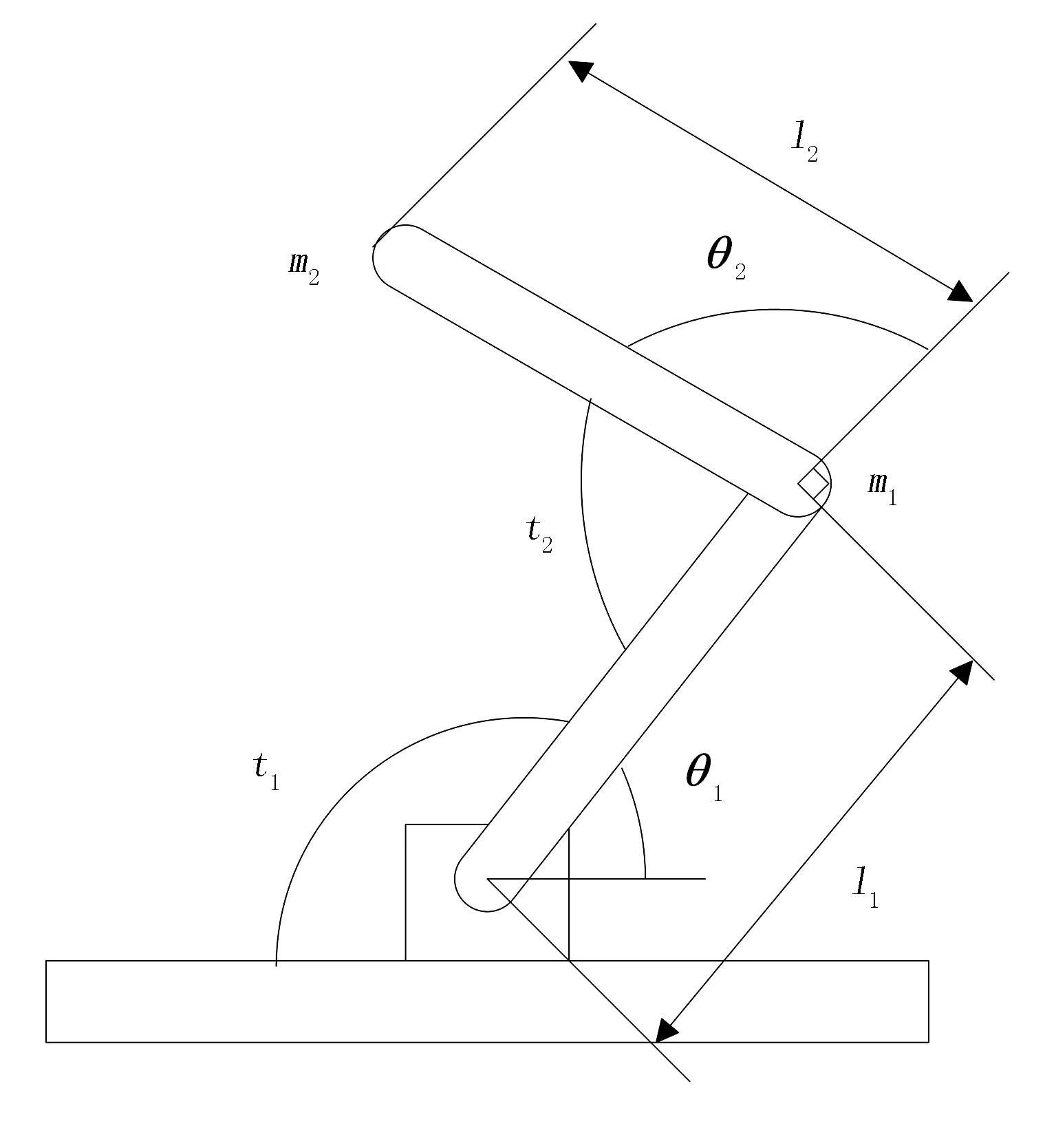
图2 机械手臂简化结构图
舵机机械手臂的控制问题是使各个关节能够以理想的动态性能无静差地跟踪期望轨迹。依据图2所示机械手臂的简化结构图,机械手的数学模型为

2.2 无线ZigBee技术网络
ZigBee网络在启用时首先要对各节点进行初始化,各节点之间的通信受Z-Strack通讯协议栈约束[7],如图3所示。ZigBee网络配置中有3种类型的节点、ZigBee协调点,ZigBee路由节点和ZigBee终端节点。其中,ZigBee协调点在无线传感网络中也叫做汇聚节点,一个ZigBee网络只有一个ZigBee协调点;ZigBee路由节点可以参与路由发现、消息转发,通过连接别的节点来扩展网络的覆盖范围等;ZigBee终端节点可以通过ZigBee协调点或者ZigBee路由节点连接到网络,但不允许其他人和节点通过它加入网络,ZigBee终端节点能够以非常低的功率运行。
无线ZigBee网络组网拓扑结构很灵活,共有3种基本组网结构,分别是Star Network、Mesh-Tree Network、Mesh Network,如图3所示。为了实现ZigBee网络对大面积监测区域的均匀覆盖且保证数据采集的效率,本系统采用了由一个协调器节点、多个路由和探测传感器节点构成的Mesh-Tree Network网络结构。终端节点采集到的数据信息利用通过ZigBee路由节点连入网络,从而实现和协调器的网络通信,进行传感器和中央MCU之间的信息交换。
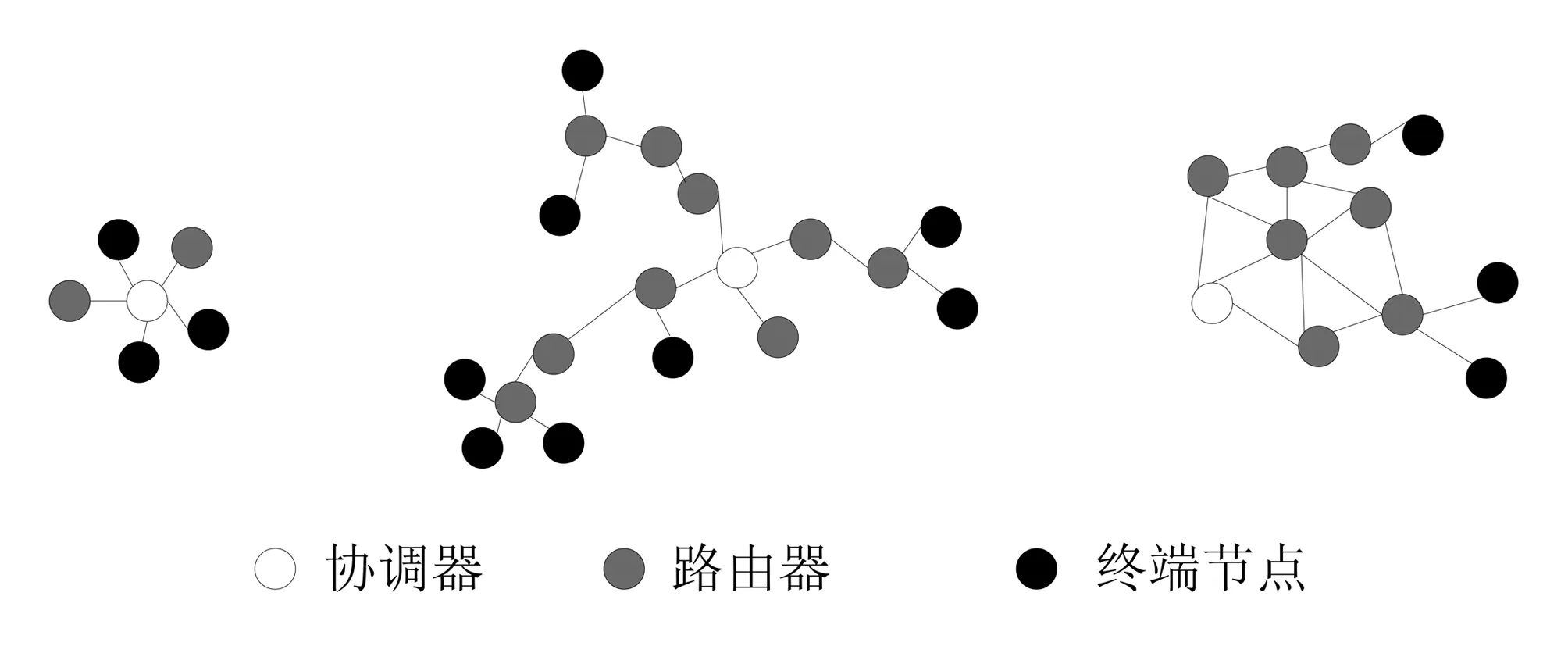
图3 ZigBee网络拓扑结构
本系统的终端节点有两种[8]:一种是程分布式结构的土壤湿度传感器[9],另一种是空气温湿度传感器。两种终端节点的通信都是通过串口实现,然后通过ZigBee无线通信技术将采集到的环境信息通过路由器将这些信息遵循局域网协议进行封装,封装成目标地址+目标信道+数据的格式[10],进行两次中继,最终送达到协调器;协调器对信息解码,只把数据部分传送给MCU。图4为本系统的ZigBee网络拓扑结构。
2.3 无线上位机的设计
为了便于农户快速和熟练地操作该平台,上位机主要采用人机交互界面和无线通信模块组成的无线控制系统,能使农户随时勘察、随时控制。内部模块化程序用C语言编写,屏幕显示的信息包括当前空气温度、当前空气湿度、机械臂控制显示、土壤湿度查询、手动设置界面及对话框等。农户可在操作间对外部农作物的生长态势进行监测,也可对外部监测区域定量设置喷灌。
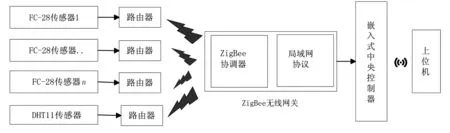
图4 系统的ZigBee网络拓扑结构
无线屏幕控制器模块采用基于AX5043射频芯片的E31-TTL-50作为无线通信的核心,该芯片内置CP2102控制器,通信距离可达2100m。图5为E31与MCU应用连接,它的通信串口直接与中央控制器MCU相连,数据收发采用窄带无线接入方式,工作模式有4种,包括透传模式、唤醒模式、省电模式和休眠模式,可通过引脚M0、M1拉高置低进行切换。该模块不仅传输距离远,而且具有很强的数据加密和压缩功能,能够提高传输速率、减少干扰概率,提高信息无线传输的可靠性。
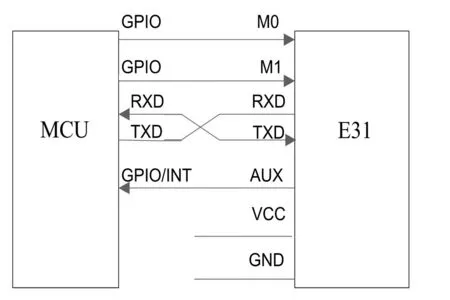
图5 E31与MCU连接的应用图
2.4 信号采集
对环境监测信号的采集包括两部分:土壤湿度信号和空气温湿度信号,土壤湿度信号采集采用的是带有灵敏度调节电位器四线制FC-28,具有数字量与模拟量双输出模式。该模块中集成有电位器,可通过电位器对土壤湿度的阈值进行调节,也可以通过软件补偿的方式对该功能进行控制。模块内的比较器是具有强稳定性的LM393,集成有电源指示灯和数字量开关指示灯,工作电压在3.3~5V之间。空气的温湿度采集利用的是低功耗的DHT11,湿度测量范围误差小,温度测量范围在0~50℃,有精准的数字量输出功能,可直接与控制器的IO口交互信息,适用于本设计的要求。该温湿度传感器的串口发送数据的格式为5位16进制数据,具体为:温度高8位+温度低8位+湿度高8位+湿度低8位+校验8位。
图6所示为传感器与CC2530模块的通信连接。通过CC2530的两个IO口模拟I2C传输协议与土壤湿度传感器或空气温湿度传感器进行通信,该信息由CC2530传输到ZigBee网络中,最终被送达控制器,实现无线信号传输过程。
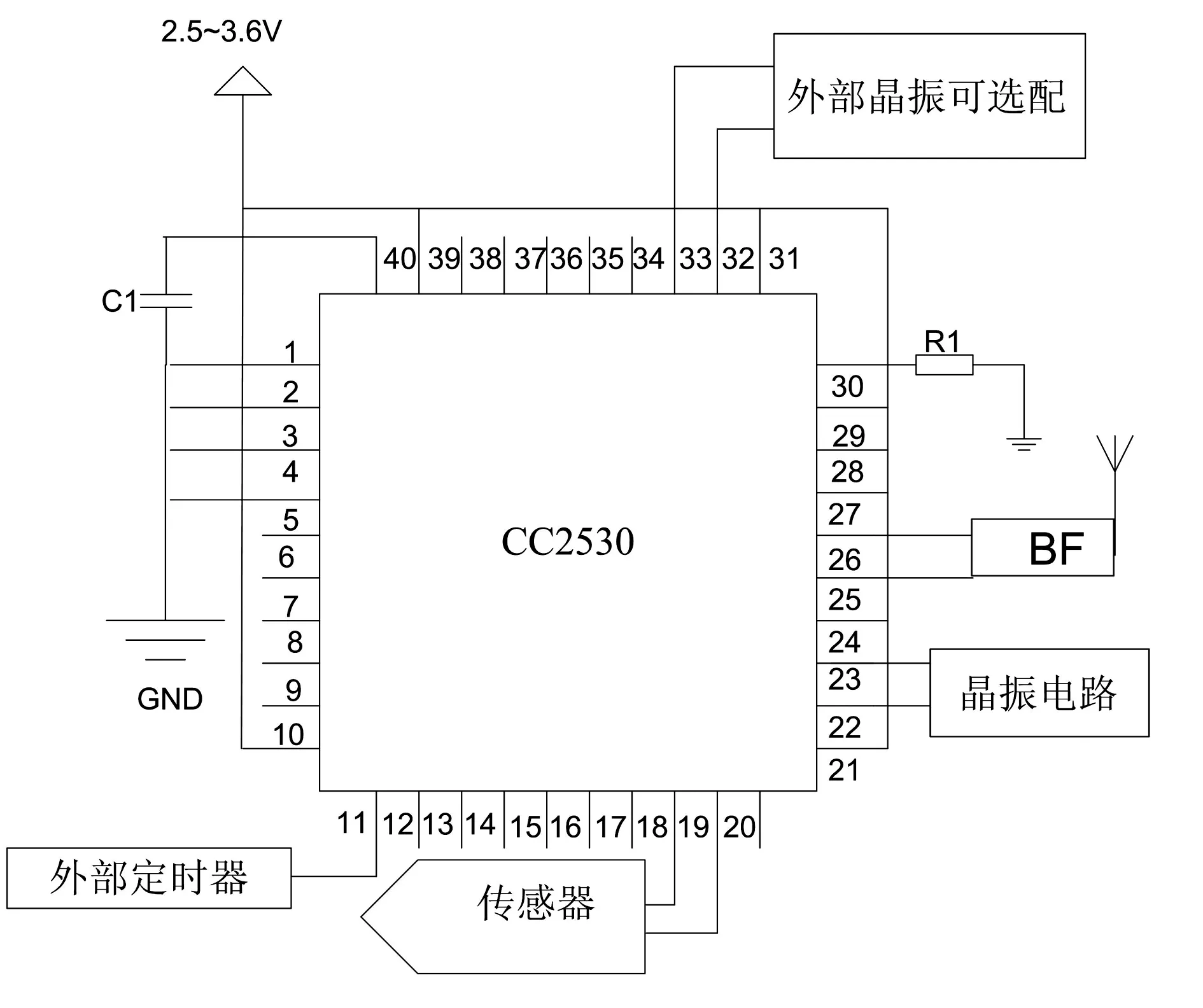
图6 传感器与CC2530模块的通信连接图
3 软件设计
3.1 系统软件设计
本系统主要包括嵌入式中央控制器模块、机械臂洒水模块、ZigBee技术网络、传感器监测模块及人机交互界面等,如图7所示。
中央控制器是利用分布式控制结构对各个监测区域的土壤湿度及空气的温湿度监测,采集信号传输方式采用HIM串口单线双向传输,系统的总体结构框图如图7所示。当FC-28传感器所在的检测区的土壤湿度达不到设定阈值时,DO口输出TTL数字信号1(即高电平),输出低电平时LED会被点灯,AO口进行模拟量的传输,该信号可通过AD模块转换成精准的数字信号,通过ZigBee网络传输到MCU。DHT11传感器可以由MCU触发信号直接控制电阻式感湿元件和NTC测温元件,MCU发送一次命令,被控制单元采集一次数据,命令执行完毕,启用低功耗休眠模式。MCU可对采集到模拟信号进行校准和转换,转换后的数字信号,采用单总线数据格式进行传输。
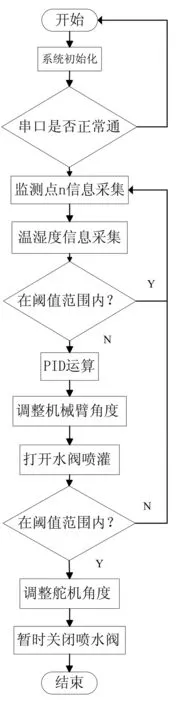
图7 总体系统的结构框图
3.2 机械臂的软件设计
将机械臂加入到喷灌系统中,是智能机器人领域向农业发展普及的必要一步,本设计利用两个舵机设计成3个自由度的机械臂,两个舵机之间的利用算法公式进行互补。图8为舵机的控制系统结构[11]。
控制机械臂的舵机的控制一般需要一个20ms一周期的时基脉冲,该脉冲的高电平部分一般为0.5~2.5ms范围内的角度控制脉冲部分,总间隔为2ms。
以180°角度伺服为例,其对应的控制关系如表1所示。
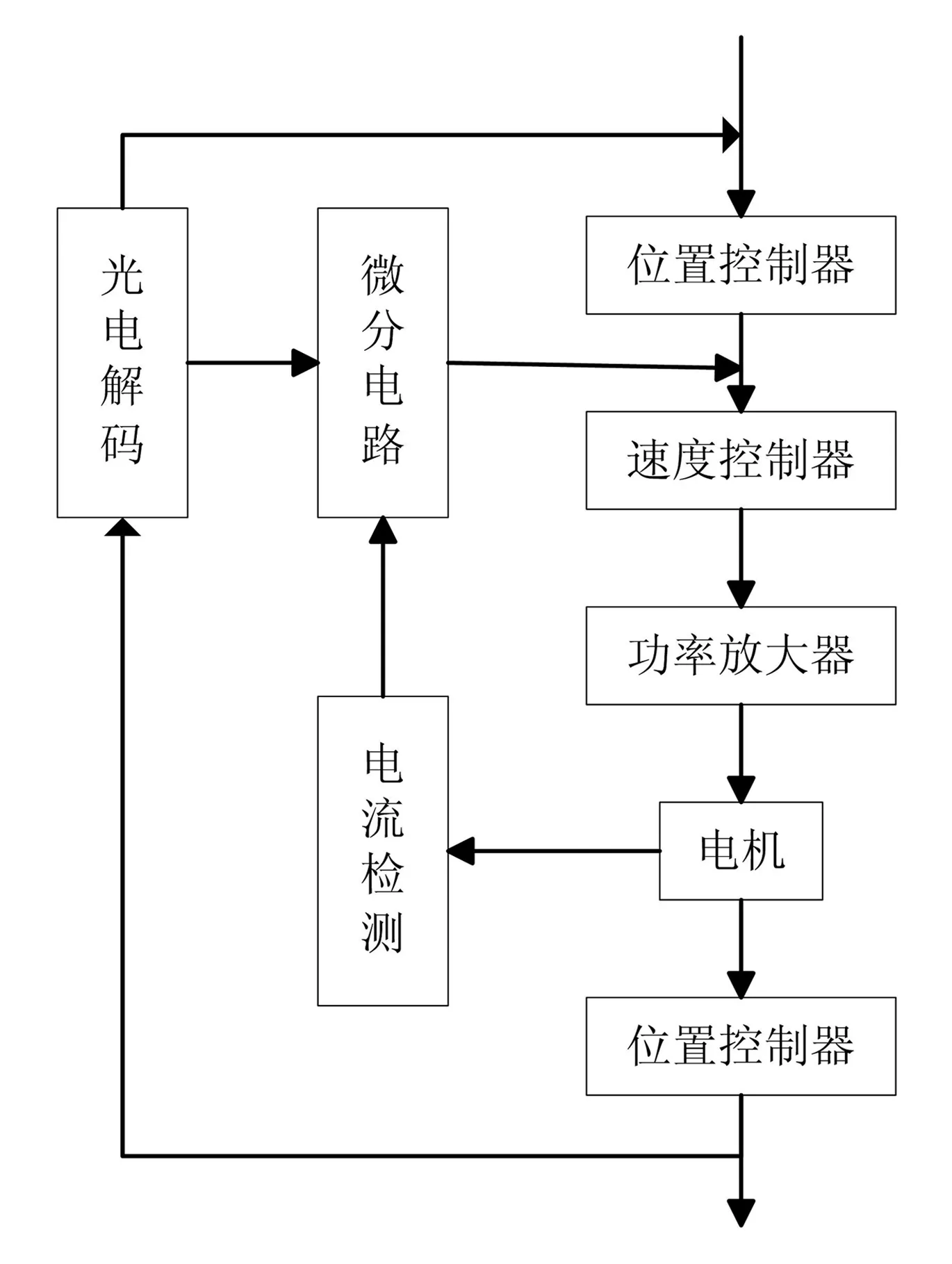
图8 舵机控制结构图
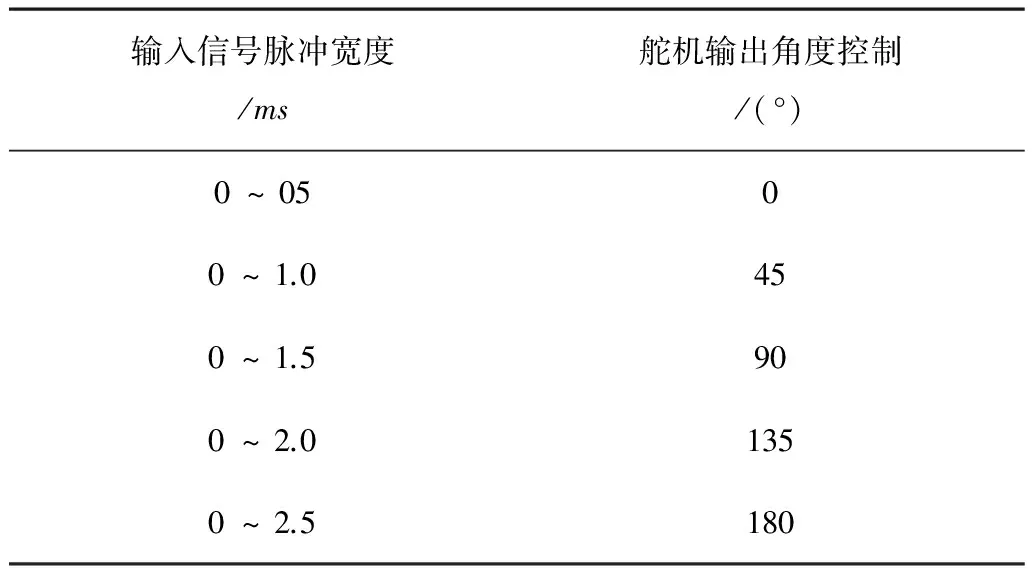
输入信号脉冲宽度/ms舵机输出角度控制/(°)0~0500~1.0450~1.5900~2.01350~2.5180

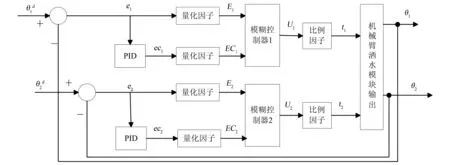
图9 机器人模糊控制系统
3.3 无线上位机设计
采用主从式结构使主控制结构的MCU与上位机的MCU通过窄带无线通道进行互信,数据即时传送,从而使上位机中收到的信息为即时信息,增强设计的精准性。
TJC3224T028人机交互界面,通过USART HMI软件设定UI界面,写入触发源程序,如图10所示。其上位机界面设置的主控界面,包括实时温湿度显示、事件触发进度条、help对话、机械臂角度显示、监测区域环境查询及灌溉设定等。图11为灌溉设定界面的设置。在灌溉设定界面输入格式为xx(区域)+yyy(角度)+zzz(距离)+ee(湿度)的格式,高位可用0占位,如:一号区域240°范围10m距离内湿度为50%可以输入0124001050。
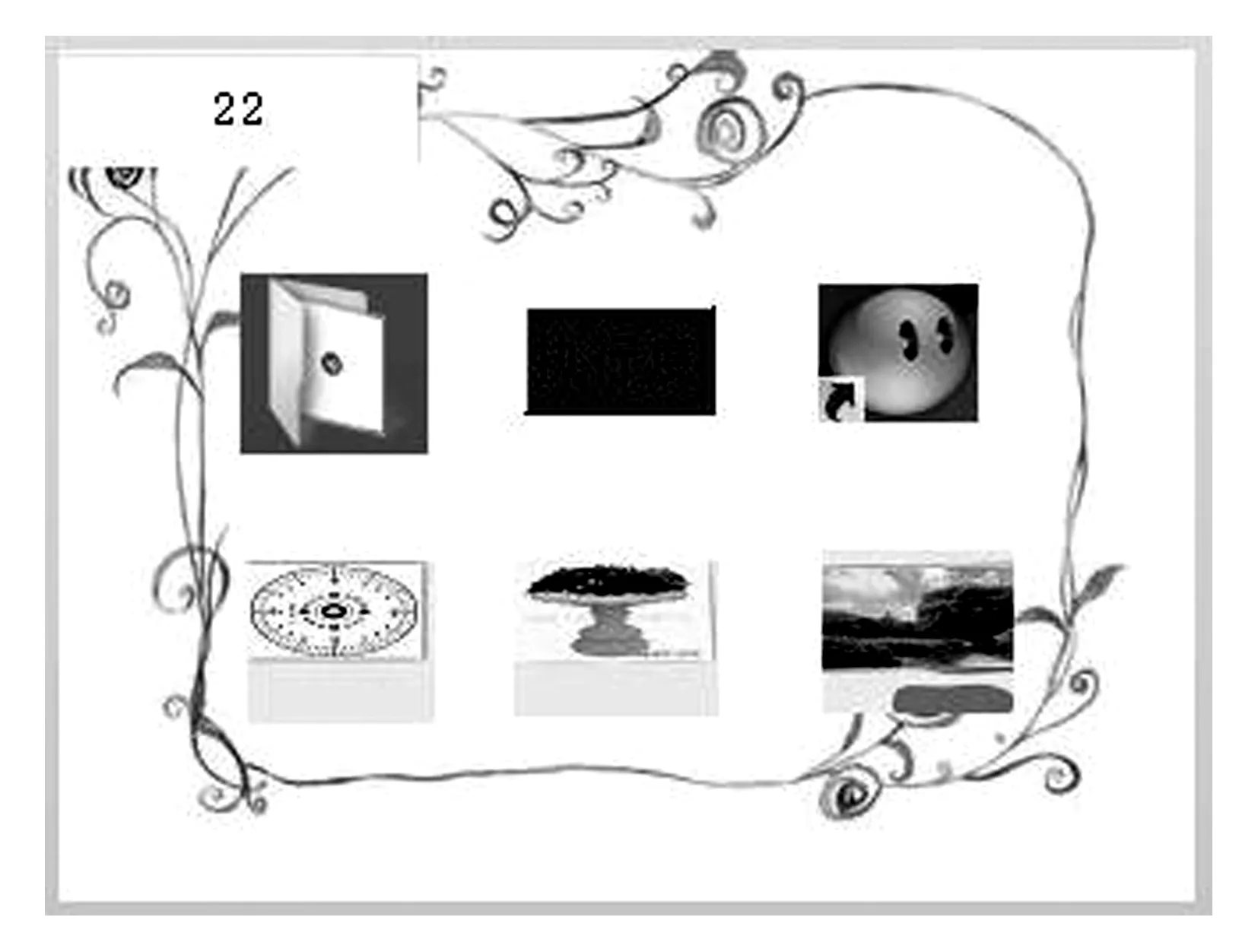
图10 上位机主界面
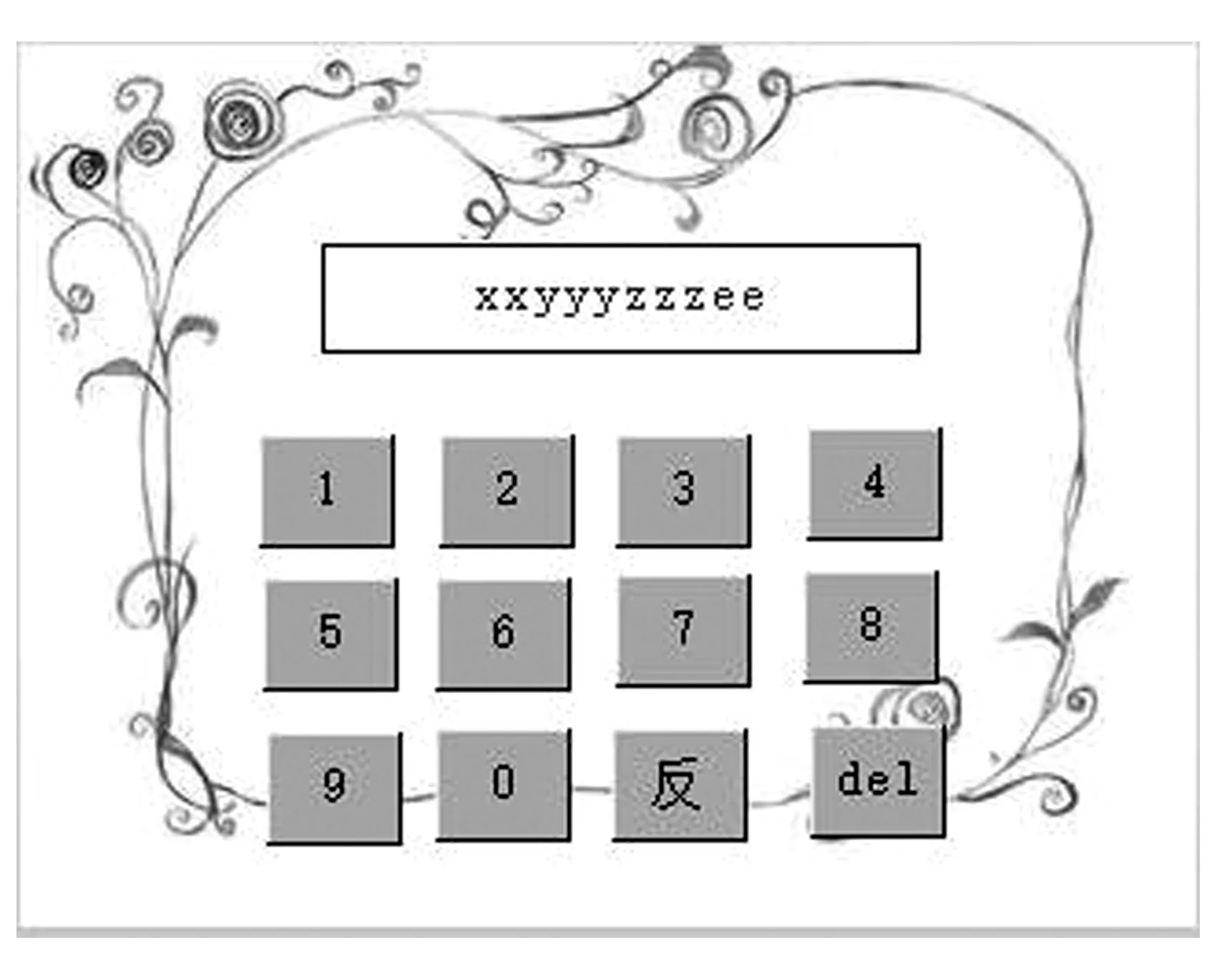
图11 灌溉设定界面
4 结论
针对地势复杂的地区灌溉问题,考虑到农田浇灌环境的不确定性而研究设计的机械臂智能灌溉系统,不仅操作方便、成本低、功耗低且稳定性强,实用价值高。本设计加入的无线上位机,方便农户远距离传输监控信息,或者在实际勘探过程中直接控制某区域的喷灌系统或查询某区域的实时情况是否适合农作物的最佳生长。另外,机械臂的喷灌加入也使智能机器人域踏入现代化农业建设中。经过大量的试验验证,运行状况良好,控制的准确性高,可靠性强,大幅地推动了农业与现代科技的融合。该设计能够实现与实际环境的对接,推广性强,目前已准备投放市场,具有很强的推广性和应用价值。
[1] 赵荣阳,王斌,姜重然.基于ZigBee的智能农业灌溉系统研究[J].农机化研究,2016,38(6):244-248.
[2] 王立志,李扬,何东朗,等. CC2530的主动移频法在分布式发电孤岛检测中的应用[J].单片机与嵌入式系统应用,2016(2):62-65.
[3] L.K. Wadhwa,Rashmi S. Deshpande,Vishnu Priye. Extended shortcut tree routing for ZigBee based wireless sensor network[J].Ad Hoc Networks,2016,37:295-300.
[4] 李卓,刘永红,杨勤.土壤水分入渗影响机制研究综述[J].灌溉排水学报,2011(5):124-130.
[5] 冯显英,葛荣雨.基于数字温湿度传感器SHT11的温湿度测控系统[J].自动化仪表,2006(1):59-61.
[6] 叶平,何雷,宋爽,等.空间机械臂地面微重力混合模拟方法研究[J].机器人,2013(3):299-305,312.
[7] 孙学岩.基于Zigbee无线传感器网络的温室测控系统[J].仪表技术与传感器,2010(8):47-49.
[8] 陈克克,岳青,彭燕,等.基于Zigbee的温室无线传感器节点设计与实现[J].农机化研究,2011,33(2):93-96.
[9] 王文贞.基于ZigBee无线传感器网络的土壤墒情监测系统[D].天津:河北工业大学,2014.
[10] 秦国栋.基于ZigBee无线网络的农村地区沼气抄表系统研究[J].黑龙江农业科学,2016(2):137-139.
[11] 陈鹏,刘璐,余飞,等.一种仿人机械臂的运动学逆解的几何求解方法[J].机器人,2012(2):211-216.
The Design of the Intelligent Irrigation System Based on ZigBee Network and Mechanical Arm
Wang Li1, Zhao Yanyang1, Hui Yanbo1, Yang Yuyan2, Chen Zhen1
(1.College of Electrical Engineering,Henan University of Technology, Zhengzhou 450001,China; 2.College of mechanical engineering,Nanjing University of Science and Technology,Nanjing 210094,China)
In order to solve the problem of automatic irrigation control in remote area, a embedded automatic water saving irrigation system is designed and implemented. The essay using STM32 controller as the core and ZigBee wireless network technology to collect the outdoor environment parameters, monitoring the temperature and humidity of the policy area by the host computer and realizing environmental monitoring and temperature and humidity controlling by the control unit. The central controller contacts with the host computer E31-TTL-50 by wireless communication with narrow band, realizes the mechanical arm intelligent irrigation,queries the data with remote monitoring system by the host computer、sets parameters and real-time monitoring requirements.
irrigation system; robot arm; ZigBee; fuzzy control
2016-06-06
“十二五”国家科技支撑计划项目(2012BAF12B13);粮食信息处理与控制教育部重点实验室资助项目(KF11-2015-101)
王 莉(1973- ),女,河南洛阳人,副教授,博士,( E-mail)haut_zyy@163.com。
赵艳阳(1990-),女,河南许昌人,硕士,( E-mail)haut_zyy@163.com。
S277;S126
A
1003-188X(2017)07-0137-06
