林隙主被动遥感协同自动识别*
2017-12-15毛学刚侯吉宇范文义东北林业大学林学院哈尔滨150040
毛学刚 侯吉宇 范文义(东北林业大学林学院 哈尔滨 150040)
林隙主被动遥感协同自动识别*
毛学刚 侯吉宇 范文义
(东北林业大学林学院 哈尔滨 150040)
【目的】 研究林隙主被动遥感协同自动识别方法,为进一步量化林隙特征提供技术支持。【方法】 以真彩色航空正射影像(0.2 m)和机载LiDAR(3.7点·m-2)为主被动遥感数据源,选取东北典型天然次生林——帽儿山实验林场东林施业区为研究区进行面向对象林隙识别。在面向对象分类过程中,通过对比3种分割方案(航空影像分割、LiDAR数据分割、航空影像amp; LiDAR协同分割)、10种尺度(10~100,步长为10)确定最优分割方案及尺度参数。在最优分割结果基础上应用航空影像的光谱特征、LiDAR数据提取的高度特征及共同特征,应用支持向量机分类器(SVM)进行林隙识别。【结果】 3种分割方案的最优尺度均为20; 所有尺度均是基于LiDAR数据分割ED3modified(0.52±0.11)低于基于航空影像分割(0.58±0.07)与航空影像amp; LiDAR协同数据分割(0.58±0.07)。在LiDAR数据最优尺度(20)下,采用光谱和高度共同特征的主被动识别与单独采用光谱特征的主动识别及单独使用高度特征的被动识别相比,分类精度分别提高36.71%和8.17%。【结论】 3种分割方案中,基于LiDAR数据分割结果最好; 使用主被动遥感协同自动识别进行林隙分类时精度最高(OA=87.73%, Kappa=0.81)。
林隙; 尺度分割; 分类特征; LiDAR; 航空影像; CHM; 支持向量机
林隙通常是指森林群落中,由于自然干扰(病虫害树个体的死亡、森林经营的间伐或采伐)而形成的将由新个体占据与更新的空间(Kupferetal., 1996; Suarezetal., 1997),其在森林的再生、周转与森林生态系统整体动态变化中起着重要作用(St-Ongeetal., 2014)。林隙可导致林下微环境转变(如太阳能、水和营养物),并影响林下生物多样性和生境。Vepakomma等(2011)研究发现,林隙可增加林隙周围半径30 m内森林非生物资源的可利用性。
林隙识别是量化林隙特征(大小、形状、动力学)的前提,更是进一步理解结构复杂森林物种更新、研究林下物种多样性的基础(Koukoulasetal., 2005)。与需要大量的实地验证和经验的人工解译相比,遥感是一种高效、准确的自动林隙识别技术; 然而中等空间分辨率的遥感数据能够识别较大的林隙,却不能识别小的林隙(30 m以下)(Asneretal., 2004; Negrón-Juárezetal., 2011; Clarketal., 2004)。高空间分辨率遥感数据(IKONOS、WordView等)的出现,使这一问题有了解决途径(Heetal., 2009; Malahlelaetal., 2014),其中,航空影像作为目前可用的最高空间分辨率遥感数据,在林隙识别方面将有着广阔的应用前景。LiDAR是当前最流行的主动遥感技术之一,其提取的数据不仅可以识别高程,而且还可以确定地物的高度与形状信息,已有研究将LiDAR数据应用于林隙的识别(Vepakommaetal., 2008; Gaultonetal., 2010; Koukoulasetal., 2004)。由于从LiDAR数据获取的树木及林隙垂直结构信息能够补充光学遥感影像中的光谱信息,因此光学遥感影像与LiDAR数据协同能获得更好的林隙分类结果(Yangetal., 2015a)。
采用航空影像amp; LiDAR协同进行林隙识别,传统基于像元的分类方法已经不再适合(Johansenetal., 2010)。作为传统方法的替代,面向对象分类方法可以减少地理对象的光谱变异。面向对象分类的基本单位是对象,对象的环境因素,如高程、坡度、坡向等都可以用于分类,面向对象分类方法与基于像元的分类方法相比,能够获得更高的林隙识别精度(Bonnetetal., 2015)。鉴于此,本研究以航空正射影像和LiDAR为主被动遥感数据源,采用面向对象分类方法对东北典型天然次生林——帽儿山实验林场东林施业区进行林隙识别,研究目的主要为: 1) 研究航空影像amp; LiDAR协同是否能提高分割质量; 2) 定量评价分割尺度参数对林隙分割质量的影响; 3) 研究航空影像与LiDAR数据提取的对象特征在面向对象林隙识别中的作用。
1 研究区概况与数据源
1.1 研究区概况
以黑龙江省尚志市境内东北林业大学帽儿山实验林场东林施业区(45°17′—45°21′N, 127°35′—127°41′E)为研究区(图1),该区南北长6.7 km,东西宽5.7 km,总面积3 011 hm2。植被属于长白山植物区系,是由地带性顶级植被阔叶红松(Pinuskoraiensis)林经人为干扰破坏后形成的典型天然次生林(卢军等, 2011)。森林郁闭度在0.6以上,平均年龄56年,乔木平均高15.7 m。次生林类型多样且具代表性,群落类型有硬阔叶林、软阔叶林、针叶林和针阔混交林,主要阔叶树种包括蒙古栎(Querusmongolica)、白桦(Betulaphatyphylla)、山杨(Populusdavidiana)、枫桦(Betulacostata)、水曲柳(Fraxinusmandshurica)、榆树(Ulmuspumila)、色木槭(Acermono)、紫椴(Tiliaamurensis)、胡桃楸(Juglansmandshurica),主要针叶树种为兴安落叶松(Larixgmelinii)。该研究区林隙的类型、大小和结构各有不同。
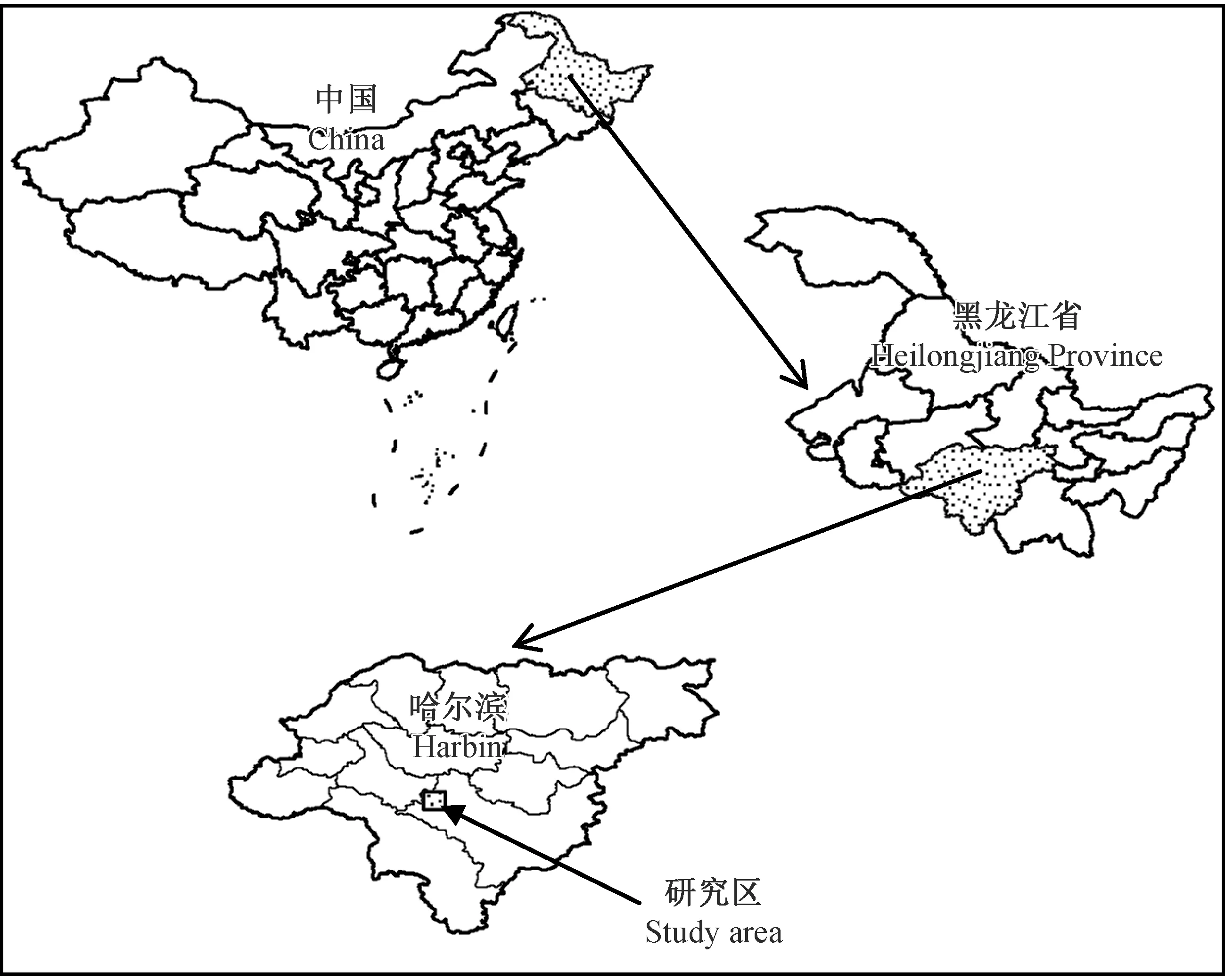
图1 研究区(东北林业大学帽儿山实验林场东林施业区)Fig.1 Study area(Donglin industry zone Mao’ershan experimental forest farm of Northeast Forestry University)
1.2 数据源
1.2.1 遥感数据 LiDAR数据采集使用LiteMapper 5600激光雷达系统,该系统采用LMS-Q560激光扫描仪,飞行平台采用国产运-10飞机。采集时间为2015年9月14—15日(落叶季节),天气晴朗无云,对LiDAR数据采集没有影响。LiteMapper 5600系统集激光测距、全球定位系统(GPS)和惯性导航系统(INS)于一体,包括一个单束窄带激光器和一个接收系统。激光器工作波长为1 550 nm,激光束发散角为0.5 m·rad,波形数据记录间隔为1 ns,获得的平均点云密度约3.7点·m-2。为确保低反射率目标的有效接收,脉冲重复频率设为50 kHz。记录全波形数据,地表定位精度为水平0.2 m、垂直0.15 m(平地)。此外,CCD相机同步获取的航空影像数据空间分辨率为0.2 m。经过与差分GPS实测高程比较,获取的LiDAR数据高程精度优于0.3 m,平面精度优于0.5 m。采集的数据包括航空正射影像(digital orthophoto map, DOM)(图2A)、LiDAR数据提取的数字高程模型(digital elevation model, DEM)和数字表面模型(digital surface model, DSM)。森林冠层高度模型(canopy height model, CHM)由DSM和DEM数据相减获得,空间分辨率为2 m,数据类型为浮点型(32位)(图2B)。DOM采用最邻近值方法进行重采样到空间分辨为2 m,与CHM空间分辨率一致,数据类型为无符号整型(8位)。DOM与CHM数据均为TIFF格式,使用西安80地理坐标系的高斯克吕格3度带投影坐标系。
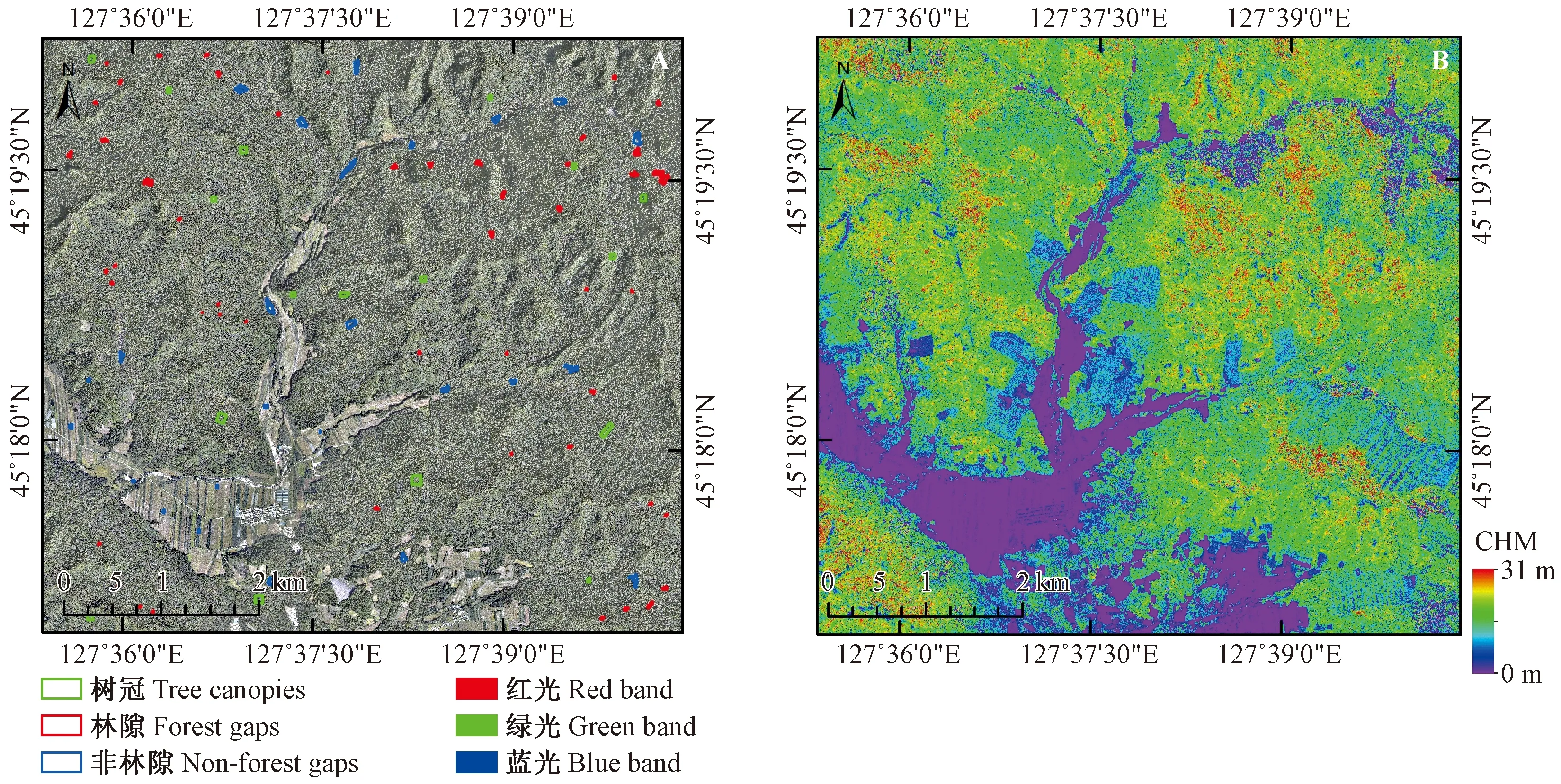
图2 航空正射影像及LiDAR提取的CHMFig.2 Aerial image digital orthophoto map and LiDAR derived CHMA. 航空正射影像(DOM); B. LiDAR提取的CHM(CHM)。绿色、红色和蓝色多边形分别代表树冠、林隙和非林隙。A. Aerial digital orthophoto image (DOM); B. LiDAR derived CHM (CHM).Green, red, and blue polygons represent the reference tree canopies, forest gaps, and non-forest gaps, respectively.
1.2.2 辅助数据 以真彩色航空正射影像为底图(0.2 m),结合CHM数据及野外调查数据,手工数字化一套包括林隙、非林隙和树冠3种类型的参考多边形数据。对该套多边形高度平均值、标准差以及光谱平均值进行统计分析,制定规则集对样本进行进一步筛选。对于林隙样本对象,其高度平均值小于3 m,高度标准差均大于1 m,对象光谱平均值均较低; 对于非林隙样本对象,其高度平均值一般都较低,大部分不会超过0.5 m,标准差则多数小于0.5 m,对象光谱平均值相对较高; 对于冠层样本对象,通过高度即可容易地判断出来,高度平均值除极个别幼龄林冠层以外均大于3 m。根据上述规则对样本进行进一步筛选,最终选取包含53个林隙多边形(10 325个像素)、25个非林隙多边形(15 447个像素)和17个树冠多边形(14 809个像素)的一套样本(图2)。该套参考多边形样本作为面向对象分类的训练样本与检验样本,同时作为10折交叉验证方法进行精度验证的样本。在该套样本中,随机抽取35个林隙参考多边形、20个非林隙参考多边形共55个参考多边形作为分割参考对象,用于评价分割质量。
2 研究方法
面向对象分类方法进行林隙识别包括3个过程: 1) 影像分割即创建对象; 2) 对象特征提取; 3) 面向对象分类。采用3种分割方案(基于航空影像分割、基于LiDAR数据分割、航空影像amp; LiDAR协同分割)进行多尺度影像分割即创建对象,对于每种分割方案都试验10种分割尺度(10~100,步长为10),采用修正的欧式距离3(ED3modified)评价分割结果(Yangetal., 2015b),确定最优分割尺度参数。以最优分割尺度参数进行影像分割,使用航空影像与LiDAR数据提取对象光谱和高度特征,采用支持向量机(support vector machine, SVM)分类器进行林隙识别,制作林隙专题图,技术路线如图3所示。
2.1 影像分割
影像分割采用eCognition Developer 8.7(易康)软件的分割算法[多尺度分割(multiresolution segmentation, MRS)]。MRS利用区域合并算法,分割过程由4个参数控制——尺度、形状、紧密度和输入图层所占权重(Benzetal., 2004)。分割大小主要由尺度参数决定,因此设置不同的尺度参数,输入图层所占权重、形状和紧密度采用默认值(1、0.1和0.5)。基于航空影像分割采用3个分量(Blue、Green、Red),基于LiDAR数据分割使用LiDAR数据提取的CHM,航空影像amp; LiDAR协同分割采用航空影像的3个分量和CHM。
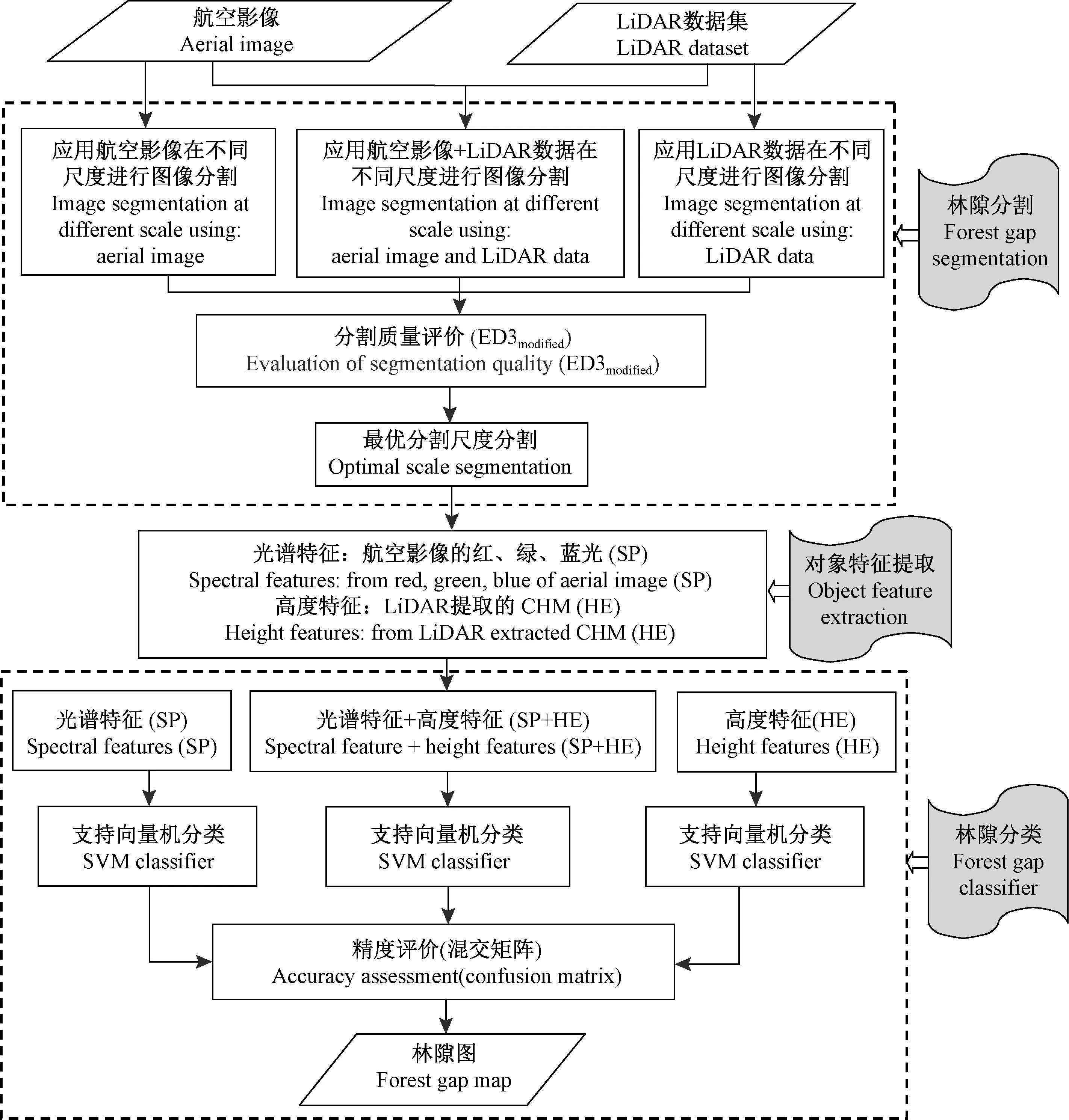
图3 航空影像和LiDAR数据协同的自动林隙识别及分类流程Fig.3 Flowchart of the automated gap recognition and classification using aerial image and LiDAR data
2.2 对象特征提取
分类过程中采用的对象特征根据航空影像的光谱(Blue、Green、Red)与LiDAR数据提取的高度信息(CHM)计算得到(表1)。对象特征只计算每个数据层的均值与标准差(Ecognition, 2010),对象的几何特征(形状、紧密度)并没有采用,因为林隙的形状与紧密度是多种多样的。本研究共选取8个特征指标,其中6个特征指标来自航空影像,2个特征指标来自CHM。
2.3 面向对象分类
根据选择的训练样本及提取的对象特征,将研究区分为林隙、非林隙和树冠3种类型。对于林中空地本研究将划分为非林隙,主要通过林中空地与林隙的高度和光谱特征进行区分: 1) 由于林隙中存在明显的再生植被,而林中空地没有植被覆盖,所以采用高度特征即可区分林中空地和林隙; 2) 由于林隙对象较小,受周围植被的影响光谱较暗,而林中空地(非林隙)面积较大,受冠层之间的遮挡影响较小光谱较亮,因此采用光谱特征也可以区分林中空地和林隙。本研究采用eCognition Developer 8.7软件提供的SVM分类器进行分类。SVM分类器通过非线性变换将输入空间变换到一个高维的特征空间,然后在这个新的高维特征空间中求取最优分类超平面(Vapnik, 2000)。对输入数据的这种变换是通过核函数进行的[线性、多项式、径向基(radial basis function, RBF)、S形]。在最优分割结果的基础上,应用光谱、高度及共同特征作为输入数据(表1),采用带有线性核函数的SVM分类器进行分类,定量评价对象特征在面向对象林隙分类中的作用。
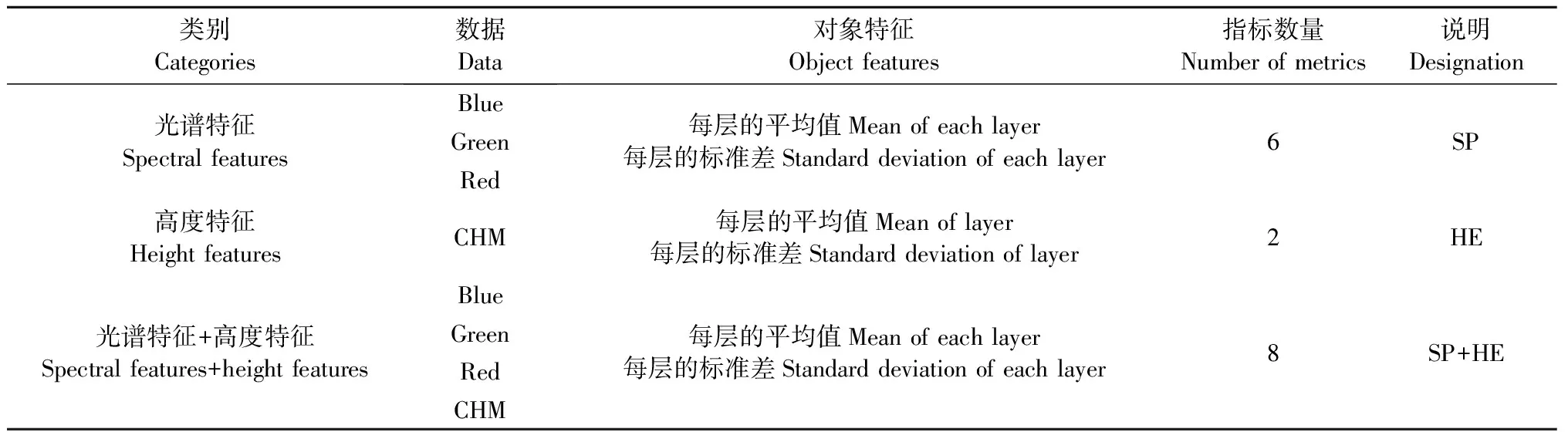
表1 面向对象分类的对象特征Tab.1 Image object features used in the classifications
2.4 分割质量评价
分割质量的定量评价已有一些指标(Clintonetal., 2010; Liuetal., 2012; Mölleretal., 2007; Zhanetal., 2007),本研究采用修正的欧式距离3(ED3modified)进行分割质量评价(Yangetal., 2015b)。该指标的优点是当与一个参考多边形的重叠区域超过该参考多边形或被分割对象的50%时,被分割对象才被标记为相应参考多边形的分割。ED3modified是介于0~1之间的归一化指数,计算公式如下:
(1)
式中:ri为参考多边形;I为参考多边形的数量;sj为对应参考多边形ri的分割多边形;ji为相对应的分割数。
ED3modified越低,表示分割质量越高。采用抽取的55个参考多边形作为分割参考对象,应用ArcGIS 10.0软件计算ED3modified对分割质量进行评价,最优尺度和最佳分割结果由ED3modified最低值确定。
2.5 分类结果精度评价
分类结果精度评价采用混淆矩阵计算的用户精度(user’s accuracy, UA)、生产者精度(producer’s accuracy, PA)、总精度(overall accuracy, OA)和Kappa系数4个评价指标(Janssenetal., 1994)。Kappa系数的计算公式如下:
(2)
式中:N表示抽取的验证点数;r表示类型数;xii表示验证点中为i种类型且验证结果为正确的总点数;xi+表示真实情况为第i种类型的验证点总数;x+i表示被分成了第i种类型的验证点总数。
3 结果与分析
3.1 影像分割质量评价
在10~100尺度上,基于LiDAR数据分割ED3modified(0.52±0.11)低于基于航空影像分割(0.58±0.07)及二者协同分割ED3modified(0.58±0.07)(图4),说明基于LiDAR数据分割质量优于其他2种分割方案。基于航空影像分割结果与航空影像amp; LiDAR协同分割结果无明显差别。影像分割质量除了受尺度参数影响外,分割过程中所用数据特性也会影响分割质量,因为采用相同的分割尺度,3种分割方案具有不同的ED3modified(图4)。本研究将3种分割方案获得最低ED3modified的尺度参数定义为最优尺度参数。3种分割方案都在尺度参数20 时ED3modified最低,因此3种分割方案的最优分割尺度均为20。基于LiDAR数据在最优尺度获得的ED3modified最低(ED3modified=0.34),因此采用该分割结果进行后续的面向对象分类。
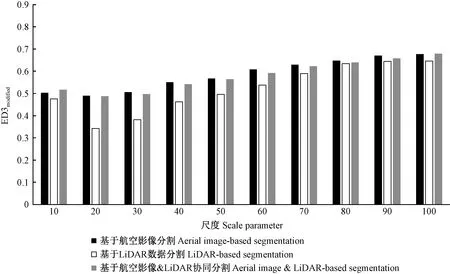
图4 3种分割方案(基于航空影像分割、基于LiDAR数据分割和航空影像amp; LiDAR协同分割)尺度参数在10~100尺度分割结果的ED3modifiedFig.4 ED3modified values for the tree species segmentation results using aerial image, LiDAR data and both Aerial image amp; LiDAR as a function of the scale parameter ranging between 10 and 100
3.2 影像分割结果
对分割所得对象进行可视化检查可知,分割对象特征(大小和形状)受尺度参数影响。对于非林隙(图5A、B所示的空地),由于光谱和阴影影响,导致航空影像出现过度分割(图5C),航空影像amp; LiDAR协同分割也会轻微受阴影影响,使得分割多边形与参考多边形边界不能很好重合(图5E、F)。基于LiDAR数据分割的效果最好,尽管有些稍微过度分割。对于大多数林隙(图6A、B),基于航空影像仍然会有些过度分割(图6C),这主要是由于林隙与相邻冠层光谱特性无明显差异造成的。基于LiDAR数据分割的效果最好(图6D),分割产生的林隙多边形与参考林隙边界和形状都基本吻合。航空影像的加入并没有提高分割质量,而是导致了分割产生的林隙与参考林隙边界及形状的不一致(图6E、F)。
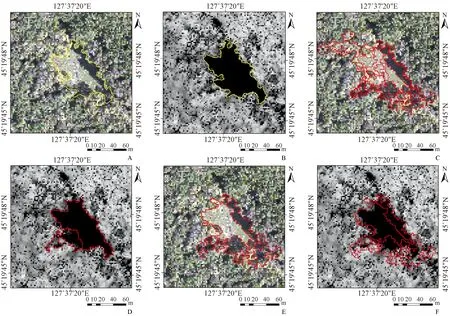
图5 3种分割方案的非林隙分割结果示例Fig.5 Examples of non-forest gap segmentation results by three segmentation schemeA. 显示在航空影像上的非林隙(空地)参考多边形; B. 显示在LiDAR数据(CHM)上的非林隙(空地)参考多边形; C. 尺度参数为20的航空影像的非林隙(空地)分割结果;D.尺度参数为20的LiDAR数据(CHM)的非林隙(空地)分割结果; E. 显示在航空影像上的尺度参数为20的航空影像amp; LiDAR协同非林隙(空地)分割结果; F. 显示在LiDAR数据(CHM)的尺度参数为20的航空影像amp; LiDAR数据协同非林隙(空地)分割结果。A. Shows the reference geo-objects of non-forest gaps(open space) impose on the aerial image; B. Shows the reference geo-objects of non-forest gaps(open space) impose on LiDAR data(CHM); C. Indicates the result of non-forest gaps(open space) segmentation using the aerial image at the scale parameter of 20; D. Indicates the result of non-forest gaps(open space) segmentation using the LiDAR data at the scale parameter of 20; E. Shows the result of non-forest gaps(open space) segmentation impose on the aerial image using the aerial image and LiDAR data at the scale parameter of 20; F. Shows the result of non-forest gaps(open space) segmentation impose on the LiDAR data(CHM) using the aerial image and LiDAR data at the scale parameter of 20.
3.3 不同分类特征的分类精度比较
最优尺度下(尺度参数=20)应用光谱、高度及共同特征3种分类方案的精度评价见表2。单独采用光谱特征(光谱平均值和标准差)的分类方案,非林隙生产者精度仅为19.93%,用户精度仅为30.57%,总体精度只有51.02%(Kappa=0.30),主要是单独采用光谱特征进行分类将非林隙错分为林隙而导致。采用光谱和高度共同特征的分类方案,生产者精度范围为77.42%~94.52%,用户精度范围为80.58%~91.90%,并获得了最高分类精度(OA=87.73%, Kappa=0.81),说明各个林隙、非林隙和树冠的分类结果与实际情况较为吻合,分类结果比较理想。采用高度、高度和光谱共同特征分类,林隙生产者精度高于采用光谱特征的生产者精度,但二者差别不大,说明高度特征非常适合林隙识别。基于光谱+高度共同特征分类与使用高度特征分类相比,减少了非林隙和树冠错分现象,总精度提高了约8个百分点,但林隙的生产者精度却降低了0.78%,非林隙和树冠的用户精度并无明显变化(表2)。
3.4 林隙专题图
基于LiDAR数据在最优尺度进行分割,采用光谱和高度共同特征,应用SVM分类器的试验区林隙分类结果如图7所示。研究区各个类型的林隙都能被很好地识别(如林隙专题图右下角由采伐产生的长条林隙),分布在森林中面积很小的林隙也能被识别。另外,图7非林隙中存在林隙主要有3方面原因: 1) 非林隙中存在少数落叶的阔叶树导致,因为数据获取时间为9月14—15日,研究区已经有落叶情况; 2) 非林隙中部分冠层高度比较低(幼树),导致将冠层分成林隙; 3) 航空影像光谱特征中的阴影影响,导致将森林和非林隙的边缘处阴影分成林隙。
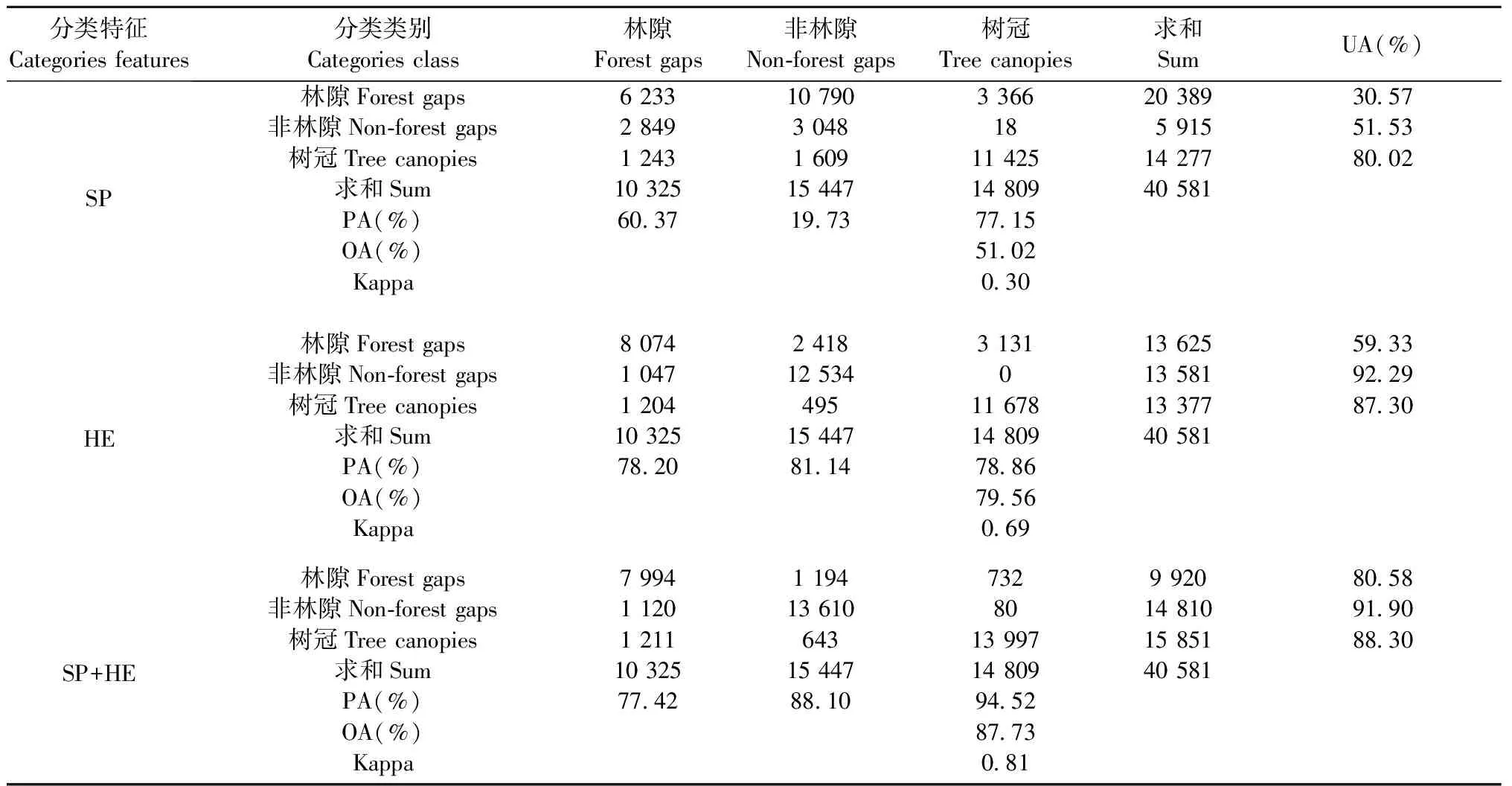
表2 最优尺度下分类精度评价Tab.2 Accuracy assessment for classification at optimal scale
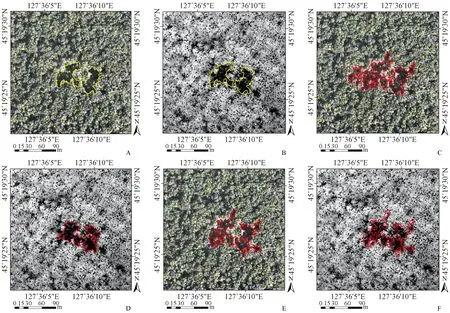
图6 3种分割方案的林隙分割结果示例Fig.6 Examples of forest gap segmentation results by three segmentation schemeA. 显示在航空影像上的林隙参考多边形; B. 显示在LiDAR数据(CHM)上的林隙参考多边形; C. 尺度参数为20的航空影像的林隙分割结果;D. 尺度参数为20的LiDAR数据的林隙分割结果; E. 显示在航空影像上的尺度参数为20的航空影像amp; LiDAR协同林隙分割结果; F. 显示在LiDAR数据(CHM)的尺度参数为20的航空影像amp; LiDAR数据协同林隙分割结果。A. Shows the reference geo-objects of forest gaps impose on the aerial image; B. Shows the reference geo-objects of forest gaps impose on LiDAR data(CHM); C. Indicates the result of forest gaps segmentation using the aerial image at the scale parameter of 20; D. Indicates the result of forest gaps segmentation using the LiDAR data at the scale parameter of 20; E. Shows the result of forest gaps segmentation impose on the aerial image using the aerial image and LiDAR data at the scale parameter of 20; F. Shows the result of forest gaps segmentation impose on the LiDAR data(CHM) using the aerial image and LiDAR data at the scale parameter of 20.
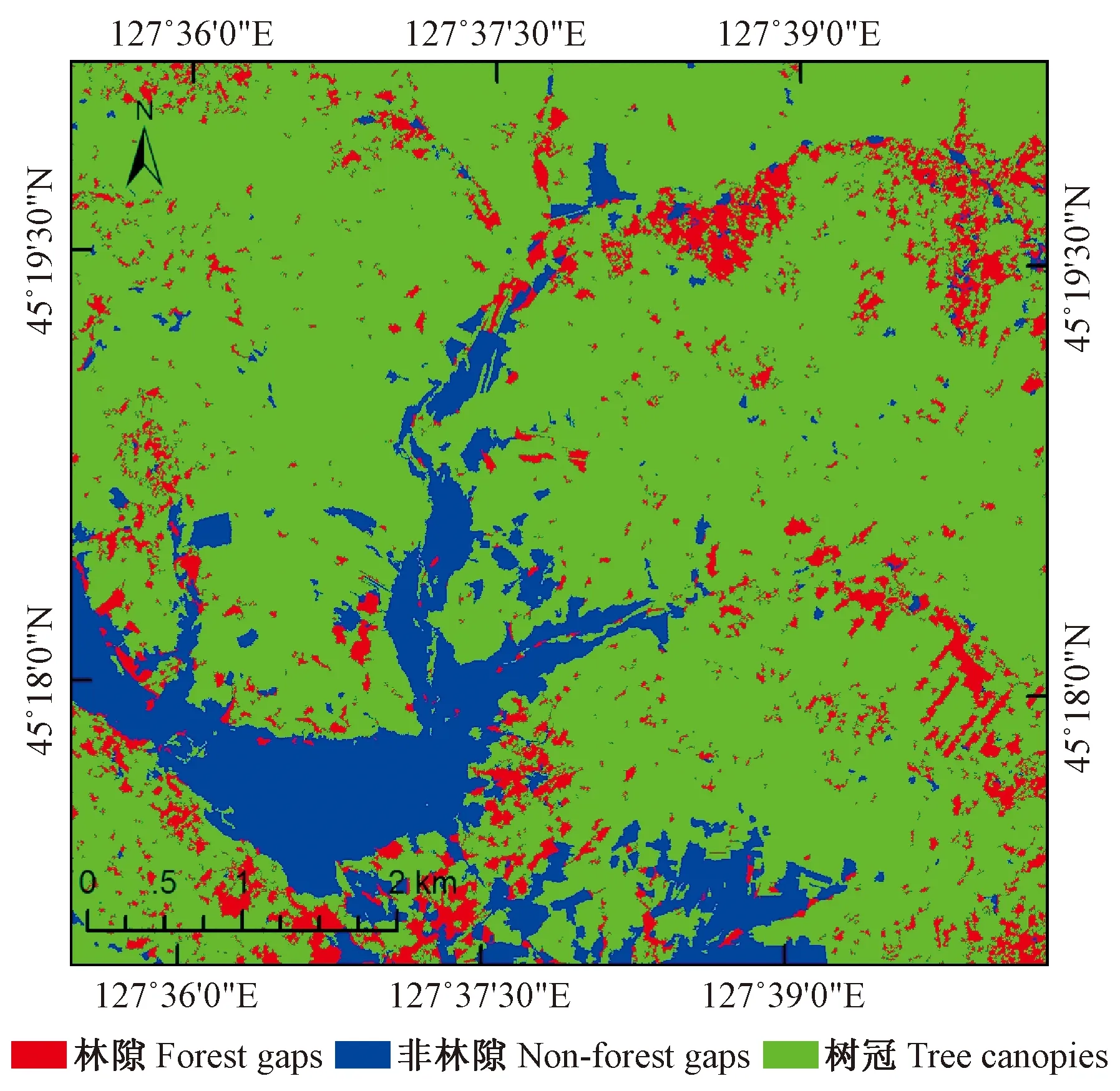
图7 林隙(红)、非林隙(蓝)和树冠(绿)专题示例Fig.7 Thematic map of forest gaps(red), non-forest gaps(blue) and tree canopies(green)
4 讨论
4.1 尺度参数对分割质量的影响
诸多因素都会影响影像分割质量,如输入数据、权重、形状因子、紧密度因子、尺度参数等。尺度参数是影响分割质量的最重要参数,并影响后续分类结果(Keetal., 2010)。在eCognition Developer 8.7软件中,尺度参数是一个没有被定义的抽象名词,然而尺度参数影响着分割的空间尺度,因为尺度参数与对象大小有关,大尺度产生大面积对象,小尺度产生小面积对象(Benzetal., 2004)。基于LiDAR数据分割与航空影像、航空影像amp; LiDAR协同分割相比质量更优(ED3modified更低),主要原因是高度信息比光谱信息对林隙更加合适,林隙在高度信息上的边界比光谱信息更加明显,Yang等(2015a)也得到类似的结论。
在所有尺度(10~100)上,3种分割方案的ED3modified都呈现先降低后增加的趋势。基于航空影像分割在小尺度下的ED3modified较高可以解释为由光谱和阴影影响引起的类内变化过大。由于对象面积随尺度增大而变大,光谱和阴影影响变弱,并且对象度量能够代表林隙、非林隙平均水平,ED3modified也会随之降低。基于LiDAR数据在较小尺度上进行分割能够比基于航空影像获得更优的分割结果,主要是LiDAR数据提取的CHM能更好地体现林分的同质性,林隙边界比航空影像的边界清晰,并且能够消除阴影的影响。但是,尺度的增大也有限制,在一些尺度下对象面积超过一个单一林隙、非林隙大小,就会引起ED3modified升高。
4.2 最优分割尺度的确定
本研究的最优分割尺度定义为能获得最优分割质量的尺度,因此3种分割方案都定义了单一的最优分割尺度。虽然3种分割方案的最优分割尺度都为20,但分割质量是有差别的(航空影像: ED3modified=0.49; LiDAR: ED3modified=0.34; 航空影像amp; LiDAR协同: ED3modified=0.48)。之前研究存在2种最优尺度的定义方式,即定义单一最优尺度(Kimetal., 2008; Wangetal., 2004)和定义一个最优尺度范围(Keetal., 2010)。本研究基于航空影像及航空影像amp; LiDAR协同分割在尺度参数10~30有相似的ED3modified(图7),但基于LiDAR数据进行分割在尺度参数10~30的ED3modified与其他2种分割方案比较明显不同,因此更倾向于定义单一最优尺度。
4.3 对象特征在面向对象分类中的作用
对象特征是面向对象遥感信息提取的主要依据。采用面向对象分类方法对遥感影像进行林隙分类,最突出的优势是不仅可以利用遥感影像分割产生的林隙对象光谱特征,而且还可以利用林隙对象高度特征,该特征能够提高林隙分类精度(Yangetal., 2015a)。本研究获得相同的结论: 采用加入LiDAR数据提取的高度特征提高了林隙分类精度,如结合LiDAR数据提取的高度特征能够将基于光谱特征的分类精度提高36.71%。精度提高的主要原因是高度特征通常能表示一个林隙的同质性,高度特征是区分林隙和非林隙最有利的特征,并且可以减少由光谱和阴影影响引起的相邻对象的类内变异。本研究仅使用光谱特征的分类存在较严重的林隙和非林隙错分现象,主要有3方面原因: 1) 该研究区域主要的非林隙为空地,空地与林隙只依据光谱特征很难区分; 2) 选用的光谱特征只包括光谱的平均值和标准差,缺少其他明显特征如纹理特征; 3) 本研究采用的航空影像缺少区分植被和非植被最明显的近红外波段,也导致林隙与非林隙的错分。
4.4 航空影像与LiDAR数据集成
目前可应用的各种遥感传感器越来越多,协同使用多源遥感数据越来越受到关注。多源遥感数据集成是目前面向对象分类的首选方法,如树种分类(Dalponteetal., 2014; Holmgrenetal., 2008; Ørkaetal., 2012)。数据集成成功与否主要取决于多源遥感数据的兼容性,即空间、光谱、时间和辐射分辨率的一致性。本研究采用的LiDAR数据空间分辨率(2 m)与航空影像的空间分辨率(0.2 m)并不一致,为保证2种遥感数据的空间分辨率一致性,对航空影像进行重采样,将空间分辨率降低到2 m,这可能会给林隙分类带来误差。多源遥感数据同时采集是数据集成成功的关键。本研究所采用的航空影像与LiDAR数据是同一时间采集的(2015年9月14—15日),保证了时间分辨率的一致。数据中的另一个潜在误差来源可能是2种数据的辐射分辨率,因为数据协同使用通常忽略辐射分辨率。本研究航空影像辐射分辨率为8位无符号整型,数值范围为0~255,这与CHM数据完全不同(32位浮点型)。今后应进一步研究数据范围不一致是否会降低数据集成在面向对象分类中的有效性。
5 结论
本研究选取东北典型天然次生林——帽儿山实验林场东林施业区为研究区,探讨了主被动遥感协同面向对象林隙识别的全过程。单独使用LiDAR数据分割质量明显高于单独使用航空影像分割和航空影像amp; LiDAR协同分割质量。基于LiDAR数据在尺度参数20上进行分割,并使用光谱和高度共同特征进行面向对象林隙识别获得了最高精度(OA=87.73%, Kappa=0.81)。
分割质量除了受尺度参数影响外,分割过程中所使用的数据特性也会影响分割质量,使用高度特征和高度+光谱特征分类结果精度高于光谱特征分类精度。本研究不仅为林隙的遥感识别提供参考和借鉴,也为林隙特征量化提供技术支持。应该指出的是,本研究对林隙进行分割与分类采用的是MRS算法和SVM分类器,应进一步研究其他分割与分类方法是否与本研究获得相同的结论。
卢 军, 李凤日, 张会儒, 等. 2011. 帽儿山天然次生林主要阔叶树种叶量分布模拟.林业科学,47(12):114-120.
(Lu J, Li F R, Zhang H R,etal. 2011. Simulation of foliage distribution for major broad-leaved species in secondary forest in Mao’er Mountain.Scientia Silvae Sinicae, 47(12):114-120. [in Chinese])
Asner G P, Keller M, Pereira R J,etal. 2004. Canopy damage and recovery after selective logging in Amazonia: field and satellite studies. Ecological Applications, 14(sp4):S280-S298.
Benz U C, Hofmann P, Willhauck G,etal. 2004. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. International Journal of Photogrammetry amp; Remote Sensing, 58(3/4):239-258.
Bonnet S, Gaulton R, Lehaire F,etal. 2015. Canopy gap mapping from airborne laser scanning: an assessment of the positional and geometrical accuracy. Remote Sensing, 7(9):11267-11294.
Clark M L, Clark D B, Roberts D A. 2004. Small-footprint LiDAR estimation of sub-canopy elevation and tree height in a tropical rain forest landscape. Remote Sensing of Environment, 91(1):68-89.
Clinton N, Holt A, Scarborough J,etal. 2010.Accuracy assessment measures for object-based image segmentation goodness. Photogrammetric Engineering amp; Remote Sensing, 76(3):289-299.
Dalponte M, Ørka H O, Ene L T,etal. 2014. Tree crown delineation and tree species classification in boreal forests using hyperspectral and ALS data. Remote Sensing of Environment, 140(1): 306-317.
Ecognition B. 2010. User Guide. Definiens Imaging GmbH. Munich: Definiens Imaging.
Gaulton R, Malthus T J.2010. LiDAR mapping of canopy gaps in continuous cover forests: a comparison of canopy height model and point cloud based techniques. International Journal of Remote Sensing, 31(5):1193-1211.
He Y H, Franklin S E, Guo X L,etal. 2009. Narrow-linear and small-area forest disturbance detection and mapping from high spatial resolution imagery. Journal of Applied Remote Sensing, 3(1):2701-2712.
Holmgren J, Persson Å, Söderman U.2008. Species identification of individual trees by combining high resolution LiDAR data with multi-spectral images. International Journal of Remote Sensing,29(5):1537-1552.
Janssen L L F, Wel F J M. 1994.Accuracy assessment of satellite derived land-cover data: a review. Photogrammetric Engineering amp; Remote Sensing,60(4):419-426.
Johansen K, Arroyo L A, Phinn S,etal. 2010. Comparison of geo-object based and pixel-based change detection of riparian environments using high spatial resolution multi-spectral imagery.Photogrammetric Engineering amp; Remote Sensing, 76(2): 123-136.
Ke Y, Quackenbush L J, Im J. 2010.Synergistic use of QuickBird multispectral imagery and LiDAR data for object-based forest species classification. Remote Sensing of Environment, 114(6):1141-1154.
Kim M, Madden M, Warner T. 2008.Estimation of optimal image object size for the segmentation of forest stands with multispectral IKONOS imagery.Object-Based Image Analysis. Berlin: SpringerVerlag.
Koukoulas S, Blackburn G A.2004. Quantifying the spatial properties of forest canopy gaps using LiDAR imagery and GIS. International Journal of Remote Sensing, 25(15):3049-3072.
Koukoulas S, Blackburn G A. 2005. Spatial relationships between tree species and gap characteristics in broad-leaved deciduous woodland. Journal of Vegetation Science, 16(5):587-596.
Kupfer J A, Runkle J R. 1996. Early gap successional pathways in aFagus-Acer, forest preserve: pattern and determinants. Journal of Vegetation Science, 7(7):247-256.
Liu Y, Bian L, Meng Y,etal. 2012.Discrepancy measures for selecting optimal combination of parameter values in object-based image analysis. Isprs Journal of Photogrammetry amp; Remote Sensing, 68(1):144-156.
Malahlela O, Cho M A, Mutanga O.2014. Mapping canopy gaps in an indigenous subtropical coastal forest using high-resolution WorldView-2 data. International Journal of Remote Sensing, 35(17):6397-6417.
Möller M, Lymburner L, Volk M. 2007.The comparison index: a tool for assessing the accuracy of image segmentation. International Journal of Applied Earth Observation amp; Geoinformation, 9(3):311-321.
Negrón-Juárez R I, Chambers J Q, Marra D M,etal. 2011. Detection of subpixel treefall gaps with Landsat imagery in Central Amazon forests. Remote Sensing of Environment, 115(12):3322-3328.
Ørka H O, Gobakken T, Nsset E,etal. 2012. Simultaneously acquired airborne laser scanning and multispectral imagery for individual tree species identification. Canadian Journal of Remote Sensing,38(2):125-138.
St-Onge B, Vepakomma U, Sénécal J F,etal. 2014. Canopy gap detection and analysis with airborne laser scanning∥Forestry applications of airborne laser scanning. Berlin:Springer Netherlands.
Suarez A V, Pfennig K S, Robinson S K. 1997. Nesting success of a disturbance-dependent songbird on different kinds of edges. Conservation Biology, 11(4):928-935.
Vapnik V N. 2000. The nature of statistical learning theory. Berlin: Springer Verlag.
Vepakomma U, St-Onge B, Kneeshaw D. 2011. Boreal forest height growth response to canopy gap openings-an assessment with multi-temporal LiDAR data. Ecological Applications A Publication of the Ecological Society of America, 21: 99-121.
Vepakomma B U, Stonge B, Kneeshaw D. 2008. Spatially explicit characterization of boreal forest gap dynamics using multi-temporal LiDAR data. Remote Sensing of Environment, 112(5):2326-2340.
Wang L, Sousa W P, Gong P. 2004. Integration of object-based and pixel-based classification for mapping mangroves with IKONOS imagery. International Journal of Remote Sensing, 25(24):5655-5668.
Yang J, Jones T, Caspersen J,etal.2015a. Object-based canopy gap segmentation and classification: quantifying the pros and cons of integrating optical and LiDAR data. Remote Sensing, 7(12):15917-15932.
Yang J, He Y, Weng Q. 2015b.An automated method to parameterize segmentation scale by enhancing intrasegment homogeneity and intersegment heterogeneity. IEEE Geoscience amp; Remote Sensing Letters, 12(6):1282-1286.
Zhan Q, Molenaar M, Tempfli K,etal. 2007. Quality assessment for geo-spatial objects derived from remotely sensed data. International Journal of Remote Sensing, 26(14):2953-2974.
Zhang K. 2008. Identification of gaps in mangrove forests with airborne LiDAR. Remote Sensing of Environment, 112(5):2309-2325.
(责任编辑 石红青)
Object-BasedAutomaticRecognitionforForestGapsUsingAerialImageandLiDARData
Mao Xuegang Hou Jiyu Fan Wenyi
(SchoolofForestry,NortheastForestryUniversityHarbin150040)
【Objective】 Identification of forest canopy gap is a prerequisite to quantify the forest gap characteristics (such as size, shape and dynamics), and a basis for further understanding the complex structural forest species regeneration and studying the understory species diversity, in order to study the active and passive remote sensing method for forest gap recognition. This study could provide further technical support for the quantitative analysis of forest gap features.【Method】 In this study, true color aerial orthophoto (0.2 m) and airborne LiDAR (3.7 points·m-2) were used as the active and passive remote sensing data sources, respectively, and northeast typical natural secondary forest-Mao’ershan experimental forest farm Donglin industry zone was selected as the study area for the object oriented gap recognition. Three segmentation schemes (based on aerial image segmentation, LiDAR segmentation, collaboration of aerial image and LiDAR segmentation) were adopted when processing object oriented classification and each segmentation scheme was divided to 10 scales (10-100, step size 10) to find the optimal segmentation scale parameter. Based on the optimal segmentation result, the support vector machine classifier (SVM) with spectral features of aerial image, height features extracted from LiDAR data were used to identify the forest gap.【Result】 The optimal scale was 20, and the ED3modifiedvalue of LiDAR data segmentation (0.52±0.11) was always lower than that of aerial image segmentation (0.58±0.07) or collaboration of aerial image and that of LiDAR segmentation (0.58±0.07) over all scales (10-100). Based on LiDAR data segmentation and its optimal segmentation scale of 20, the classification accuracy obtained from integration of spectral (active)+height (passive) characteristic increased 36.71% and 8.17%, respectively, comparing with the classification accuracy obtained from single characteristic of spectral feature and height feature.【Conclusion】 Comparing the three segmentation schemes, the result of segmentation based on LiDAR data was the best; the classification accuracy based on integration of active and passive remote sensing was the highest (OA=87.73%, Kappa=0.81).
forest gap; scale segmentation; classification feature; LiDAR; aerial image; CHM; support vector machine(SVM)
10.11707/j.1001-7488.20171111
2016-10-21;
2017-02-08。
国家自然科学基金项目(31300533)。
*范文义为通讯作者。
S771.8
A
1001-7488(2017)11-0094-10
