基于微波探测的植株对靶精确施药机研制
2017-12-15汪小志吴东明
汪小志,吴东明
(1.南昌大学,南昌 330031;2.焦作师范高等专科学校,河南 焦作 454000;3.南昌工学院,南昌 330108)
基于微波探测的植株对靶精确施药机研制
汪小志1,3,吴东明2
(1.南昌大学,南昌 330031;2.焦作师范高等专科学校,河南 焦作 454000;3.南昌工学院,南昌 330108)
为了提高施药的精度和效率,将微波探测技术引入到了精确施药机的设计过程中,设计了一种具有自主定位能力的高精度施药机。该装置通过微波传感器获得植株标靶靶向信息和距离信息,通过速度传感器获得机器人移动速度,将两者综合处理后,输出控制信号,控制电磁阀的启闭,实现精确对靶施药。为了验证施药机的精确施药效果,采用调频连续三角波微波传感器,对同一植株靶,在不同实验条件下,对分辨率、探测范围与探测距离进行了实验。实验结果表明:以植株作为探测靶标时,探测分辨率与植株间距具有相关性,光照强度、温度和湿度对探测效果的影响不大。微波探测对环境的适应能力较强,因此可以将微波探测技术应用到高精度施药机的设计中,提高施药机施药的精确性和效率。
微波探测;精确对靶;喷雾施药;传感器;电磁阀
0 引言
病虫害防治是农业生产中非常重要的环节,农药的利用率和病虫害的防治效果主要受农药、施药技术和作业机械影响。目前,我国农药生产技术的水平已经处于世界领先地位,但施药器械的研究和施药技术依然相对落后,农药利用率低,对环境污染较为严重。从20世纪80年代开始,我国对精确施药技术展开了研究,进入21世纪后,精确对靶施药技术有了突破性的进展。精确对靶技术可以有效地对植株进行选择性施药,提高农药在植株上的附着,降低农药在非靶区域的沉降,从而获得较好的施药效果,降低成本,减少环境污染。
目前,精确对靶定位传感技术中使用最多的是红外线探测和微波探测:红外线探测对于植株对靶受环境因素影响较大,抗干扰的能力较弱,测量的距离较短,该技术的应用受到了限制;微波探测是一种新型的探测技术,相对于红外线探测技术,其抗干扰能力较强,不受热、噪音、湿度、气流尘埃等影响,对环境的适应能力较强,且测距较强。将微波测距应用在施药对靶方面的研究并不多,因此微波测距植株对靶的研究及对高精度施药技术和施药器械的设计具有重要的意义。
1 微波对靶探测施药机总体设计
本设计的微波对靶探测施药机共有8部分组成,包括微波传感模块、速度传感模块、电气控制模块、药箱和药泵、电磁阀、低药量喷头、风送机和动力输出模块,将这些部分安装到机器人移动装置上,便可以设计出基于微波探测的高精度施药机,其设计框架如图1所示。
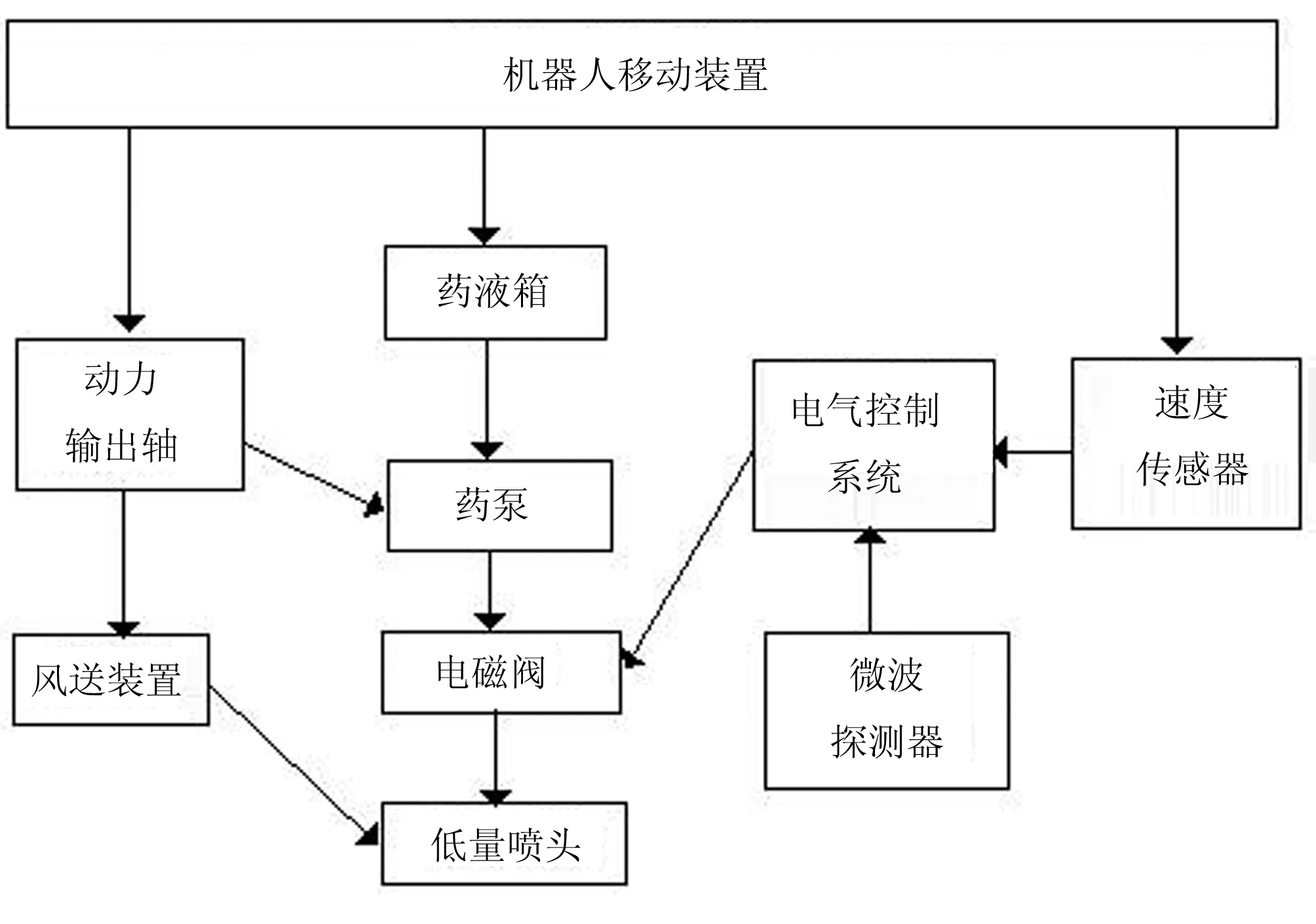
图1 微波探测施药系统结构框架图
微波探测施药系统分为4部分,包括行驶装置部分、电气控制部分、供药部分和送风部分,其电气控制部分为设计的核心。行驶装置采用自主导航模式的移动机器人,可对垄行进行自主准确定位;供药部分由药泵和药箱组成;送风装置主要是对喷出的药物进行雾化,提高施药效果。电气控制部分主要是实现微波对靶和速度检测,通过微波传感器获得植株标靶信息,并得到距离信息,通过速度传感器获得机器人移动速度,将两者传送给系统处理器;通过综合处理后,输出控制信号,控制电磁阀的启闭,实现精确对靶施药。
图2为微波对靶的电器控制系统的设计框架。硬件控制部分主要分为5个部分,包括核心控制器、信号调节器、电源模块、控制输出模块和人机交互模块。微波探测器将信号调理后,输入到计数器中,通过单片机计算1个周期内的同步信号,从而得到施药机和植株靶的距离;速度信号也通过计数器和单片机计算出来,综合两方面的信息后,发出控制信号,实现对喷雾的控制。

图2 微波对靶探测电气控制系统硬件电路框图
图3为施药机的机械结构图。施药机的结构主要为信息获取、信息处理及末端执行3大部分。信息的获取可以通过视觉系统和测试机构实现,信息处理主要依靠PC机上位机和单片机实现,末端执行部分由横移机构及喷施器件构成。信息的获取主要是植株靶的距离和方向信息,两者在控制上相互独立,但是控制的结果是相关的。

图3 施药机机械结构图
2 植株精确对靶微波探测原理
植物的精确对靶采用微波探测的原理实现。假设雷达发射的功率是Pt,天线的增益是Gt,则在自由空间进行工作时,在与雷达天线相距R处的功率密度可以表示为
(1)
当目标植株被电磁波照射时会产生散射回波,散射功率的大小与功率密度S1及植株的特性有关。假设目标植株的散射截面积σ表示散射特性,目标可以将功率无损耗的辐射出去,可以得到二次辐射功率为
(2)
假设P2表示均匀辐射,接收天线收到的回波的功率密度为
(3)
假设接收天线的有效截面积为Ar,则回波功率为
(4)
根据天线理论,有效面积Ar和天线增益G的关系为
(5)
其中,λ表示所使用的波长,于是接收的回波功率可以写成
(6)
(7)
反射功率在经过双倍的距离路程后,能力衰减较大,当Pr与Simin相等时,微波雷达才能可靠的发现目标,其关系为
(8)
或
(9)
(10)
利用雷达测距方程,采用三角波信号作为微波调制信号,反射信号与发射信号的形状相同,只是在时间上有一个延迟Δt,其计算的表达式为
Δt=2R/c
(11)
其中,c表示光速。根据三角关系可得
(12)
其中,T表示三角波调制的周期;ΔF表示调制带宽,则目标距离R的值为
(13)
由此可以看出:目标植株距离R与输出信号的频率为正比。
3 微波探测植株对靶精确施药机实验
为了测试施药机微波探测精确对靶的效果,本次研究采用中心频率为10.6GHz的连续调频三角波微波传感器,对植株的微波对靶进行了测试,输出信号通过后接示波器输出。本次测试主要针对植株间距、光照强度、温度和湿度等参量,对微波对靶的影响因素进行了深入的分析研究。对靶实验的操作如图4所示。

图4 对靶试验操作示意图
在实验操作时,将探头固定,y轴为探头的中心轴线,植株沿着y轴的正方向移动,感应区区间记作(y),与y轴垂直的直线作为x轴,探头沿着x轴方向移动。
3.1 植株间距对探测效果的影响
微波探测器发射天线为喇叭口天线,其发射出的信号为类似立体椎体形状。由于植株漫发射存在放大信号的延迟,因此探测器探测到的无目标区间要比实际的植株间距要小。假设微波探测器的分辨率为δ,实际的植株间距为d,微波探测的区间为d',则
(14)
对微波探测器的移动速度进行固定,调节植株间距分别为30、20、10cm,然后进行微波植株对靶探测实验,植株间距分别为2、4、6cm,对分辨率进行计算,最终得到了如表1所示的结果。
表1 不同植株间距微波探测分辨率计算结果

Table 1 Calculation results of microwave detection resolution of different plant spacing
由表1可以看出:当植株间距降低到一定值时,探测器的分辨率降低为0,从而无法区分个体植株,植株间距与分辨率存在正相关,对靶植株距离探测器越高,分辨率越高。
3.2 自然光照强度对探测效果的影响
自然光照的强度可以用太阳辐射的等级来表示,太阳辐射等级可以通过太阳高度角计算得到,选择不同的光照强度对微波对靶进行测试,通过测试得到了如图5所示的结果。

图5 不同光照条件下微波探测范围和距离测试结果
图5中,R1和R2分别表示两种不同的光照强度。由图5曲线结果可以看出:在不同光照条件下,对于同植株,同一物体在不同光照强度下的探测效果影响并不明显。实验结果表明:光照对微波探测的影响不大,施药机可以在不同的光照条件下,完成植株的对靶。
3.3 温度和湿度对微波探测的影响
在自然光照条件下,利用空气调节和加湿的方式,对室内的温度和湿度进行调节,测试不同温度和湿度条件下的施药机植株对靶效果,在相同的光照条件下,将温度分别调节为36、26、16℃,通过实验测试,得到了如图6所示的结果。
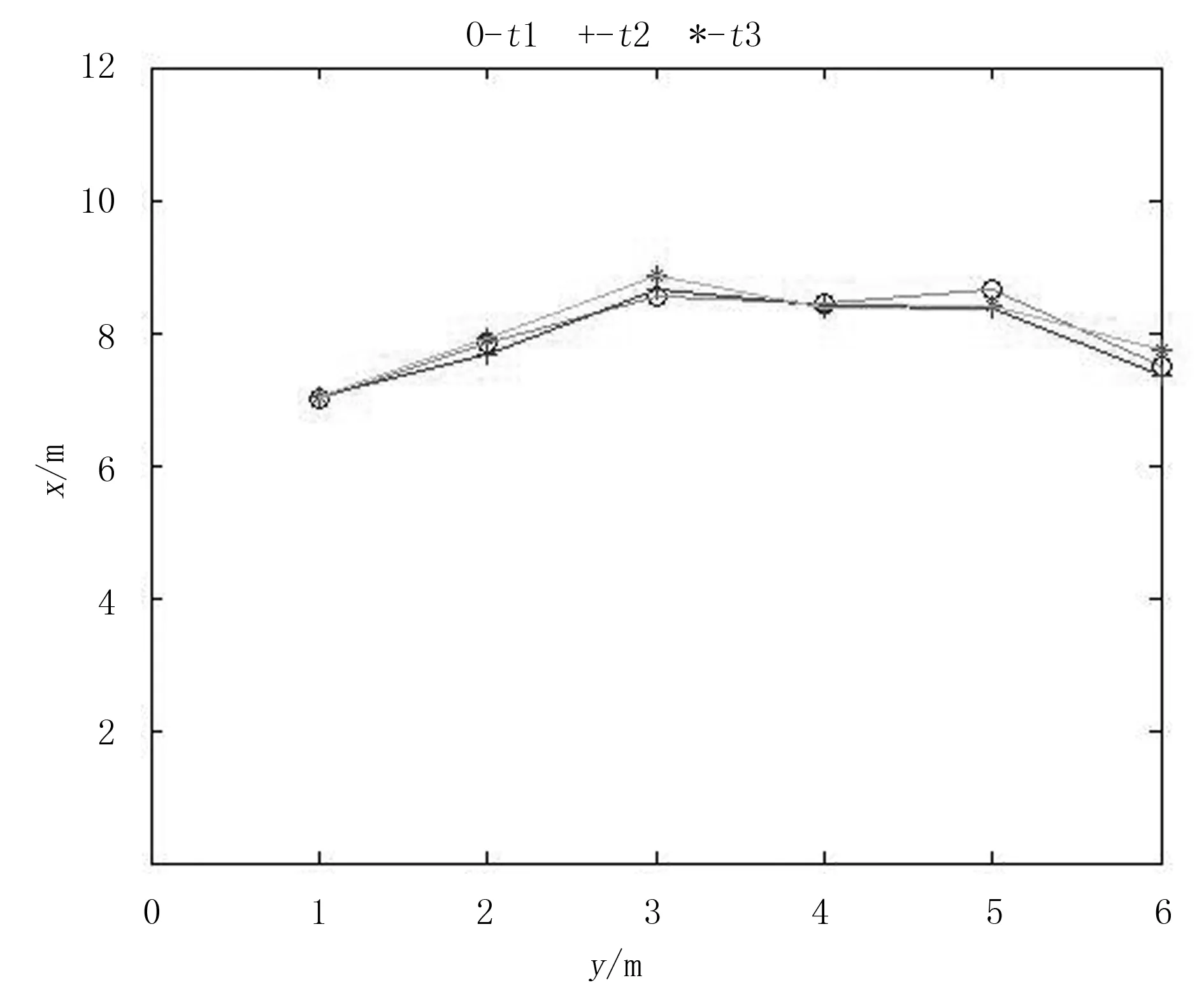
图6 不同温度条件下微波探测范围和距离测试结果
图6中,t1、t2和t3分别表示3种不同的温度。由图6曲线结果可以看出:在不同温度条件下,对于同植株,在相同的光照条件下,不同温度对微波探测的效果影响也不明显。在相同自然光照强度、相同温度t条件下,继续对不同高湿度的微波对靶探测效果进行测试,将湿度分别设置90%、70%和50%,通过计算得到了如图7所示的测试结果。

图7 不同湿度条件下微波探测范围和距离测试结果
图7中,M1、M2和M3分别表示3种不同的湿度。由图7曲线结果可以看出:在不同湿度条件下,对于同植株,在相同的光照和温度条件下,不同湿度对微波探测的效果影响也不明显。综合上述测试可以发现,外部环境对施药机的微波探测效果影响不大,从而验证了施药机对环境的适应能力较强,对靶效果较好。
4 结论
利用微波探测测距和定位技术,采用传感器和单片机设计了一种高效的施药机。该施药机具有自主定位能力,对环境能力的适应性较强。该装置通过微波传感器可以有效地获得植株标靶靶向信息和距离信息,通过速度传感器可以获得机器人移动速度,将两者综合处理后可以决定是否施药和施药量。对施药机进行了实验测试,测试使用的调频连续三角波微波传感器,对不同实验条件下分辨率、探测范围与探测距离进行了实验。由测试实验结果发现:外部环境对施药机的微波探测效果影响不大,施药机对环境的适应能力非常强,可以有效地提高施药的精度和效率。
[1] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[2] 姬江涛,郑治华,杜蒙蒙.农业机器人的发展现状及趋势[J].农机化研究,2014,36(12):1-4.
[3] 乔永亮,何东键,赵川源,等.基于多光谱图像和SVM的玉米田间杂草识别[J].农机化研究,2013,35(8):30-34.
[4] 姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[5] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报,2014,34(7): 1-7.
[6] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41 (7):368-370.
[7] 傅锡敏,薛新宇.基于我国施药技术与装备现状的发展思路[J].中国农机化,2008(6):72-76.
[8] 傅泽田,祁力钧,王俊红.精确施药拉术研究进展与对策[J].农业机械学报,2007,38(1):189-192.
[9] 郭辉,韩长杰.精确施药技术的研究与应用现状[J].农业技术与装备,2009(4):42-46.
[10] 吕太国.静电喷雾系统特性研究[J].农机化研究,2009,31(5):54-70.
[11] 燕明德,贾卫东,张斌,等.国内外静电喷雾施药技术及机具研究[J].农业机械,2008(8):53-54.
[12] 刘金龙,丁为民,邓巍.果园对靶喷雾红外探测系统的设计与试验[J].江苏农业科学,2012,40(12):370-372.
[13] 李丽,李恒,何雄奎.红外靶标自动探测器的研制及试验[J].农业工程学报,2012,28(12):159-162.
[14] 裴文超,陈树人,尹东富.基于DSP和单片机的实时对靶喷施除草系统[J].农机化研究,2012,34(1):149-153.
[15] 张俊雄,马锃宏,李伟,等.基于土壤基质的播种精度检测试验研究[J].农业机械学报,2012,43(12):62-66.
[16] 马锃宏,李南,王汉斌,等.温室株间电驱锄草控制系统设计与试验[J].农业机械学报,2015,46(1):89-93.
[17] 张二鹏,马锃宏,耿长兴,等.温室悬挂喷施机跨垄作业控制系统设计[J].中国农业大学学报,2013,18(6): 170-174.
[18] 马锃宏,李南,李涛,等.钵体苗带式供苗移栽机的设计与试验[J].中国农业大学学报,2015,20(3):216-222.
[19] 张春龙,黄小龙,刘卫东,等.苗间锄草机器人信息获取方法的研究[J].农业工程学报,2012,28(9):142- 146.
[20] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报, 2013,29(10):12-18.
[21] 朱凤武,于丰华,邹丽娜,等.农业机器人研究现状及发展趋势[J].农业工程,2013,3(6):10-13.
[22] 吴岩,杜立宇,高明和,等.农业面源污染现状及其防治措施[J].农业环境与发展.2011(1):64-67.
[23] 杨慧,刘立晶,刘忠军,等.我国农田化肥施用现状分析及建议[J].农机化研究,2014,36(9):260-264.
[24] 张霞,蔡宗寿,李欢.我国化肥生产能源消费现状分析[J].现代化工,2014,34(10):12-15.
[25] 付丽霞,李云乐.农业面源污染的现状、问题及对策探析[J].食品安全质量检测学报,2014,5(7):2285- 2289.
[26] 栾江,仇焕广,井月,等.我国化肥施用量持续增长的原因分解及趋势预测[J].自然资源学报,2013, 28(11):1869-1878.
[27] 沈德军.农作物叶面施肥的意义、机理及技术要点[J].安徽农学通报,2012,18(12):111-112.
[28] 鱼彩彦.叶面施肥技术在农业生产中的应用[J].农业与技术,2013,33(12):30.
Microwave Detection Plants Based on Target Precision Spraying Machine
Wang Xiaozhi1,3, Wu Dongming2
(1.Nanchang University, Nanchang 330031, China;2.Jiaozuo Teachers College, Jiaozuo 454000, China;3.Nanchang Institute of Science & Technology, Nanchang 330108, China)
With the development of mobile communication technology, array technology has been widely used, and formed the research field of smart antenna, which has adaptive and anti-jamming capability of linear array antenna is a hot research. Based on this, a field with the auto disturbance rejection ability of the field to follow the car control system, and the design of the car's mechanical and transmission structure. The vehicle can be used to control the signal with simple and flexible operation, so as to obtain the ideal spatial directional beam, and make full use of the user's signal, and delete or inhibit the interference signal. Design of experiment of tracing robot prototype, and the design of a linear array of composed of N number of antenna elements, found by testing, car after external interference torque, system of horizontal and vertical channels can still good follow their respective set value, has better robustness, can guarantee in the field of complex environment and signal interference, with high working efficiency and precision.
linear array; follow the car; directional beam; robustness; adaptive; anti jamming
2015-12-04
国家自然科学基金青年科学基金项目(41505015)
汪小志(1981-),女,武汉人,副教授,博士研究生,(E-mail)fiberhome@126.com。
S491;TN958
A
1003-188X(2017)01-0127-05
