类壁虎农田信息采集机器人运动控制系统的研究
2017-12-15傅瑶
傅 瑶
(重庆工业职业技术学院,重庆 401120)
类壁虎农田信息采集机器人运动控制系统的研究
傅 瑶
(重庆工业职业技术学院,重庆 401120)
机器人作为引领未来的高科技产品,在各个行业的作用非常明显,发展前景十分广阔。类壁虎机器人是特种机器人的一个重要分支,具有高灵活性和机动性,可替代人完成重复、繁琐或者危险的劳动,不但可以对大型机器设备零部件进行探伤检测和灾后搜救工作,也可以应用于信息收集、军事、深山探险等领域。以DSP智能控制平台为核心模板,通过研究类壁虎机器人运动规划与控制系统,对农田信息进行实时采集,并根据农田作物的发病情况进行预警。实验表明:本文设计的农田信息采集机器人具有智能化程度高、控制精度高、灵活性大、可靠性强及开发周期短等显著特点,应用前景十分广阔。
类壁虎;DSP;农田信息采集机器人;运动控制
0 引言
目前,美国、日本、德国、韩国等国纷纷推出与发展新一代机器人相关的新战略,希望借助机器人自主化、信息化、网络化技术推进再工业化和产业数据化,提高国际竞争力。我国提出的“中国制造2025”计划,将会加快智能化制造,各省市都将强化智能机器人制造的产业布局,过去5年,中国机器人市场年均增长36%,机器人市场需求大。
壁虎足垫和脚趾下的鳞上密布着上百万根一排一排的、成束的、同人类头发丝粗细的象绒毛一样微绒毛,如同一只只弯形的小钩,使其能够轻而易举地抓牢物体,并可以在墙壁甚至玻璃上爬行。类壁虎机器人模拟壁虎的移动方式可以在三维空间轻松、无障碍的爬行。本文主要基于DSP嵌入式开发平台,模拟仿照壁虎的运动行为和爬行特点,分析类壁虎机器人运动学原理,研究其运动控制系统。
1 信息采集系统
类壁虎农田信息采集机器人主要依靠射频通讯和无线WIFI进行农作物信息采集,其信息采集系统主要依靠无线网络双CCD高清摄像机对农作物的生长及健康情况进行回传,并由DSP与ARM控制系统进行迭代学习与分析。该系统可根据具体需要,搭载多种信息传感器,收集农作物不同部位的生长信息或者生长环境的温湿度信息,由嵌入式控制系统进行数据分析与处理,并最终传回电脑终端控制站,为农民提供高效有用的技术指导,以提高种植效益。信息采集系统结构图如图1所示。
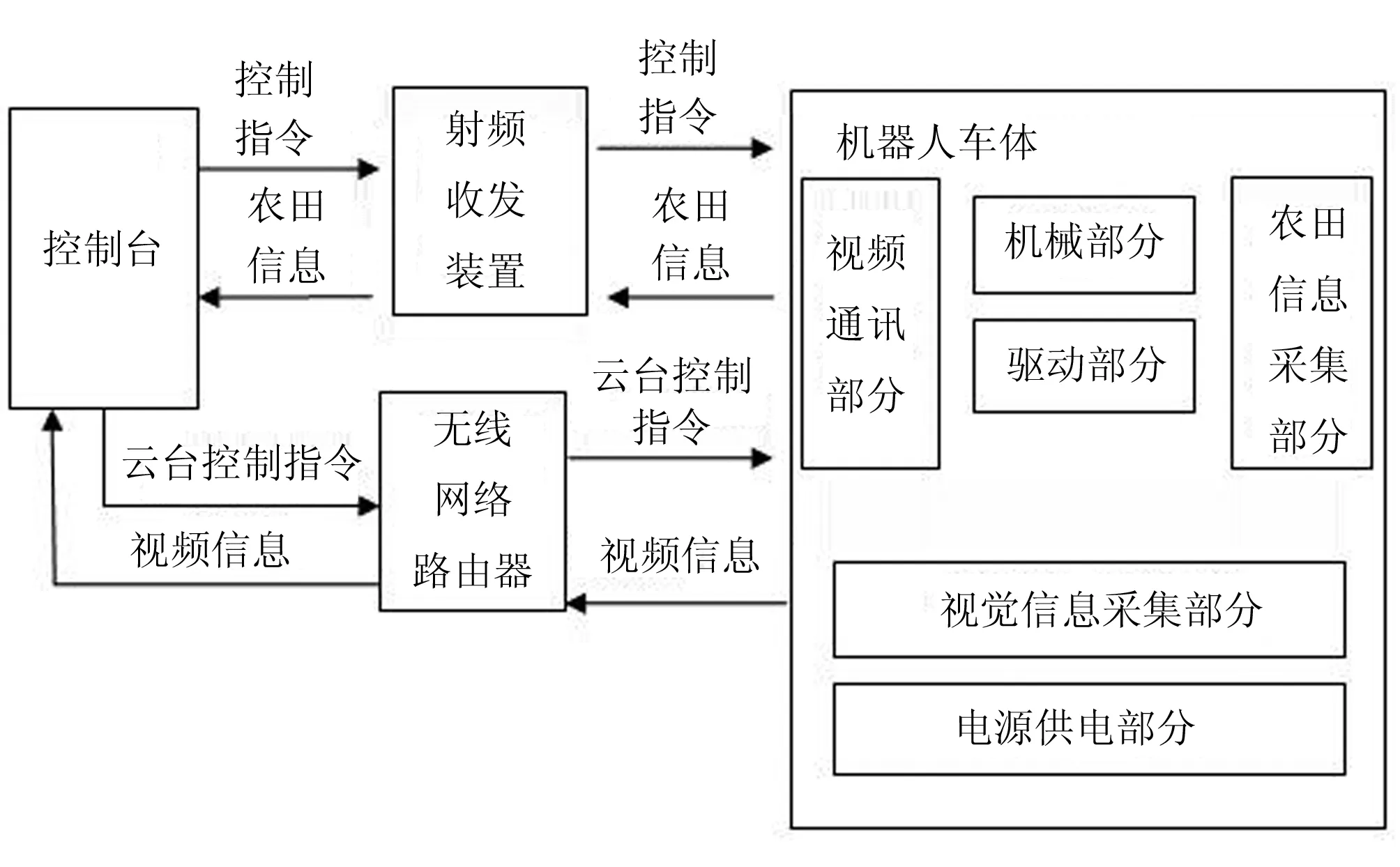
图1 信息采集系统框架图
2 整体结构和运动学分析
通过观察研究壁虎的身体结构和爬行规则及其在各种平面运动的规律,研究和开发了一种类壁虎的农田信息采集系统,在ADAMS仿真软件中的模型构造如图2所示。
2.1 机器人结构设计
本文设计的农田信息采集机器人机械结构对称,根据平衡学原理设置4条腿,前进方向与腿所在的平面呈90°垂直。由于其在直线运动的过程中机架和电机之间协调起来比较麻烦,因此给每条腿配备3个旋转自由度。其中,电机1负责机器人各个脚的抬起和放下动作,给机器人前进提供动力;电机2可以根据机器人的需要进行平面内90°的转弯动作;电机3主要控制机器人运动过程中脚掌在平面内的定位。在设计整体结构的时候,刻意增大3个电机之间的水平距离,最大限度地减少电机对机器人行进的干扰。传感器与机器人的4条腿相连,用来检测行进过程中路面的平整状况,然后将信息反馈到DSP智能控制系统中,实时根据路况调整行走方式,避开前方障碍物,使其在爬行过程中自主性比较强,提高其适应能力。
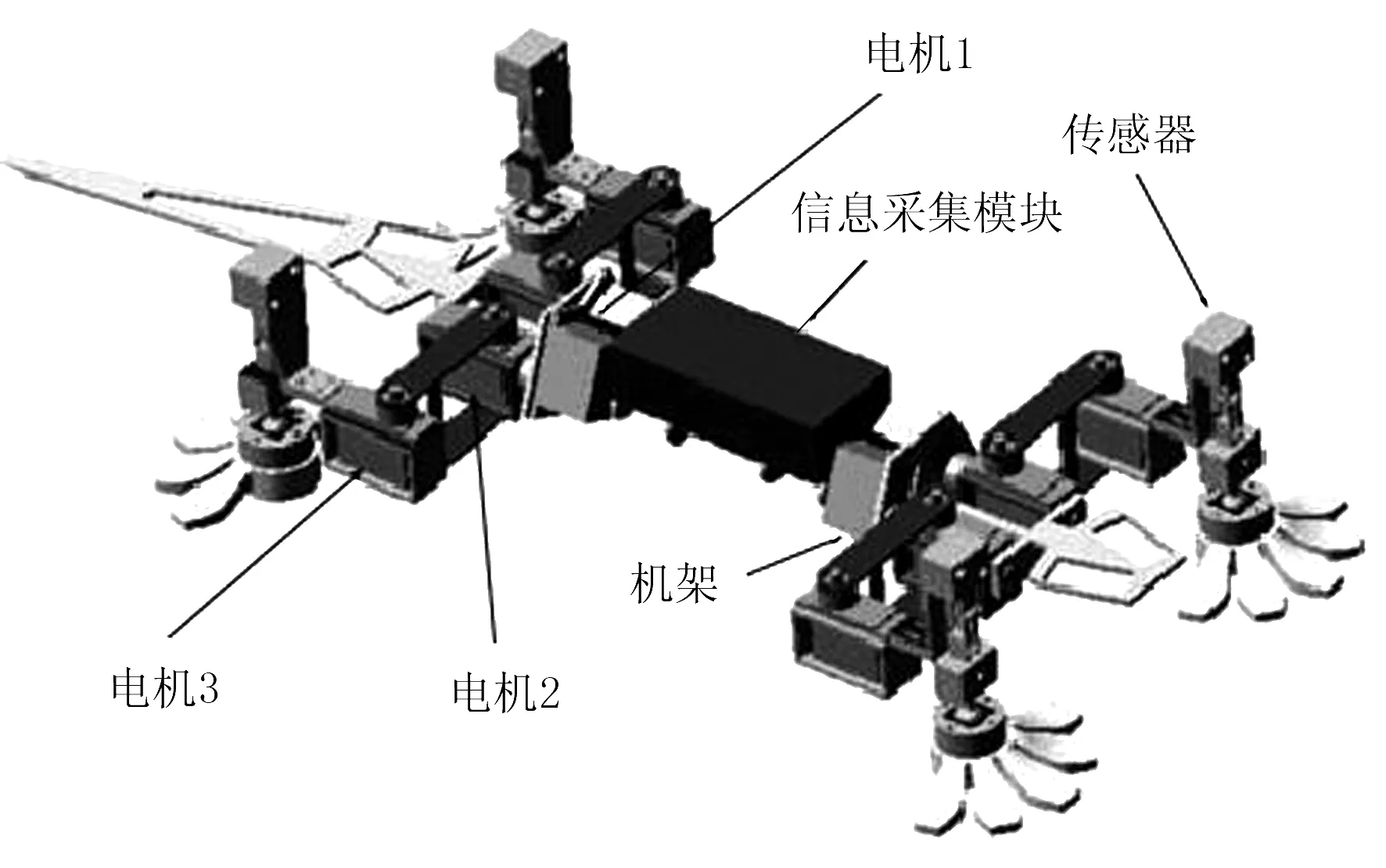
图2 农田信息采集机器人的结构模型
2.2 机器人运动学分析
类壁虎农田信息采集机器人是一个完整的系统,其运动过程比较复杂,整个运动过程中满足方程:
(1)
其中,i、j为正整数;R为关联系数;g为外力;a为铰链作用。
机器人在运动过程中,常常需要经过松软和较硬的地面,而在不同的地面上,机器人腿掌的受力情况不同。一般通过力学传感器收集信息后,控制系统根据路面情况需要对驱动电机作出调整,使其可以在各类不同的地面顺利前行。
针对该机器人的左后脚,分析其在软、硬地面的运动力学。该足端脚掌在硬地面的受力情况如图3所示。
根据力学平衡原理有
R=Q
(2)
(3)
T=Fqr
(4)
Fd=Fq-Ff=μQ-fQ
(5)
其中,Q为脚掌对地面的压力;R为地面对脚掌的支撑力;Ff和Fq为脚掌前后的摩擦力;r为脚掌触地半径。
足端脚掌在软地面的受力情况如图4所示。

图3 左后方足端脚掌在硬地面的受力示意图
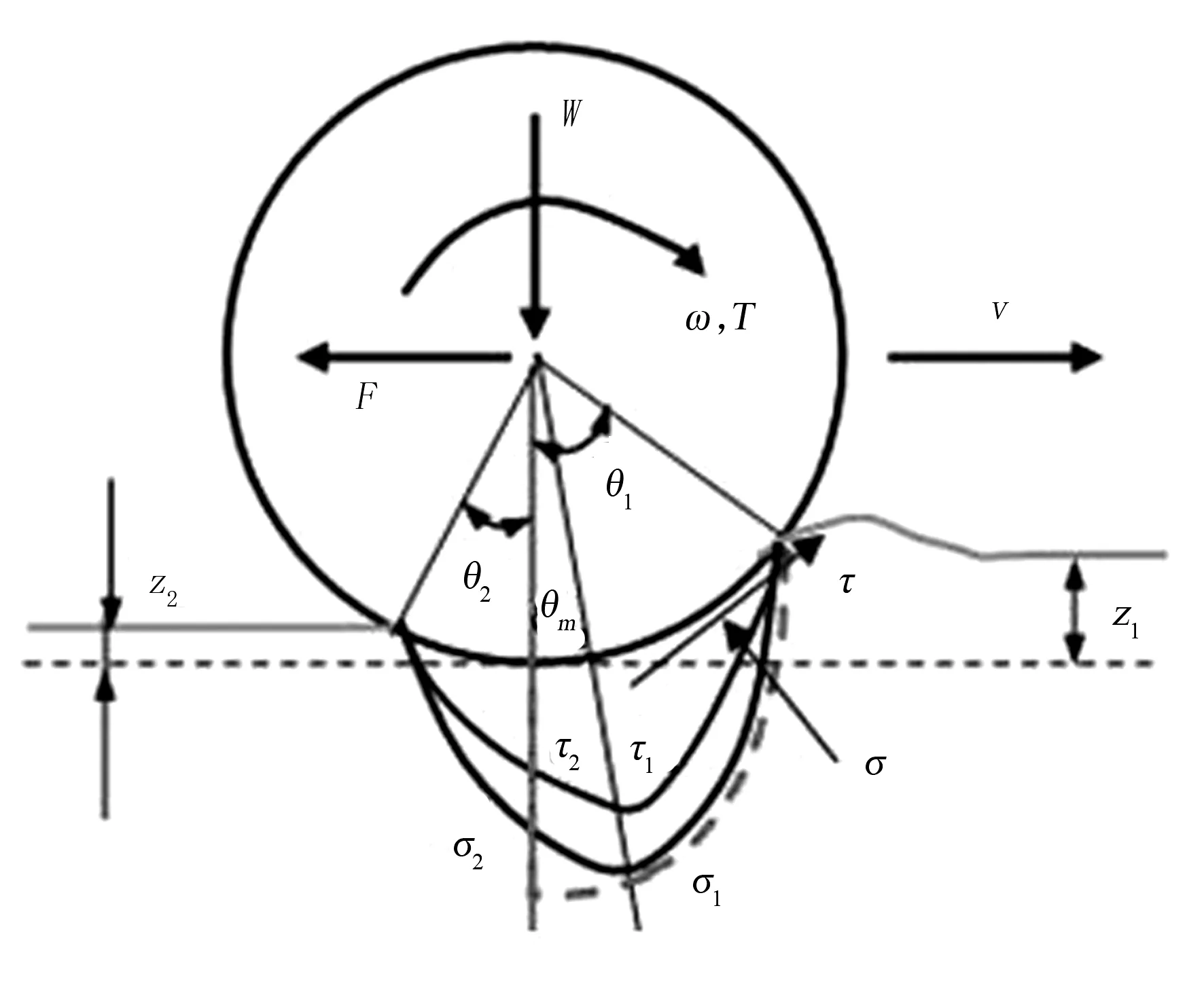
图4 足端脚掌在软地面的受力情况示意图
由图4得
(6)
(7)
Fd=FH-Rc
(8)
(9)
(10)
其中,n=1,2…;0≤θ≤180;W为软地面对脚掌的支撑力。
根据上述执行机构方程式的变形换算,可以得到该脚掌在三维空间的表达式为
(11)
其中,L1、L2分别为力学传感器检测到左右与壁虎目标之间的距离。上述变换式表示了末段执行器三维空间力的传递关系,主要研究脚掌位置变换与部件转角之间的关系,并求出其在操作空间的位移传递关系。
3 控制系统的硬件设计
该机器人控制系统中,机体运动依靠3个直流电机驱动,机器人以TMS320F2812为控制系统的核心。该系统主要包括电源电路、电源检测电路、A/D转换电路、复位电路、传感器检测电路及电机驱动电路等部分,整体框架如图5所示。

图5 控制系统整体框架图
在控制系统中,3个电机采用独立的驱动方式,即3个电机的运动控制信号不同,可以减少各个电机之间的相互干扰,加大电机的控制灵活度。通过电机之间的相互配合,实时采集、处理传感器的信息,由智能控制系统协调步行足的步态规划,实现对机器人各个脚掌快速准确的位置控制。农田信息采集机器人实物如图6所示。
4 运动步态识别与规划
类壁虎农田信息采集机器人是指可以灵活地在墙面上爬行和吸附的移动式机器人,是通过长期观察壁虎身体结构和爬行规律设计出来的,机器人每条腿都可以独立控制;因采用柔软材料,机身有一定的柔性,使得其可以自如的进行转弯动作。其身体结构如图7所示。

图6 农田信息采集机器人实物图
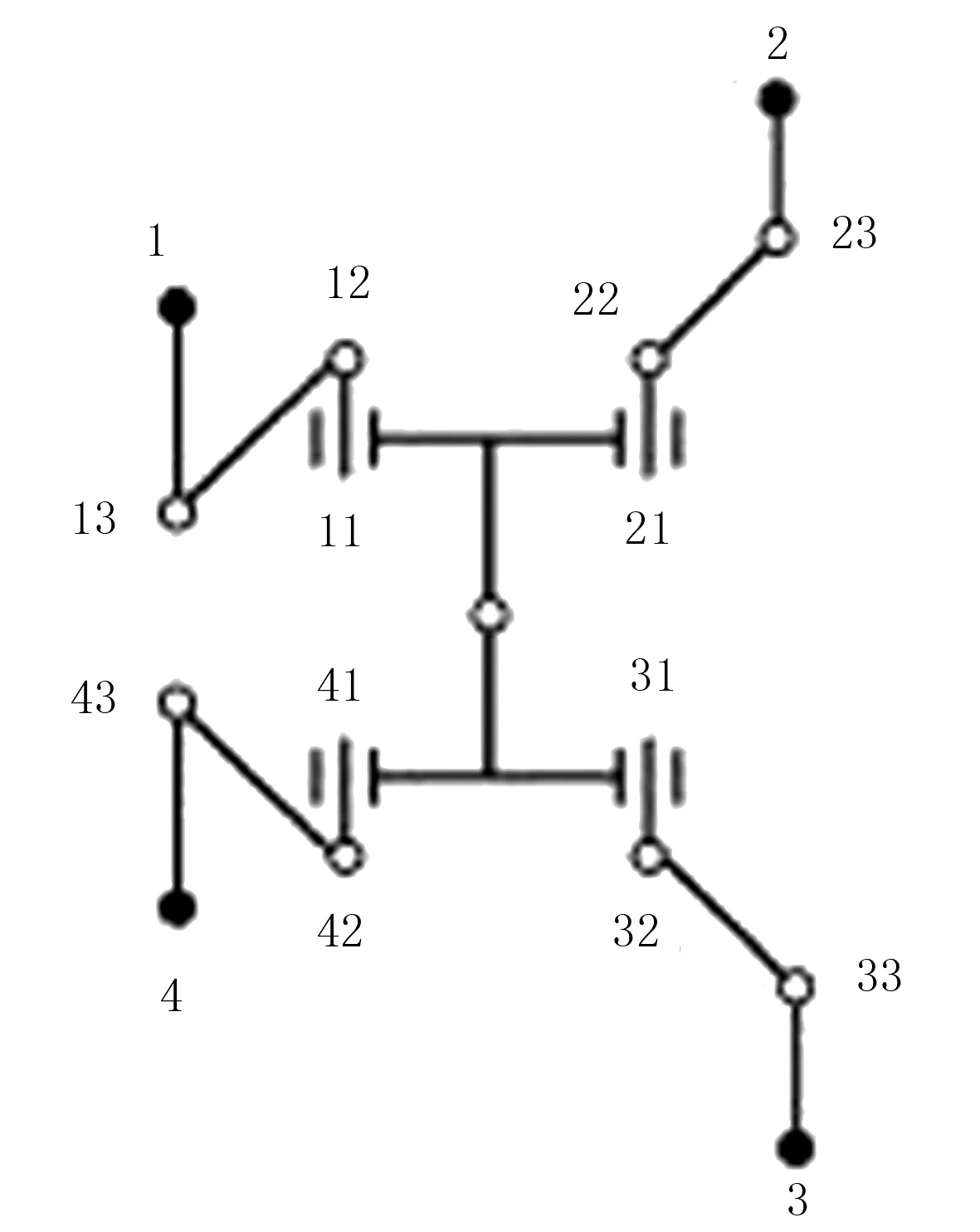
图7 类壁虎机器人身体结构图
根据大壁虎爬行时的步态,设计出类壁虎机器人的两种爬行步态:1234步态和对角线步态。1234步态是指在爬行过程中机器人的4个脚掌依次抬起放下,爬行过程中一直有3个脚掌吸附在墙面上,稳定性能较高; 对角线步态是指相对角的两个脚掌同时抬起或放下,以此做周期性的动作,此方法因吸附能力强,移动速度很快。本文设计中主要采用对角线步态。
4.1 直线行走方式
该机器人在行进过程中主要采取直线和转弯两种行走方式。类壁虎机器人直线移动示意如图8所示。
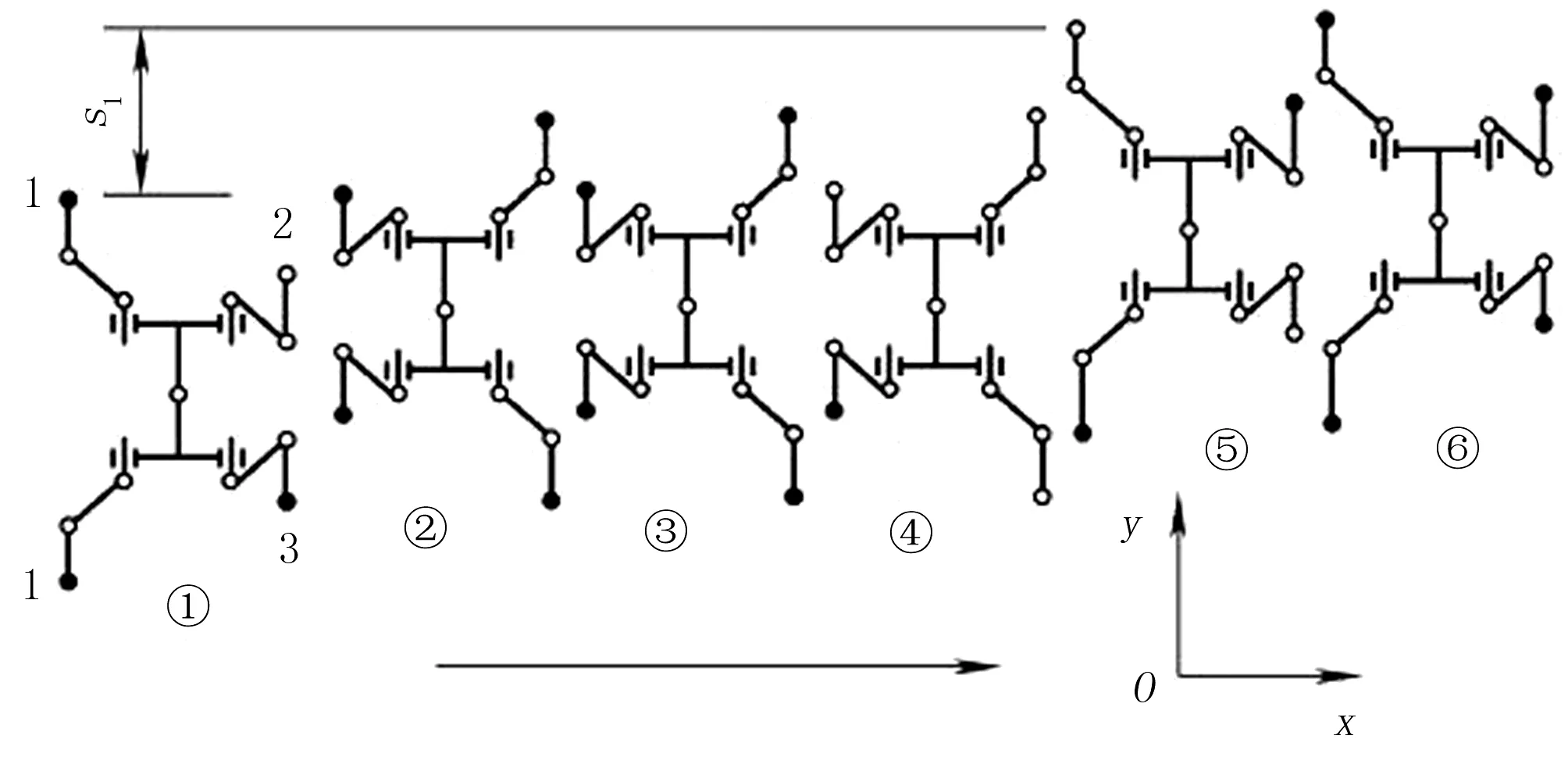
图8 机器人直线移动示意图
如图8可知:机器人在直线爬行过程中,1、3脚抬起,2、4脚吸附在壁面,以此反复的作周期性运动,即可以连续的向前沿直线移动。同理,由于机器人x和y方向的移动机构相同,类壁虎机器人也可以实现x方向的直线爬行。
4.2 转弯行走方式
在直线爬行方式上稍作改进,既可以实现机器人转弯的动作,主要是通过设置脚掌的落脚点,使其偏转一定的角度,既可以形成一个圆弧。转弯行走方式与直线行走方式移动步态的时序一样,只是角度不同。转弯行走方式如图9所示。
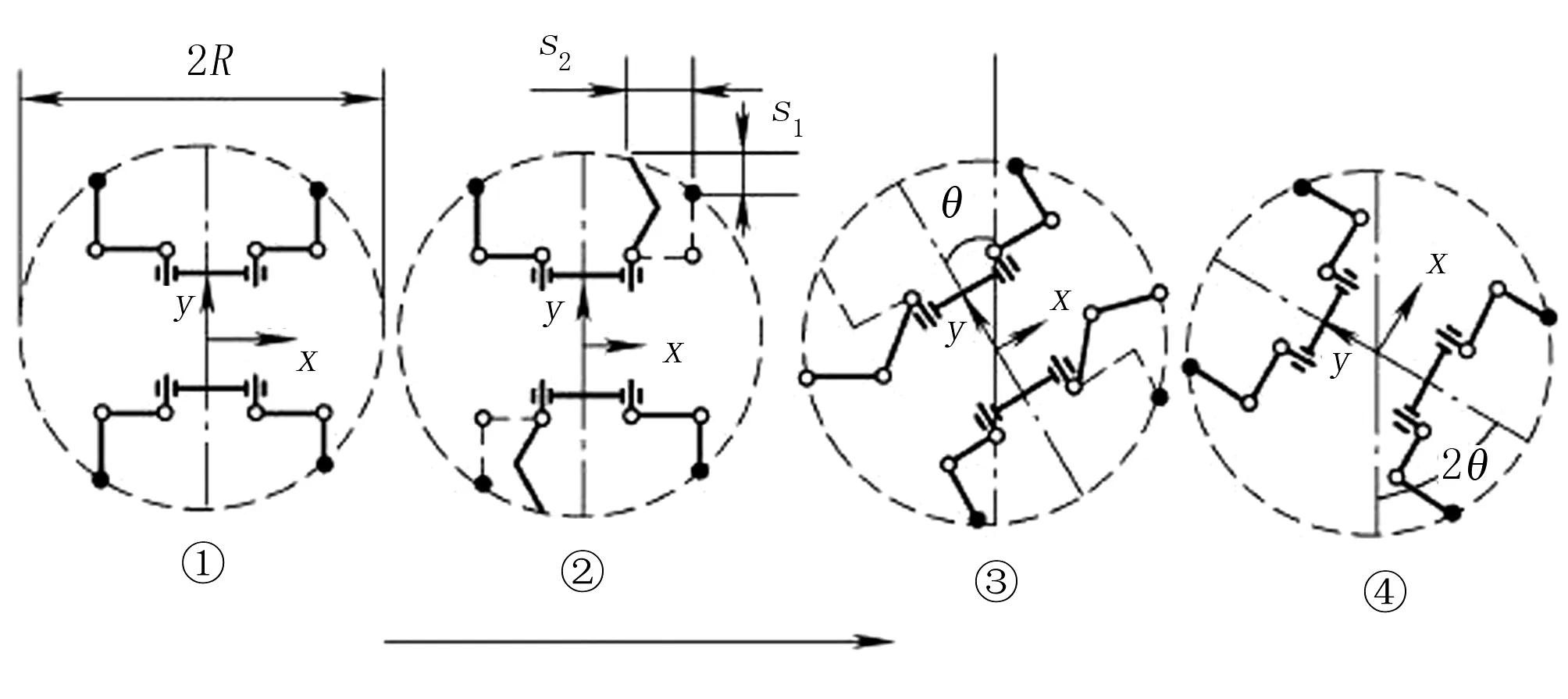
图9 机器人转弯爬行示意图
由图9可知:机器人身体转动角θ与圆弧半径R和移动位移s1和s2的关系为
(12)
5 仿真与分析
根据机器人各个部件间的相互联系,以及4个脚掌的实时状态,给各个运动部件设定相关的运动约束,根据运动学、物理力学组成机械仿真模块,运用ADAMS仿真软件进行机器人的运动仿真。本实验采用ADAMS软件实现对类壁虎机器人运动形态的仿真。机器人爬行步态仿真如图10所示。

图10 机器人爬行步态仿真图
在仿真试验中,机器人在水平墙面进行爬行,因受重力影响,机器人所受摩擦力较大,此时系统会自动调整机器人运动学方程。以机器人左右后腿的运动姿态为例,机器人的运动时间仿真函数如图11所示。
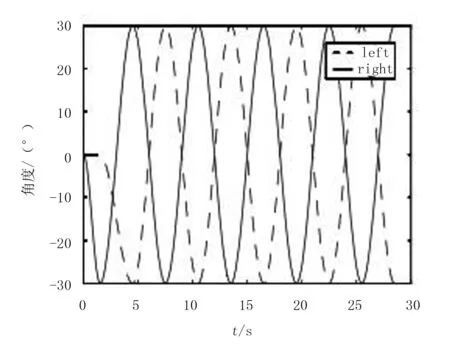
图11 机器人的运动时间仿真函数
设计研究的农田信息采集机器人在理论上满足吸附要求,机器人在上爬行时吸附力较大。但是在实际试验中,由于植物接触面积较小,会影响机器人的粘附效果,机器人的运动稳定性会受到一定程度的影响,机器人的吸附能力有待提高。实际测试表明,机器人在果树上可以实现爬行,运动过程比较稳定,各个机械部件相互无影响,证明了该机器人运动控制规划的可行性。
6 结论
通过观察壁虎的身体结构和爬行规律,以类壁虎农田信息采集机器人移动步态为基础,分析了机器人运动过程中的力学和动力学,设计了和研究了其运动控制系统。整个系统以TMS320F2812为控制核心,采用数字信号控制算法,计算能力强、速度快,节省了大量外围器件。实验表明:系统整体运行稳定,控制能力强,灵活性高,稳定性能优,易于系统的升级,为仿生机器人的研究提供了很好的研究设计方法。
[1] 孟偲,王田苗,丑武胜,等.仿壁虎机器人的步态设计与路径规划[J].机械工程学报, 2010(9):32-37.
[2] 阮鹏,俞志伟,张昊, 等.基于ADAMS的仿壁虎机器人步态规划及仿真[J].机器人, 2010(4):499-504,509.
[3] 王超炎.基于Atmega128L的类壁虎机器人运动控制系统的实现[D].南京:南京航空航天大学,2007.
[4] 代良全.类壁虎机器人步态规划研究及运动控制系统研制[D].南京:南京航空航天大学,2008.
[5] 武昌耀.基于ADAMS的大壁虎爬行的动力学仿真分析[D].南京:南京航空航天大学,2009.
[6] 顾文华.大壁虎在不同倾斜表面运动力学测试与比较分析[D].南京:南京航空航天大学,2010.
[7] 阮鹏.基于虚拟样机技术的仿壁虎机器人步态规划及运动仿真[D].南京:南京航空航天大学,2010.
[8] 张晓峰.基于MATLAB仿壁虎机器人步态规划研究与运动仿真[D].南京:南京航空航天大学,2010.
[9] 李冰.柔性仿壁虎机器人的研究[D].合肥:中国科学技术大学,2011.
[10] 于树林.柔性仿壁虎机器人控制系统研究[D].合肥:中国科学技术大学,2011.
[11] 宫俊.仿壁虎机器人运动控制:力反馈三维传感器及初步反馈行为[D].南京:南京航空航天大学,2011.
[12] 武昌耀,陶秋帆,郝青青.基于ADAMS的大壁虎地面爬行仿真[J].重庆工学院学报:自然科学版, 2009(3):28-33.
[13] 张龙,刘颖,孟偲,王田苗.基于Labview的舵机驱动爬壁机器人CPG神经网络运动控制的实现研究[J]. 机器人,2009(3):254-261.
[14] 方晔,汪小华,梅涛.仿壁虎爬壁机器人的结构及其控制系统研究[J].工业仪表与自动化装置, 2009(3):17-19.
[15] 王田苗,孟偲,官胜国,等.柔性杆连接的仿壁虎机器人结构设计[J].机械工程学报, 2009(10):1-7.
[16] 詹毅仁.舵机电机驱动的类壁虎机器人的运动控制系统[D].南京:南京航空航天大学,2006.
[17] 代良全,张昊,戴振东.仿壁虎机器人足端工作空间分析及其实现协调运动的步态规划[J].机器人, 2008(2):182-186.
[18] 张昊.大壁虎运动行为研究及仿壁虎机器人研制[D].南京:南京航空航天大学,2010.
[19] 李宏凯.类壁虎机器人的仿生控制:从行为观测到控制实现[D]. 南京:南京航空航天大学,2010.
[20] 于树林,梅涛,李冰,等.柔性仿生爬壁机器人控制系统研究[J].自动化与仪表,2011(6):1-3,35.
Design of Cherry Picking Robot Based on PLC High-speed Parallel Automatic Control
Fu Yao
(Chongqing Industry Polytechnic College, Chongqing 401120, China)
As a high-tech product to lead the future, the robot is very obvious in every industry, and its development prospects are very broad. Gecko robot is an important branch of special robot, with high flexibility, mobility, which can replace people to finish the repetitive, tedious or dangerous work.It not only can flaw detection, post disaster search and rescue work of large machinery and equipment parts, also can be application in information gathering, military, exploring mountains etc. As the core template, the DSP intelligent control platform can be studied through gecko robot motion planning and control system, the farmland information for real-time acquisition, and early warning in accordance with the incidence of crop. Experiments show that this paper designs the farmland information collection robot with high intelligence, high control precision, high flexibility, strong reliability, short development cycle and so on.
similar house lizard;DSP; field information collection robot; motion control
2015-11-27
重庆市教育委员会教育信息化试点建设项目(cqjyxxh20150 22)
傅 瑶(1985-)女,重庆人,讲师,硕士,(E-mail)fuyao_chq@163.com。
S126;TP242
A
1003-188X(2017)01-0096-05
