考虑侧倾影响的汽车横摆角速度与质心侧偏角滤波估计*
2017-12-15陈学文周越张进国
陈学文 周越 张进国
(辽宁工业大学,锦州 121001)
考虑侧倾影响的汽车横摆角速度与质心侧偏角滤波估计*
陈学文 周越 张进国
(辽宁工业大学,锦州 121001)
为准确识别汽车前方弯道路段曲率信息,考虑侧倾运动的实际影响,建立了汽车质心运动、横摆运动及侧倾运动具有非线性特征的3自由度车辆操纵稳定性模型,设计了汽车质心侧偏角与横摆角速度扩展卡尔曼滤波估计器,实现了巡航车辆运动特征的在线实时估计。采用双移线输入,通过CarSim与Matlab/Simulink的联合仿真进行验证,结果表明,即使在大噪声条件下,所设计的扩展卡尔曼滤波估计器也能较好地实现车辆横摆角速度与质心侧偏角的准确估计。
1 前言
汽车自适应巡航控制(Adaptive Cruise Control,ACC)系统在一定程度上实现了安全跟车,但仍存在与前车发生碰撞的可能性,尤其是在城市道路行车环境中。因此,准确识别弯道路段并跟踪关键目标,对于完善或改进 ACC 系统[1~3]、前撞预警系统[4]、车道偏离预警与保持系统[5~6]及自动紧急制动系统[7]等的性能具有实际应用价值。准确识别前方弯道路段信息,还需要结合巡航车辆自身的运动状态进行。通过质心侧偏角和横摆角速度可间接得到汽车的侧向运动特征,因此,对汽车质心侧偏角和横摆角速度进行准确估计十分必要。
目前,对于汽车质心侧偏角与横摆角速度的估计主要基于简化的2自由度模型,忽略了侧倾运动导致的左、右车轮载荷的变化引起的轮胎特性变化以及轮胎回正力矩的影响等因素,或者是在2自由度模型基础上建立了反映汽车侧向加速度的3自由度运动微分方程,但仍没有考虑侧倾运动因素的影响[8~10],基于上述模型的估计值必然存在较大偏差。焦新龙等基于3自由度车辆动力学模型建立了横摆角速度的卡尔曼滤波器,实现了道路定曲率的在线估算,但实际车辆建模时未考虑非线性运动特征影响且假定道路曲率为定值,因此,利用线性卡尔曼滤波器实现目标的估计必然会存在一定误差[11]。
本文考虑汽车侧倾运动的影响,建立了包含汽车质心运动、横摆运动及侧倾运动具有非线性特征的3自由度车辆模型,设计了关于汽车质心侧偏角和横摆角速度的扩展卡尔曼滤波估计器,实现了车辆运动状态的实时估计,消除了实际测量噪声的干扰。最后,基于CarSim与Simulink验证了滤波器的有效性。
2 汽车3自由度操纵稳定性模型的建立
在汽车的稳定性控制研究中,横摆运动与侧向运动是关注的重点。为了如实反映车辆在弯道路段的行驶状态,本文考虑车辆弯道行驶的侧倾运动影响,建立了反映汽车质心运动、横摆运动及侧倾运动等具有非线性特征的3自由度汽车操纵稳定性模型,如图1所示。其中:V为车速;Ms为悬架质量;wr为横摆角速度;b为质心侧偏角;bf、br分别为前、后轮轮胎侧偏角(假定左、右轮胎侧偏角相等);d为前轮转向角;f为悬架的侧倾角;lf、lr分别为前、后轴至质心的距离;df、dr分别为前、后轮距;hs为侧倾力臂;∂X∂Z为车轮滚动阻力系数;hf、hr分别为前、后轴距离地面的高度;Fyf、Fyr分别为前、后轮等效侧向力。
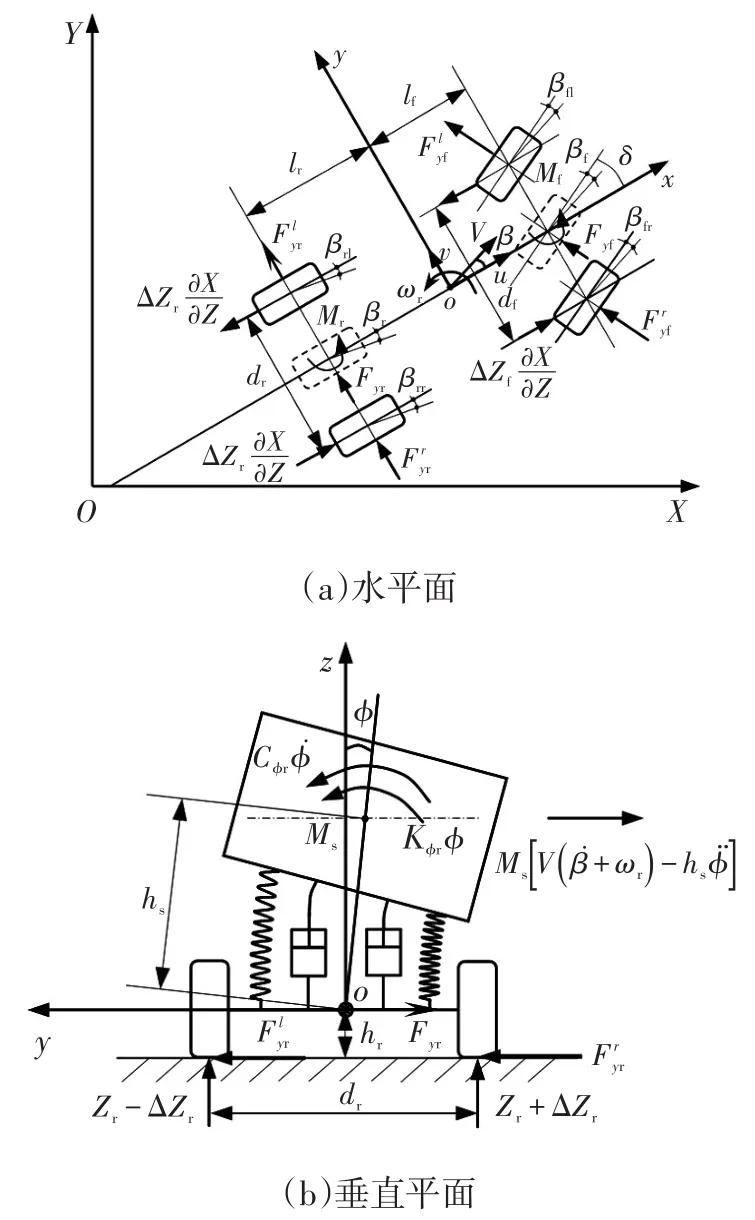
图1 简化的3自由度汽车操纵稳定性模型
基于汽车3自由度操纵稳定性模型,确定其质心运动、横摆运动及侧倾运动微分方程:
Y方向的受力平衡方程:

式中,Wβ=2(kf+kr);;;Wδ=-2kf;kf、kr分别为前、后轮胎的侧偏刚度;Ef、Er分别为前、后轴侧倾转向系数;∂Yfy∂φ为前轮外倾侧倾刚度系数。
绕Z轴的力矩方程:

式中,Iz为整车绕Z轴的转动惯量;Ixz为悬架质量绕X、Z两轴的惯性积;;;;Cφf、Cφr分别为前、后悬架侧倾角阻尼;Uf、Ur分别为前、后轮胎侧倾角回正力矩系数;Kφf、Kφr分 别 为 前 、后 悬 架 侧 倾 角 刚 度 ;。
绕X轴的力矩方程:

3 汽车横摆角速度与质心侧偏角滤波器设计
车辆系统具有明显的非线性特征,采用卡尔曼滤波算法对其进行状态估计是不适合的,扩展卡尔曼滤波算法是一种预测校正算法[9,12]。根据估计对象建立状态方程与量测方程,对非线性模型进行线性化并赋初值进行递推估计,主要包括预测过程与校正过程,其具体过程如下:
a.状态方程与量测方程:

式中,xk、yk分别为实际的状态变量与观测变量;uk为控制变量;wk、vk分别为过程噪声与观测噪声。
b.模型线性化
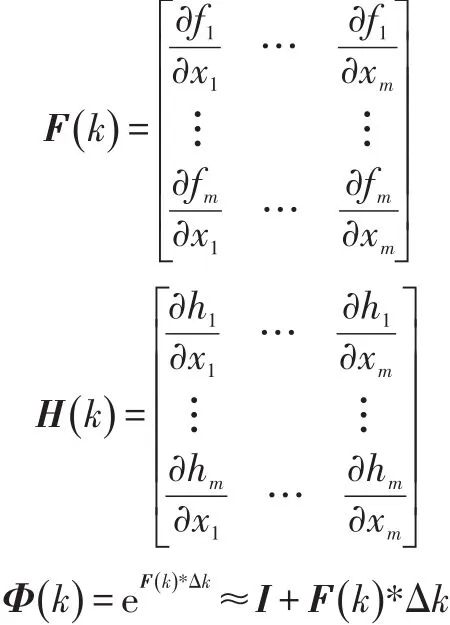
式中,F(k)、H(k)分别为非线性函数f(xk,uk,wk)与h(xk,uk)对状态变量求偏导的雅克比矩阵;φ(k)为状态转移矩阵;I为适维单位矩阵;Δk为采样时间。
c.扩展卡尔曼滤波算法递推步骤
扩展卡尔曼滤波算法递推步骤主要包括预测与校正过程,并给定初值即可实现。
预测过程:
校正过程:
Qk、Rk分别为过程噪声与观测噪声协方差矩阵。
将纵向、侧向与横摆的3自由度非线性方程进一步整理如下:
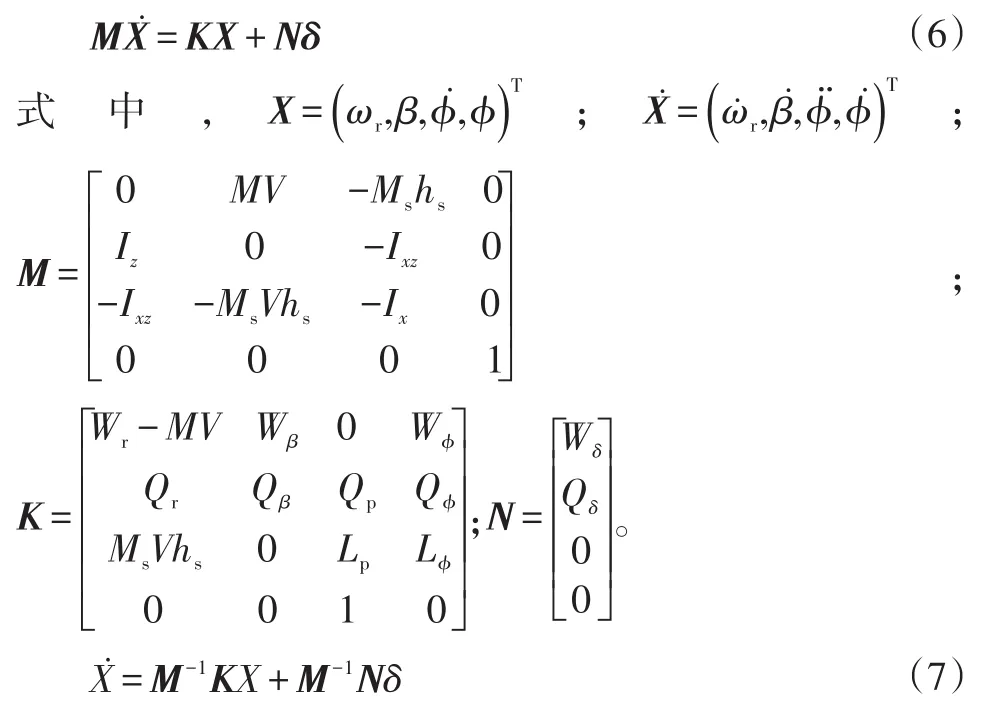
进一步整理成关于横摆角速度与质心侧偏角状态预测方程与量测方程:

式中,A=M-1K;B=M-1N;C=I4×4;u=δ。
根据式(8),结合上述扩展卡尔曼滤波算法递推步骤,即可实现横摆角速度与质心侧偏角的滤波估计。
4 横摆角速度与质心侧偏角滤波器仿真验证
在CarSim中构建车辆模型与道路模型仿真环境,通过CarSim获得转向盘转角双移线输入信号,在Simulink中实现了横摆角速度和质心侧偏角的实时估计。仿真过程中,车速设为120 km/h,采样间隔为0.01 s,车辆模型参数如表1所示。

表1 车辆模型参数
图2为汽车横摆角速度、质心侧偏角滤波值与实际值的对比结果。从图2中可以看出,在汽车行驶过程中,利用本文设计的扩展卡尔曼滤波器得到的汽车横摆角速度和质心侧偏角滤波值与实际值具有较高的一致性。这说明,本文设计的关于汽车横摆角速度与质心侧偏角的扩展卡尔曼滤波器是有效的,具有较强的鲁棒性。
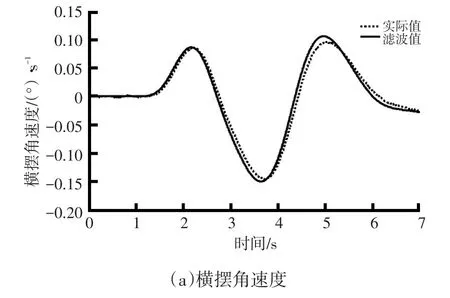
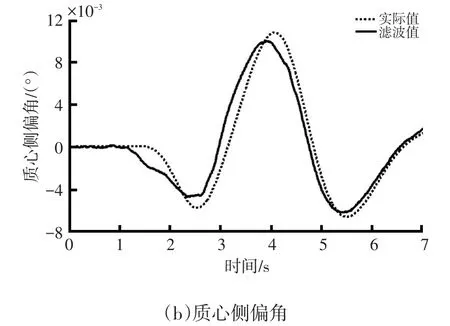
图2 汽车横摆角速度、质心侧偏角滤波值与实际值的对比
为了进一步验证本文设计的汽车横摆角速度与质心侧偏角扩展卡尔曼滤波器的有效性和稳定性,设置了均值为0,方差为1的正态分布的外界噪声干扰,噪声干扰条件下的仿真结果如图4与图5所示。
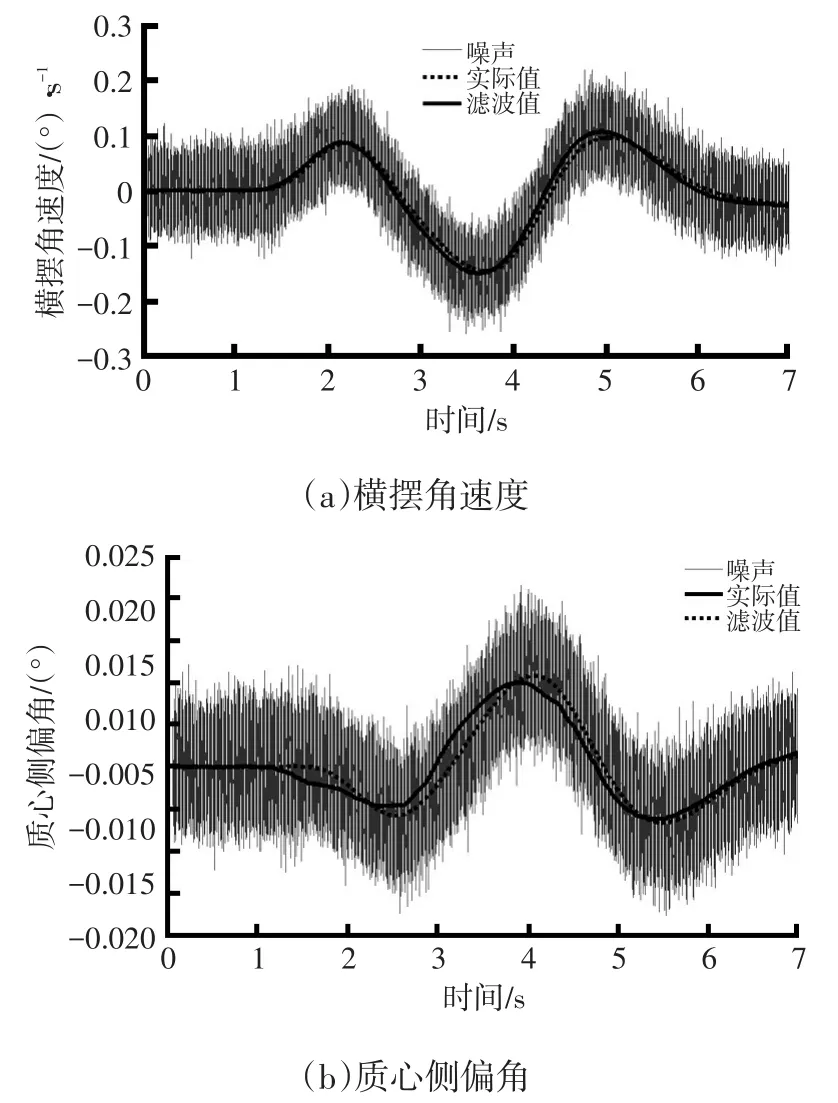
图3 噪声干扰条件下的仿真结果
由图3可知,即使在较大噪声干扰情况下也可以对汽车横摆角速度与质心侧偏角进行有效地估计,这说明本文设计的扩展卡尔曼滤波估计器具有较好的鲁棒性及较强的抗干扰性。
5 结束语
考虑侧倾运动的实际影响,构建了汽车质心运动、横摆运动及侧倾运动3自由度车辆操纵稳定性模型,设计了关于汽车质心侧偏角和横摆角速度的扩展卡尔曼滤波估计器。在CarSim中构建车辆与道路模型仿真环境,通过CarSim获得转向盘转角双移线输入信号,在Simulink中实现了横摆角速度和质心侧偏角的实时估计。仿真结果表明:汽车横摆角速度和质心侧偏角的滤波结果与实际值基本吻合。在具有噪声干扰情况下的仿真结果也表明,本文设计的扩展滤波器具有较强的抗干扰性,可对汽车横摆角速度与质心侧偏角进行有效地估计,可用于汽车巡航或避撞等主动安全系统的目标识别与控制。
1 Omae M,Fukuda R,Ogitsu T,et al.Control Procedures and Exchanged Information for Cooperative Adaptive Cruise ControlofHeavy-Duty Vehicles Using BroadcastInter-Vehicle Communication.International Journal of Intelligent Transportation Systems Research,2014,12(3):84~97.
2 Chen XW,Zhang JG,Liu YJ.Research on the Intelligent Control and Simulation of Automobile Cruise System Based on Fuzzy System.Mathematical Problems in Engineering,2016(5):1~12.
3 陈学文,刘伟川,祝东鑫,等.汽车巡航智能控制策略及仿真研究.机械设计与制造,2016(4):133~136.
4 Han J,Heo O,Park M,et al.Vehicle Distance Estimation Using a Mono-camera for FCW/AEB Systems.International Journal of Automotive Technology,2016,17(3):483~491.
5 Gaikwad V,Lokhande S.Lane Departure Identification for Advanced Driver Assistance.IEEE Transactions on Intelligent Transportation Systems,2015,16(2):910~918.
6 Son Y S,Kim W,Lee S H,et al.Predictive Virtual Lane Method Using Relative Motions between a Vehicle and Lanes.International Journal of Control,Automation,and Systems,2015,13(1):146~155.
7 Lee M,Jeong H.Driver Propensity Characterization for Different Dorward Collision Warning Times.International Journal of Automotive Technology,2014,15(6):927~936.
8 Lee M H,Lee K S,Park H G,et al.Lateral controller design for an unmanned vehicle via Kalman filtering.InternationalJournalofAutomobile Technology,2012,13(5):801~807.
9 李刚,解瑞春,卫绍元,等.基于信息融合技术的车辆行驶状态估计.计算机仿真,2014,31(10):183~186.
10 林程,周逢军,徐志峰,等.基于补偿自适应控制算法的车辆状态参数估计.农业机械学报,2014,45(11):1~8.
11 焦新龙,米雪玉,王畅,等.车辆自适应巡航控制系统有效目标辨识算法.长安大学学报(自然科学版),2014,34(3):137~144.
12 Gadola M,Chindamo D,Romano M,et al.Development and Validation of a Kalman Filter-based Model for Vehicle Slip Angle Estimation.Vehicle System Dycle Slip Angle Estimation.Vehicle System Dynamics,2014,52(1):68~84.
A Filtering Estimation on Yaw Rate and Side Slip Angle Considering Roll Motion of Vehicle Body
Chen Xuewen,Zhou Yue,Zhang Jinguo
(Liaoning University of Technology,Jinzhou 121001)
It is necessary to estimate accurately the vehicle dynamic state for distinguishing the road curvature information of automobile cruise system.Considering roll motion of vehicle body,an extend Kalman filter is proposed to realize the estimation of motion parameters based on a nonlinear three degrees of freedom vehicle model including the longitudinal,lateral and yaw direction.Adopting CarSim and MATLAB/Simulink co-simulation,the estimation on yaw rate and side slip angle is validated under high-speed double lane conditions.The simulation results show that the proposed EKF can estimate accurately vehicle’s yaw rate and side slip angle even if the existence of strong noise.The research results have important reference values in obtainning information of curve road and practical guiding significance to prevent the goal confusion or missing of key target in the curve road and avoid effectively rear-end collisions on automobile cruise system.
Automobile cruise control system,Extend Kalman Filter,Yaw rate,Side slip angle,Simulation
汽车巡航系统 扩展卡尔曼滤波器 横摆角速度 质心侧偏角 仿真
U461.91
A
1000-3703(2017)11-0040-04
辽宁省科技计划资助项目(201602368)。
(责任编辑斛 畔)
修改稿收到日期为2017年9月8日。