雷达液位计测距技术在船舶水尺计重中的应用
2017-12-13沈益骏李博王鹏皓
沈益骏,李博,王鹏皓
1舟山出入境检验检疫局,浙江舟山316000
2浙江海洋大学海洋科学与技术学院,浙江舟山316004
雷达液位计测距技术在船舶水尺计重中的应用
沈益骏1,李博2,王鹏皓2
1舟山出入境检验检疫局,浙江舟山316000
2浙江海洋大学海洋科学与技术学院,浙江舟山316004
[目的]传统船舶水尺计重过程中,检视船舶吃水依赖人工目测方法,该方法存在主观性强、准确度及工作效能低等问题。为了解决该问题,[方法]利用在石化行业广泛应用于石油及制品上的雷达液位测距技术,研发一套雷达水尺观测装置,设计优化系列数据计算公式,使其数据结果真实可靠。同时设计雷达和目测检视的对比验证试验,检验其数据结果的准确度。[结果]由雷达传感器、固定支架、显示器等共同组成的雷达水尺检测装置依据靠港船舶的实际应用环境量身打造,并在设计的验证试验中进行试用。[结论]设计定型的雷达水尺检测装置以15船次国际船舶为研究对象,以雷达和人工目测2种方式检视船舶吃水并进行对比试验,数据表明差异范围在0.001~0.022 m之间,平均差异率为0.028%,符合对船舶吃水检视精度的要求。
雷达液位计;船舶吃水;水尺计重
0 引 言
水尺计重[1]是国外广泛应用于船舶运输大宗廉价散装货物计量重量的方法,同时也是进出口商品重量鉴定的重要方法之一。水尺计重中影响计量准确性的最关键因素是船舶六面吃水数值的读取。传统的观测吃水,往往是通过租用工作艇或小船,使其靠近船舶外档水尺标志位置,再进行目测读数。这种方法不仅时效性差、费用高、准确性低,且工作人员的人身安全也很难得到保证。
针对此类问题,船舶领域的相关专家学者基于图像处理、电子尺等先进技术提出了多种船舶吃水检测方法。陈文炜等[2]提出利用激光测距传感器的吃水测量系统的测量方法,虽然激光较雷达测距远、精度高,但是激光测距前需在水面铺放经特殊处理的反射板,否则激光传感器难以接收反射光束,最终导致无法准确给出数据。当前,全国各大重要港区都在力促船舶快进快出,提高码头使用率,而激光测距过程繁琐,测前还需铺设反射板,显然难以适应港区日常作业的要求。马晓波等[3]提出了一种船舶水尺测量物理投尺法,但如何控制尺头传感器在触水的一刻精准发出警报,并做到立即暂停投尺则是重点和难点,这一难以有效解决的问题也是导致水尺数据准确度低的关键所在。冉鑫等[4]提出了基于图像处理的船舶水尺刻度识别方法,虽然现阶段在图像识别理论方面已较完善,但是图像的采集,以及图像中水尺标志所处的位置及图片清晰度都与能否准确识别息息相关,况且图像识别中的吃水线识别尚未完全解决。
可以看出,在前人的研究中,上述水尺检测方法尚不能完全解决船舶吃水读数问题。当前,由于雷达[5]具有测距精度高、可靠性强等优点被诸多领域广泛使用,尤其在石油储罐液位计量中被各大储运公司大量使用。但在船舶观测吃水领域,尚未有相关文献记录显示雷达的投入应用。为实现高效、准确读取船舶吃水数据的目标,鉴于雷达液位计测距技术在石油化工行业的广泛应用,同时具备简单易操作且准确性较高的特点,认为研发一种利用雷达液位计测距技术测量船舶吃水的装置是可行的。
本文将以雷达传感器、靠港船舶为研究对象,基于国际通用海运船舶,研发一套雷达液位计船舶吃水观测装置。首先,根据量程、作业环境等因素选择精度适宜、操作简单的雷达测距传感器;接着,结合船舶自身的构造特点,研发支架系统,用以稳固雷达传感器并辅以量身设计的计算系统,测量结束后可自动给出吃水数值;最后,设计验证试验,证明该套系统的准确性。
1 原理与方法
国外于20世纪60年代开始使用雷达液位计测距技术。它是一种采用微波测量技术的非接触式液位测量系统。该技术通过更新换代,发展至今已非常成熟,具有可靠性强、精度高等特点。雷达液位计被广泛应用于石油化工行业,其测量精度得到了国际计量机构的认证,已达到贸易交接的物料计量要求[6]。因此,采用雷达液位计测距技术实现距离测量是可行的。船舶雷达水尺测量仪的测量工作原理如图1所示,测量仪用可移动三脚架放置于船舶主甲板上,雷达探头旋转出船舶舷侧并垂直指向海面。打开雷达液位测量仪,首先连续测量不超过2 min,且至少包括2个以上波浪涌动周期,以此较准确地获取雷达探头至海面的平均垂直距离D,扣除已知的固定支架至雷达探头的距离(即三脚架高度)E,就可以得到甲板至吃水线的距离 B;甲板线至船舶基线[7]的距离 A由船舶自身参数查得;利用雷达测得距离B+E;则船舶实际吃水C为


图1 测量装置使用示意图Fig.1 Schematic diagram of measuring device
2 测量点的分布
水尺是表示船舶吃水深度的标志,它对称地标在船艏、船艉以及船舯两舷[8]。水尺是以船底龙骨线下缘为零点,自下而上顺序标明至船舶最大吃水以上。因此,结合测量需求,船舶吃水测量系统可以沿船身水尺标志处,在左、右舷甲板各布置3个测点,船艏、船艉、船舯各分布2个测量点,共计 6 个测点[9],分别为 C1,C2,C3,C4,C5,C6,其分布如图2所示。
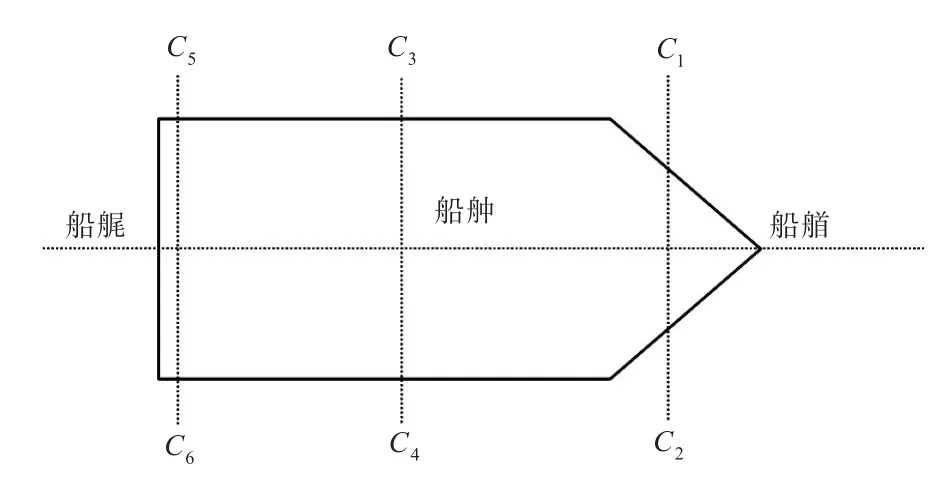
图2 测量点分布Fig.2 Distribution of measuring points
3 雷达水尺观测器设计
该雷达水尺观测器由固定支架、雷达传感器、计算单元及显示单元4部分组成。观测器部分功能如图3所示。
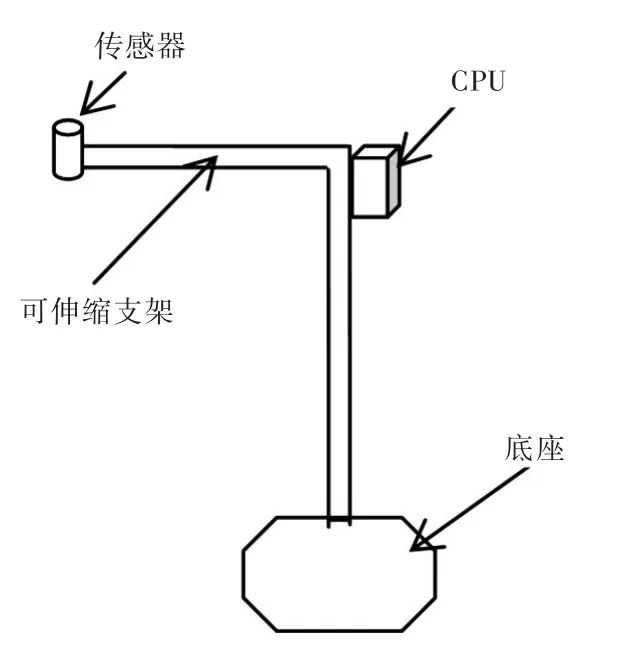
图3 雷达水尺检测器设计简图Fig.3 Design sketch of measuring device
3.1 雷达传感器及固定支架
固定支架主要起稳固雷达传感器的作用,且其自身高度为定值。具体操作如下:检测时,将雷达传感器及三脚架安放于船舶水尺标志位置所处的甲板,保证脚架垂直于甲板表面,否则将引入计量误差。在准备工作就绪后,调整传感器位置,并使其垂直射向水平面。由于港口环境潮湿,电子器械受潮不仅易损坏,且影响计量精度,为有效提升雷达传感器的耐用性,确保其测量的准确性,传感器需进行防水处理,要求有防水膜对其进行包裹。在本装置内,雷达电磁波的发射装置与接收装置合二为一,全部集中于图3所示的测量装置探头内。该传感器可在较短的时间内精准测量多组数据,以此确保在后续数据处理过程中的延续性与准确性。在进行测量工作时,雷达传感器发射电磁波,同时积极接收回波信号,将回波信号进行放大、定位,自动进行分析处理。数据处理完毕即进行实时存储。
3.2 数据计算及显示单元
该装置内置可充电锂电池,为仪器正常运行提供所需电力,同时在固定支架末端集成数据接收模块、处理模块与集成电路板。CPU采用双串口的单片机,一个串口连接雷达传感器,用于接收处理传感器的测量数据,另一个串口连接无线数传模块,用于无线传输处理后的数据。具体操作步骤如下:雷达传感器获取的数据通过固定支架内部布置的数据线路直接传输至CPU,并由其优先进行数据处理。对传感器的每一次测量进行自动加权平均计算,并把计算结果自动保存在TF存储卡内。此数据可作为历史资料存档备用。一旦货量存有争议,可随时翻阅历史存储档案,还原当时现场检验鉴定情况,解决现场查验不可追溯的问题。为了免除重复拔插TF卡读取船舶吃水数值的麻烦,同时为使数值的读取简单易操作,本装置还设计了计算结果显示单元。如图4所示,该显示装置装有液晶显示面板,用于显示测量出来的数据。同时,设置按键用于控制仪器开关与测量次数的计量、重置数据以及输入相关参数等功能。
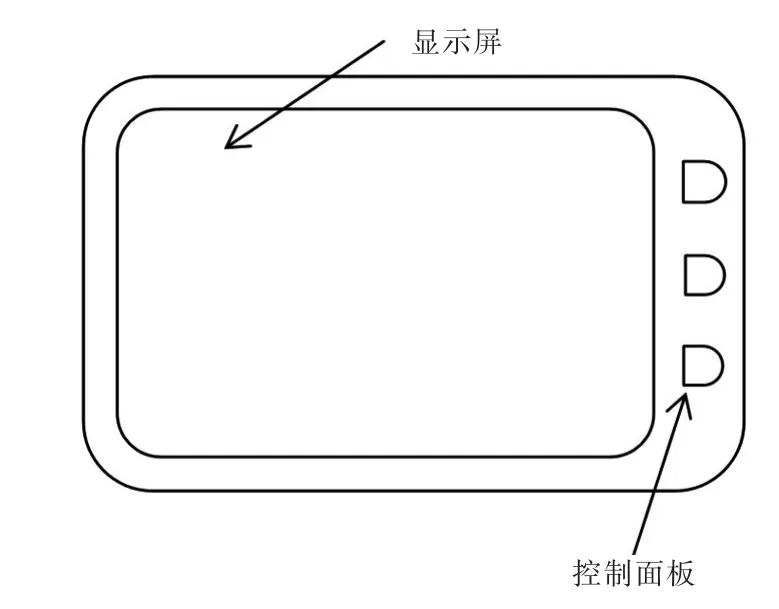
图4 显示器Fig.4 Monitor
4 使用方法
该雷达水尺观测装置的使用目的在于取代传统乘坐拖轮或小船观测船舶六面吃水的方法,同时摆脱现场环境及天气的束缚。该观测器具体使用方法如下:待船舶靠港且系缆完毕后,由检验员将仪器携带至船舶水尺标志位置的甲板线[10]处,在测量前,首先确保甲板线与固定支架底座处于同一水平面位置,否则,有必要测出两水平面的直线距离。由于此观测器是基于甲板线并以此为基准点,若固定支架底座平面与甲板线平面存在垂直高度,当进行船舶吃水计算时,则需进行修正处理,否则影响计量的准确性。放好后,调整支架,使仪器整体处于稳定状态,同时雷达传感器处于船体外侧且传感器垂直于水面。考虑到在港船舶会因风浪而波动,为消除波浪的影响,在位置调整稳妥后,需打开仪器开关,进行连续一段时间的测量(连续测量不少于2 min)。雷达液位计在该测量点测出的一系列数据会直接传输至CPU内进行数据记录和处理。对剩下的5处测量点该装置以同样的方式依次展开测量,待全部测量点测量完成后,根据显示的所有测点数据的周期性变化曲线,选取相应的同步时间段数据进行平均计算。其流程如图5所示。
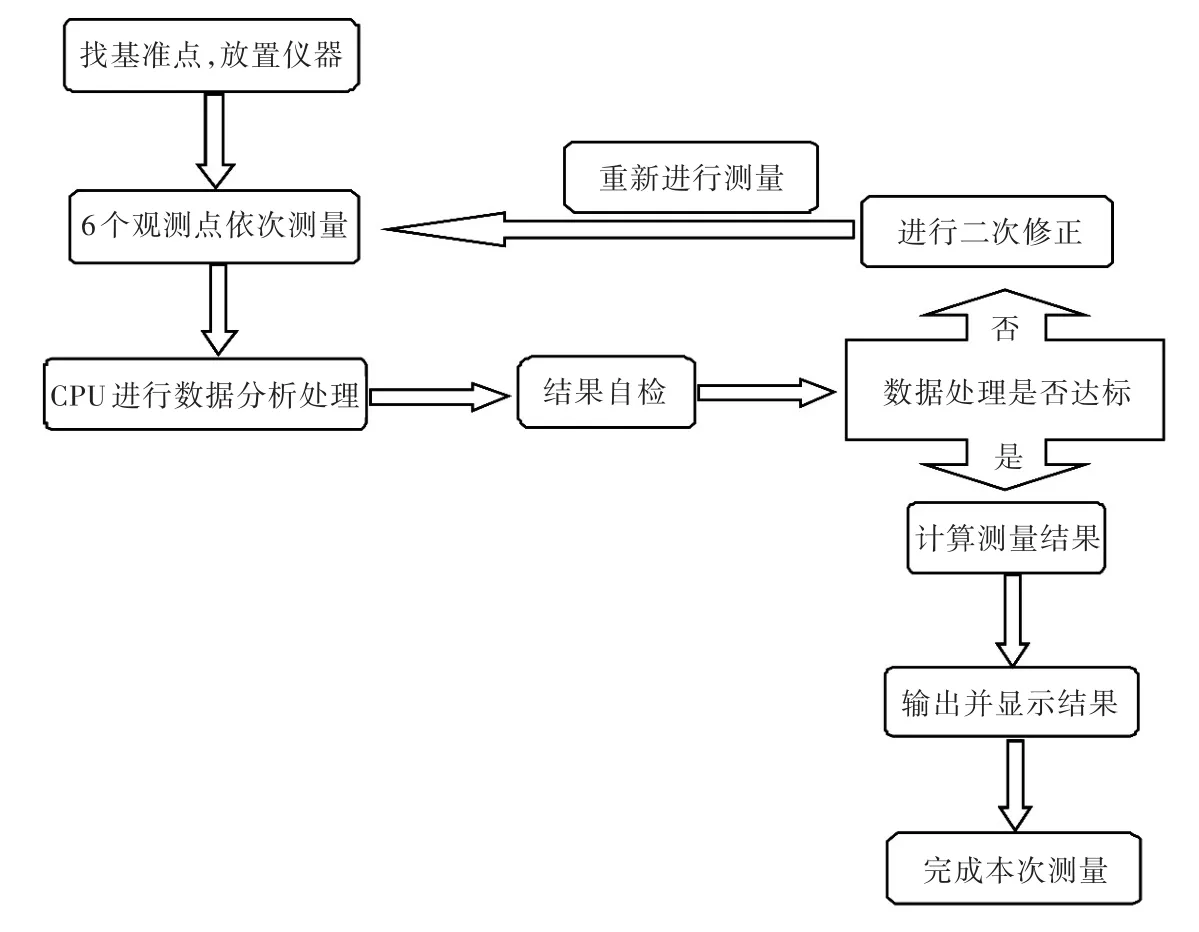
图5 检视船舶吃水流程图Fig.5 Flow chart of reviewing ship draft
5 数据处理
5.1 雷达液位测量距离数据处理
当散货船舶停泊于相应的港区后,特别如舟山等入海口波涛汹涌,常年伴有大风,靠港船舶的实际水尺读数势必受到影响。为消除波浪等因素的影响,保证船舶吃水读取的准确性,在测量时,雷达液位计的传感器置于船体外侧,且进行持续至少2 min的数据观测。传感器接收单元会持续接收发射单元反射回来的雷达电磁波。同时,依次测量并记录传感器至水面的距离数据。该装置将接收到的每一个数据记录下来,标注为d( d1,d2,d3,d4,…,dn),并记录每次测量所用的总时间 T0(单位:min)。
针对T0时间段内的d值进行积分,得到总量程

式中,d为某次测得的传感器到水面的垂直距离,m。
将得到的 DS与测量总的时间T0相除,即可得到传感器至水面的距离D,公式为:

式中,D为传感器至水面的距离,m。
由于传感器从发射到接收信号为来回里程,所以上述公式在计算传感器至水面的距离时只能算其一半的距离。为保证测量结果的准确性,在每个测量点需进行2次以上测量,测量后再对其进行加权平均。获取该测量值后,最后以电子文档的形式自动存储于TF卡中。
以此测量方法为依据,依次对位于船舶上的6个测量点(C1,C2,C3,C4,C5,C6)进行测量,得到6个测量值,分别记为 D1,D2,D3,D4,D5, D6。
5.2 船舶吃水的校正
根据陈亚飞等[11-12]相关学者研发新型船舶吃水观测器的经验可知,船舶水尺标志是否在其艏艉垂线上,以及船舶拱陷是否予以修正对于水尺计重结果的准确性存在重要影响。因此,结合已有的经验,提出如下计算方法。
船舶吃水通过横倾、纵倾及拱陷3个部分校正得到,计算精度为 0.001 m[13]。
5.2.1 横倾校正
横倾是指船舶左、右舷吃水不同,为了正确计算,必须首先对横倾状态下船舶的吃水进行校正。
由于船体左右对称,故横倾校正只需对左右吃水数进行算术平均:

式中:C1为艏左吃水,m;C2为艏右吃水,m;C3为舯左吃水,m;C4为舯右吃水,m;C5为艉左吃水,m;C6为艉右吃水,m;C12为艏平均吃水,m;C34为舯平均吃水,m;C56为艉平均吃水,m。因此,艏艉吃水差T为

5.2.2 纵倾校正
由于船舶的排水量计算是以艏艉垂线间距离(LBP)为基础进行的,排水量表一般是根据船舶呈平浮状态制成,所以,船舶吃水的准确数值是艏垂线、艉垂线和LBP中点的吃水值,如图6所示。当船艏、舯、艉水尺标志与其相应的艏垂线、舯垂线、艉垂线不在同一线上,且船舶呈纵倾时,必须利用水尺标志与垂线的距离、LBP等已知参数代入公式,算出艏、舯、艉吃水差的校正值。以船艏、船艉水尺修正为例,公式推导如下:

式中:F0为艏水尺标志到艏垂线的距离,m;A为艉水尺标志到艉垂线的距离;LBP为垂线间的长度,m;T为艏艉吃水差,m;FC为艏吃水校正值,m;AC为艉吃水校正值,m。

图6 纵倾修正Fig.6 Trim correction
5.2.3 拱陷校正
拱是船体中部上拱,这时船舶甲板受到拉伸,船底受到挤压;陷则是甲板受到挤压,船底受到拉伸。拱陷值是船舶艏、艉吃水的平均值和船舯吃水平均值之差。不论船舶呈现的是拱还是陷,在计算船舶排水量时均为多算或少算因船体变形而导致的增加或减少的排水量,因此当船舶出现拱陷时,应进行拱陷校正。校正计算公式为

式中,TM为拱陷校正后的平均吃水,m。
综上所述,由雷达水尺检测器读取的六面吃水经横倾、纵倾及拱陷校正而计算得出平均吃水TM后可再据此查相应的排水量表。
5.3 排水量的计算
5.3.1 排水量的纵倾修正
船舶图标上所列的排水量是根据船舶在不同吃水的平浮状态下求得,当船舶处于纵倾状态时,由于艏艉形状不同,导致平浮到纵倾状态的排水量不同,故必须对纵倾时的排水量进行修正。根本式校正公式[14]被验证具有一定的准确性,故被国际上所接受并广泛采用,公式如下:
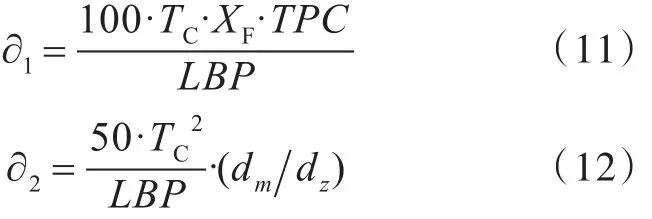
式中:∂1为排水量的纵倾第1项校正值,t;TC为校正后的吃水差,m;XF为船舶漂心距船体中心的距离,m;TPC为拱陷校正后每厘米吃水吨数,t/cm;∂2为排水量的纵倾第2项校正值,t;dmdz为纵倾力矩变化率,t/cm。
经过纵倾修正后的船舶的排水量为

式中:∂0为平均吃水处的相应排水量,t;∂修正为经校正后的排水量,t。
5.3.2 排水量的港水密度校正
船舶所处水域港水密度不同时,只要船舶载荷不变,则排水量保持不变,但是船舶的排水体积以及船舶吃水会随港水密度的不同而发生变化。因此,当船舶处于不同密度的港水时,其排水量必须经港水密度校正,校正公式为

式中:∂为港水密度校正后的排水量,t;ρ为船舶停泊海区海水的密度,g/cm3;ρ0为标准密度,一般取 ρ=1.025 g/cm3。
6 雷达液位计测量船舶吃水的应用
2017年4~7月,在舟山老塘山港区,对在此靠港卸货的15船次国际船舶就其左侧中间水尺安排了2组工作人员(一组手持雷达观测器,另一组乘坐拖轮目测水尺)同时进行比对测量,目的是为了验证雷达水尺检测器的准确性及可靠性。为节约时间且使其具有代表性,在试验过程中,尽可能选择足够多的船舶,且选择对水尺计重影响最大的中间水尺读数作为试验对象。试验开始前,安排工作人员用特制三脚架装置固定雷达传感器于甲板线的起始位置,每次雷达实际测量时间为300 s,计算有效数据的时间段控制在210~260 s之间,在用雷达观测器检测的同时,安排另一具有操作水尺计重资质的资深工作人员乘坐小船对船舶外挡中间水尺进行鉴定。目测水尺精度公制为0.01 m[13],雷达则为 0.001 m[15]。采用 2 种方法得到的结果如表1所示。
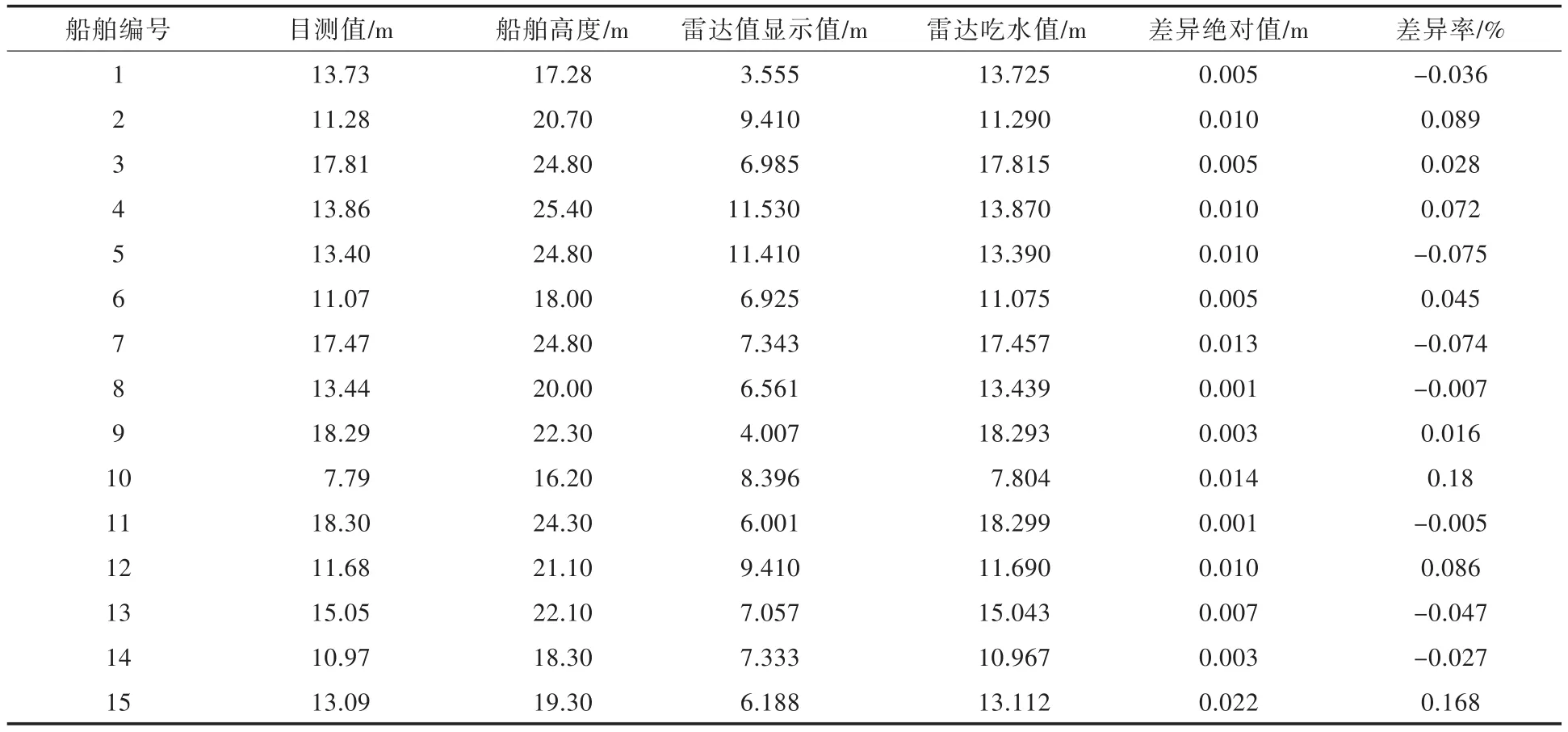
表1 雷达测量船舶吃水与人工目测方法数据比对Table 1 Data comparison between radar survey and manual visual method
雷达检视水尺值较目测方式的差异率E为

式中:F为雷达检视水尺值;G为目测检视水尺值。
从表1可以看出,15船次国际船舶雷达检视水尺较目测方式差异范围在0.001~0.022 m之间,平均差异率为0.028%,符合设计之初对于误差的预估值,也符合船舶制表的准确度在0.1%以内且水尺计重的准确度在0.5%以内[16]的要求。事实上,现在的雷达液位计测距技术可因测量精度及量程需求而量身选取满足要求的传感器,目前在石化行业使用的传感器精度远高于目测的精度。此外,本次试验对15船次国际船舶的左侧中间水尺进行了测量,同时依托水尺鉴定行业的资深专家对船舶该处水尺进行了目测检视。经过两者数据的比对,基本认为利用雷达液位测距技术检测船舶吃水的方法可靠、准确。
7 结 语
针对目前船舶水尺计重中采用人工目测及少部分利用图像处理技术检视船舶吃水存在准确性差、可靠性不强、工作强度大等问题,利用成熟可靠的雷达液位测距技术,以靠港船舶为检测对象,从固定支架、显示及计算等部分对雷达水尺检测装置进行了重点设计,同时将开发成功的雷达水尺检测装置投入试验。结果表明,使用该装置检测结果准确、可靠,而且它的投入使用较传统的乘坐拖轮目测检视船舶吃水方法至少可节省45 min,节约拖轮租用费1 000元/次,可有效促进港口船舶的快进快出,提高码头利用率,推动地方港口经济更好发展。
[1]刘辉强.水尺计重及其误差分析[D].大连:大连海事大学,2010.LIU H Q.Draft survey and errors analysis[D].Dalian:Dalian Maritime University,2010(in Chinese).
[2]陈文炜,俞汲,徐杰,等.一种船舶吃水测量系统[J].中国造船,2013,28(1):166-171.CHEN W W,YU J,XU J,et al.A new measurement system of ship draft[J].Shipbuilding of China,2013,28(1):166-171(in Chinese).
[3]马晓波,杜柏松,戴冉.一种船舶吃水测量尺的设计[J].船海工程,2016,45(3):35-38.MA X B,DU B S,DAI R.Design of a ship's draft mea⁃suring ruler[J].Shipamp;Ocean Engineering,2016,45(3):35-38(in Chinese).
[4]冉鑫,彭将辉.基于图像处理的船舶水尺刻度识别[J].上海海事大学学报,2012,33(2):6-9.RAN X,PENG J H.Ship draft mark recognition based on image processing[J].Journal of Shanghai Maritime University,2012,33(2):6-9(in Chinese).
[5]黎湘,范梅梅.认知雷达及其关键技术研究进展[J].电子学报,2012,40(9):1863-1870.LI X,FAN M M.Research advance on cognitive radar and its key technology[J].Acta Electronica Sinica,2012,40(9):1863-1870(in Chinese).
[6]刘冰.雷达液位计的测量原理与应用[J].广州化工,2012,40(21):125-127.LIU B.Detection principle and application of radar lev⁃el meter[J].Guangzhou Chemical Industry and Tech⁃nology,2012,40(21):125-127(in Chinese).
[7]张锋.船舶载重线及水尺标志勘划出现不一致的释疑[J].航海技术,2013(2):32-33.ZHANG F.The explanation of loadline and draft marks assigned inconsistent[J].Marine Technology,2013(2):32-33(in Chinese).
[8]罗婧,施朝健,冉鑫.一种视频图像船舶吃水线自动检测方法[J].船海工程,2012,41(1):30-32,37.LUO J,SHI C J,RAN X.A new method for automatic detection of ship waterline[J].Shipamp;Ocean Engineer⁃ing,2012,41(1):30-32,37(in Chinese).
[9]郭秀艳.船舶水尺吃水值检测方法研究[D].大连:大连海事大学,2014.GUO X Y.Research on detection method of ship draft[D].Dalian:Dalian Maritime University,2014(in Chinese).
[10]刘永翔,焦德义.某型船船体找线方法与工艺要求初探[J].造船技术,2015(6):55-57.LIU Y X,JIAO D Y.The primary investigation on structure line measurement and technological require⁃ment for a certain type of ship[J].Marine Technolo⁃gy,2015(6):55-57(in Chinese).
[11]陈亚飞,汪益兵.海运固体散装货物的水尺计重[J].航海技术,2010(3):36-38.CHEN Y F,WANG Y B.Discussion on the calcula⁃tion of draft survey in solid bulk cargoes[J].Marine Technology,2010(3):36-38(in Chinese).
[12]刘新建.船舶吃水检测系统的研究[D].大连:大连海事大学,2016.LIU X J.Research on draft detection system of the ship[D].Dalian:Dalian Maritime University,2016(in Chinese).
[13] 刘扬睿.进出口商品鉴定专业基础[M].北京:中国标准出版社,2007:151-188.
[14]胡竞中,张明明,刘刚.船舶排水量快速计算方法[J].船海工程,2016,45(4):16-18,23.HU J Z,ZHANG M M,LIU G.A quick calculation method of vessel's displacement[J].Shipamp;Ocean Engineering,2016,45(4):16-18,23(in Chinese).
[15]张庆庆.导波雷达液位计测量技术研究[J].仪器仪表用户,2017,24(3):23-27.ZHANG Q Q.Study on measurement of guided wave radar level gauge technology[J].Instrumentation,2017,24(3):23-27(in Chinese).
[16] 中华人民共和国国家进出口商品检验局.进出口商品重量鉴定规程水尺计重:SN/T0187-1993[S].北京:中国标准出版社,1994.
Application of ranging technique of radar level meter for draft survey
SHEN Yijun1,LI Bo2,WANG Penghao2
1 Zhoushan Entry-Exit Inspection and Quarantine Bureau,Zhoushan 316000,China
2 College of Marine Science and Technology,Zhejiang Ocean University,Zhoushan 316004,China
[Objectives]This paper aims to solve the problems of the high subjectivity and low accuracy and efficiency of draft surveying relying on human visual inspection.[Methods]Radar-level oil and liquid measurement technology products are widely used in the petrochemical industry.A device is developed that uses radar to survey the draft of a boat,designed with data series optimization formulae to ensure that the data results are true and correct.At the same time,a test is designed to prove the accuracy of the results.[Results]According to the conditions of the ship,the device is composed of a radar sensor,triangular bracket and display,and is put to use in the test.[Conclusions]With 15 vessels as the research objects,the comparison experiment shows a difference in range between 0.001-0.022 meters,with an average difference rate of 0.028%,which meets the requirements for ship draft survey accuracy.
radar level meter;ship draft;draft survey
U693.4
A
10.3969/j.issn.1673-3185.2017.06.020
http://kns.cnki.net/kcms/detail/42.1755.TJ.20171128.1108.020.html期刊网址:www.ship-research.com
沈益骏,李博,王鹏皓.雷达液位计测距技术在船舶水尺计重中的应用[J].中国舰船研究,2017,12(6):134-140.
SHEN Y J,LI B,WANG P H.Application of ranging technique of radar level meter for draft survey[J].Chinese Journal of Ship Research,2017,12(6):134-140.
2017-07-23 < class="emphasis_bold"> 网络出版时间:
时间:2017-11-28 11:08
沈益骏,男,1982年生,工程师。研究方向:进口大宗散货检验鉴定。
E-mail:240917869@qq.com
李博(通信作者),男,1985年生,博士,副教授。研究方向:海洋数值模拟。
E-mail:269671379@qq.com
