LabVIEW助力FRC机器人比赛
2017-12-11王喆弘
王喆弘

去年寒假,我有幸参加了FRC机器人比赛。比赛中,我主要负责软件编程。通过本次比赛,我不仅掌握了计算机语言LabVIEW的编程,还了解了机器人中软件与硬件相互配合的原理。
以下是我学习和使用LabVIEW编程的过程,分享给大家。
第一步——学习LabVIEW的简单操作
LabVIEW是图形化编程语言,易于新手学习。打开LabVIEW,见图1,选择Blank VI创建一个新的面板进行学习。首先看到的是前面板和后面板。前面板用来显示程序运行结果,后面板则是编写程序的地方。两个面板可通过Ctrl+E进行快速切换,使编程更加高效。切换到后面板后,我们可以在这里尽情地创作。
单击鼠标右键,会出现许多菜单和选择,比如结构框、计时器、数组等。在菜单上选择所需的元件,在后面板的空白处单击鼠标即可将此元件放置其中,然后将有关联的元件连接,再到前面板上运行,就能看到程序的运行结果。
第二步——认识机器人硬件
软件编程是为了控制硬件运动,所以我需要知道机器人上有哪些部件需要编程。通过讨论与学习,我最终确定编写两个手柄、四个驱动电机、三个大功率电机的程序。
别看需要编程的硬件少,但要实现多种功能,编程量可不小。
第三步——机器人的初始化
将程序编写在FRC官方所给的模板里,最终将整套程序导入机器人的主控板即可。
首先打开官方所给模板,进入初始化模块,在其中设置三个大功率电机和两个手柄的初始化。由于驱动电机负责驱动机器人,所以將四个驱动电机归为一组,设置为一个Drive元件,再连接信号输入和输出元件即可。
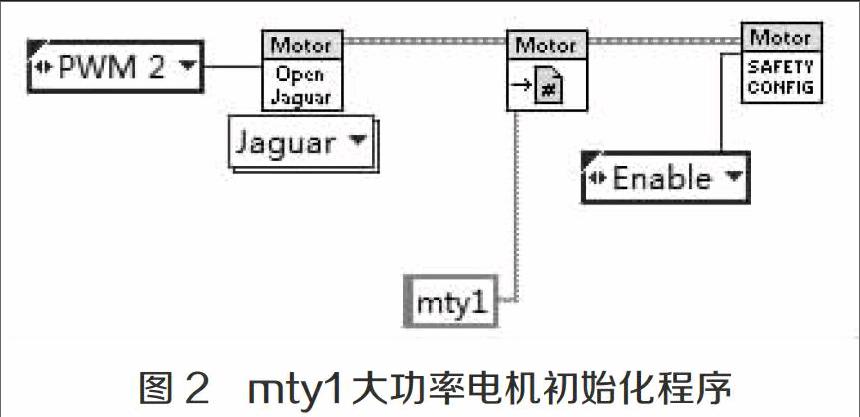
其次拖出三个电机设置元件,分别连上信号输入与信号输出元件,再将电机分别命名为mty1,mty2,mty3。mty1大功率电机初始化程序如图2所示。手柄初始化同理。
第四步——机器人的自动与手动控制
进入自动模块,插入顺序框,在第一个框内设置驱动电机的运行,与初始化类似,不过拖入的是驱动电机的运行元件,连接信号输入元件与信号传回元件。第二个框内设置大功率电机mty1,和第一个框类似。
进入手动模块,手柄的信号分为模拟量与布尔量。通俗来说,模拟量可以连续变化,就是手柄上摇杆的输出信号,而布尔量则只有true或false两个选择,就是手柄上按钮的输出信号。
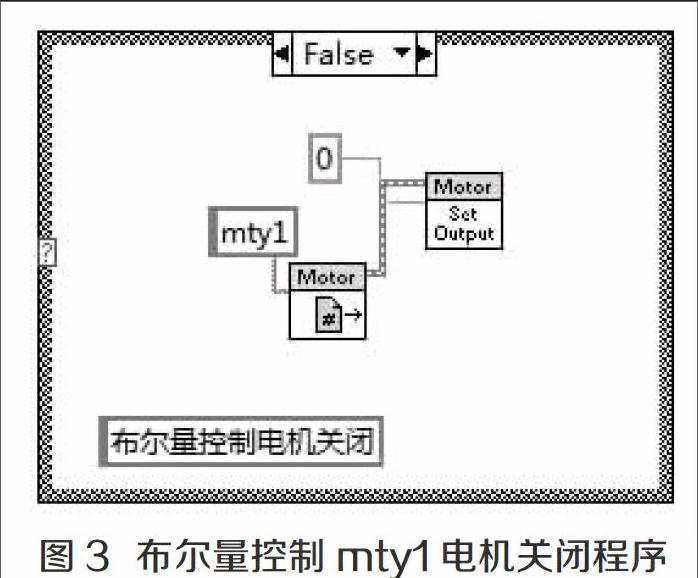
手柄信号进入手动模块后,模拟量直接控制机器人行动,而布尔量则连接判断框。当判断框的选择为true时,对应按下按钮,将电机设置为运行,也就是将电机的功率调到1。若判断框的选择为false,对应松开按钮,将电机设置为不运行,也就是将电机功率设为0。布尔量控制mty1电机关闭程序,如图3所示。这样自动和手动控制都已编写完成。
第五步——行动,机器人
将程序导入主控板,连接机器人无线信号,打开控制面板,连接手柄。通过手柄控制,机器人真的动起来了。重新设置参数后,机器人行动更加流畅了。看到这一幕,队友们欢呼起来!参赛机器人如图4所示。
我们通过计算机语言赋予了机器人灵活运动的能力,让它帮助我们完成一些难以做到的事情,多么神奇!endprint
