驾驶疲劳检测系统的研究与设计
2017-12-05郭昕刚
郭昕刚,李 航
(长春工业大学 计算机科学与工程学院,长春 130012)
驾驶疲劳检测系统的研究与设计
郭昕刚,李 航
(长春工业大学 计算机科学与工程学院,长春 130012)
采用基于驾驶员驾驶操作行为及车辆行驶状态的方法研究驾驶疲劳问题,阐述了系统识别的原理,取车辆转向、座椅压力分布、座椅压力分布不对称系数Cu作为驾驶疲劳的识别特征指标。利用模块化思想,设计了系统的硬件/软件部分,对采集的数据利用设计的驾驶疲劳识别算法进行分析,确定方向盘动作频率和座椅压力变化情况与疲劳状态的相关性。
驾驶操作行为;车辆行驶状态;压力分布不对称系数;模块化;驾驶疲劳算法
0 引言
随着现代交通运输业的快速发展,世界机动车保有量逐年递增,给人们生活带来便利的同时,由此引发的交通事故增长也成为了全球共同面临的严重问题。全世界每年因道路交通事故死亡的总人数超过60万,世界卫生组织的研究表明:交通事故是人类死亡的第二大要因,占各种事故死亡人数的比重最大,也是造成中青年人死亡的最主要原因。道路交通事故频繁发生给人们带来痛苦的同时也造成了巨大的经济损失,大约占到各国国内生产总值的1%~1.5%。由于驾驶疲劳引起的道路交通事故也大幅增长,严重威胁人们生命财产安全。2007年,全国直接由驾驶疲劳导致的交通事故死亡人数达到交通事故致死总人数的2.16%。驾驶疲劳影响驾驶员的反应及操作能力,多数驾驶疲劳事故是由于疲劳导致反应慢、注意力分散、操作不当等原因引起的。ITS技术的快速发展为道路交通安全问题的解决提供了一条新的思路,它将先进的信息技术、通信技术、控制技术、传感器技术和系统综合技术应用于道路交通安全领域,可以为驾驶疲劳研究提供有益的技术支持。利用ITS技术,采用先进的传感器、信息处理、系统集成、模式识别等诸多方面的技术,结合驾驶疲劳研究成果,对驾驶员驾驶过程中疲劳状态进行识别并预警可以有效提高驾驶行为的安全性,减少道路交通事故的发生。
1 系统总体设计
本系统将疲劳驾驶分为两种情况:轻度疲劳驾驶和重度疲劳驾驶。轻度疲劳驾驶的危害相对而言较低,重度疲劳驾驶则对驾驶员的生命安全有较大威胁,本系统主要是针对重度疲劳驾驶进行研究和识别。
重度疲劳驾驶会产生睡眠与昏迷行为,本系统的研究思路为找到驾驶人睡眠前与睡眠后的差异值,并将该差异值作为本系统检测的特征值。测试数据如下:
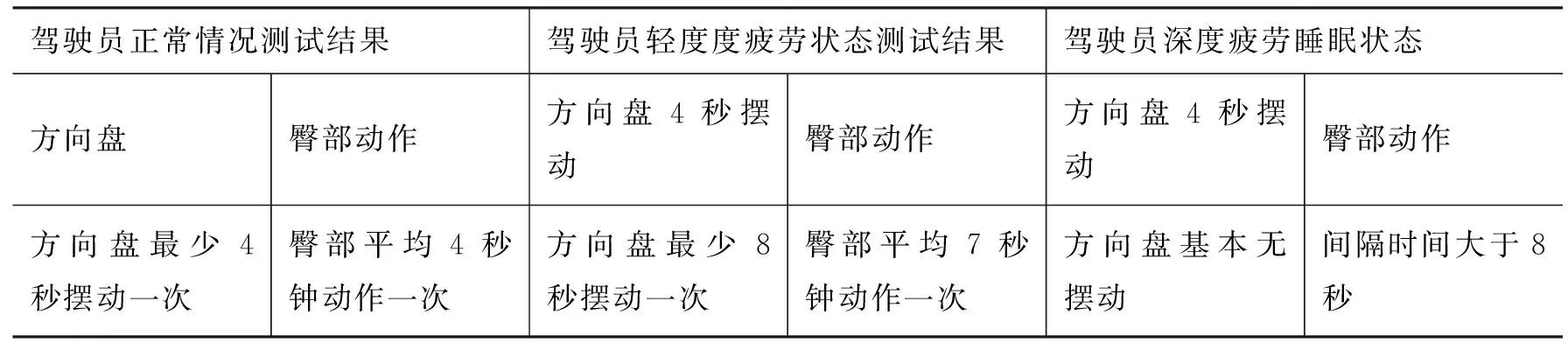
表1 系统检测特质
按照数据统计结果,分别选取方向盘动作情况、驾驶员臀部动作情况作为检测项,基于以上检测点找出深度疲劳驾驶的特征值。本系统依据驾驶操作行为及车辆行驶状态信息判断驾驶员驾驶状态,因而,首先要确定系统需要采集的信息,再根据所需信息确定采集的方式,设计系统的硬件和软件部分,然后采集识别疲劳所需的信息,最后对采集的信息进行处理并实现驾驶疲劳的识别。本系统的采集指标项为方向盘转向情况、臀部动作情况。根据采集指标的种类、采集精度、数据处理及传输要求设计驾驶疲劳识别系统的硬件部分,然后设计相应的软件,实现对驾驶操作行为及车辆行驶状态信息的采集和传输。最后采集识别驾驶疲劳的上述相关数据,并对其进行分析、识别。整个系统可以分为信息采集单元(车体转角检测、人体坐姿检测)、主控单元,其中主控单元通过采集模块反馈回的信息,进行疲劳判别,反馈识别结果并发出报警。驾驶疲劳识别系统总体结构如图1所示。
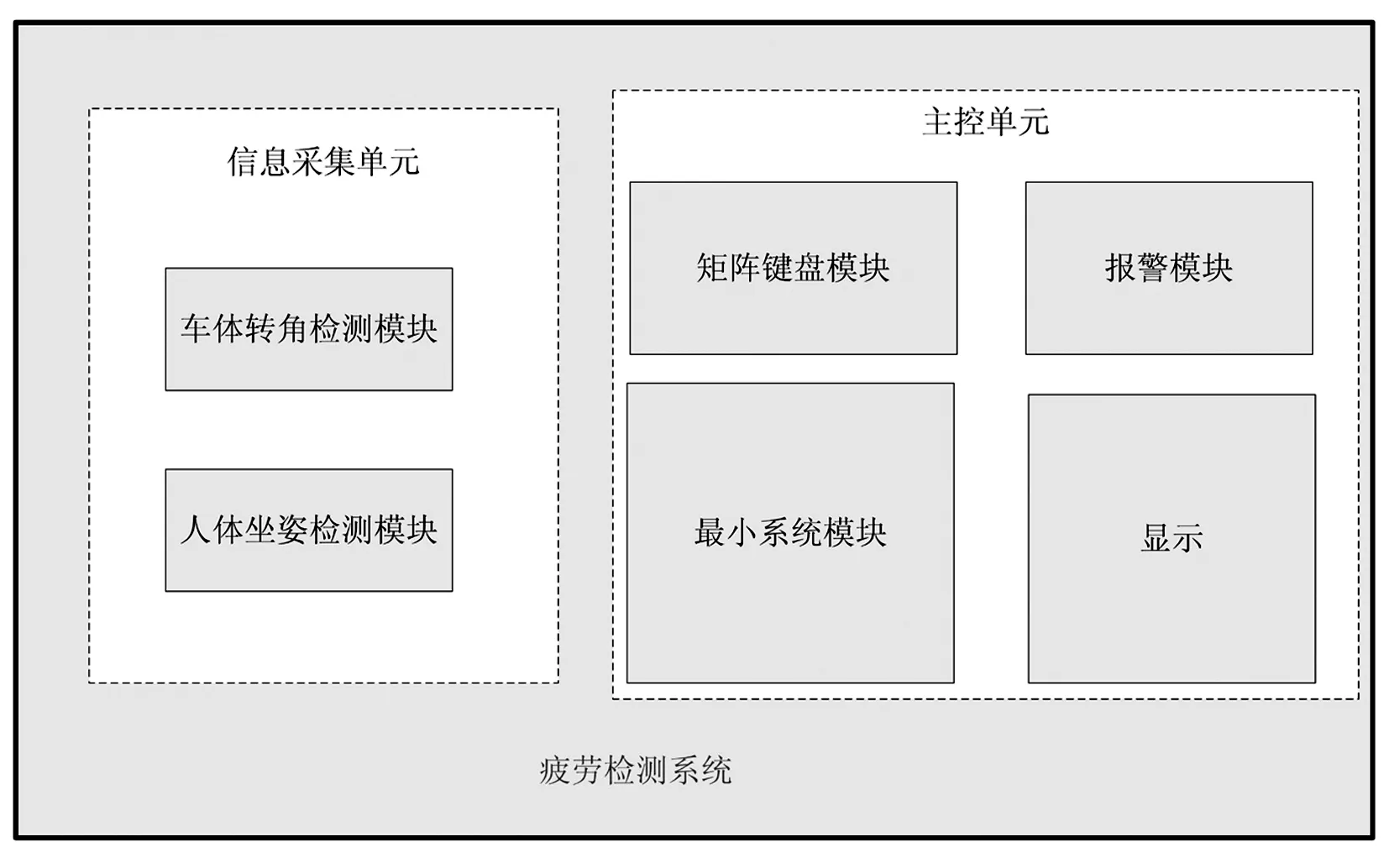
图1 机动车驾驶疲劳识别系统总体结构框图
2 系统硬件设计
本系统硬件部分可以分为两个相对独立的单元:主控制单元和信号采集单元。资源框图如图2所示。机动车是整个系统的实现载体。信号采集模块采集驾驶员的驾驶操作行为以及车辆行驶状态信息,并进行A/D转换;主控制模块是系统的核心,对输入信息进行处理,并控制输出报警信息。
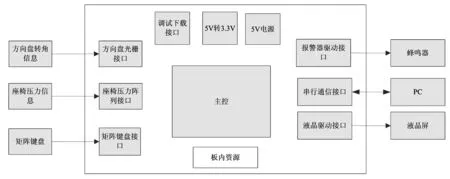
图2 系统硬件资源框图
2.1 主控制单元
主控制单元是驾驶疲劳识别系统控制和处理的核心,由液晶显示、矩阵键盘、调试接口、阵列驱动、电源驱动模块、调试模块、报警模块组成,完成信息采集、状态显示、疲劳判别、调试、报警功能。对芯片的选择决定了系统信息采集和疲劳识别的准确率及效率。由于本系统设计的最终目的是对机动车驾驶疲劳实现实时判别,要求处理芯片有较高的运算和处理能力,选用现流行的飞思卡尔公司推出的K60作为主处理芯片。
2.1.1 液晶显示模块
该模块是一个人机交互界面,用于完成系统状态的显示。本模块采用Nokia5110作为液晶显示模块,采用串行SPI接,84×48 的点阵LCD可以显示4 行汉字,工作电流仅为200uA,非常适合对功耗要求过高的场合。液晶显示模块原理图如图3所示。经过试验证明,VCC可以使用5V或3.3V。
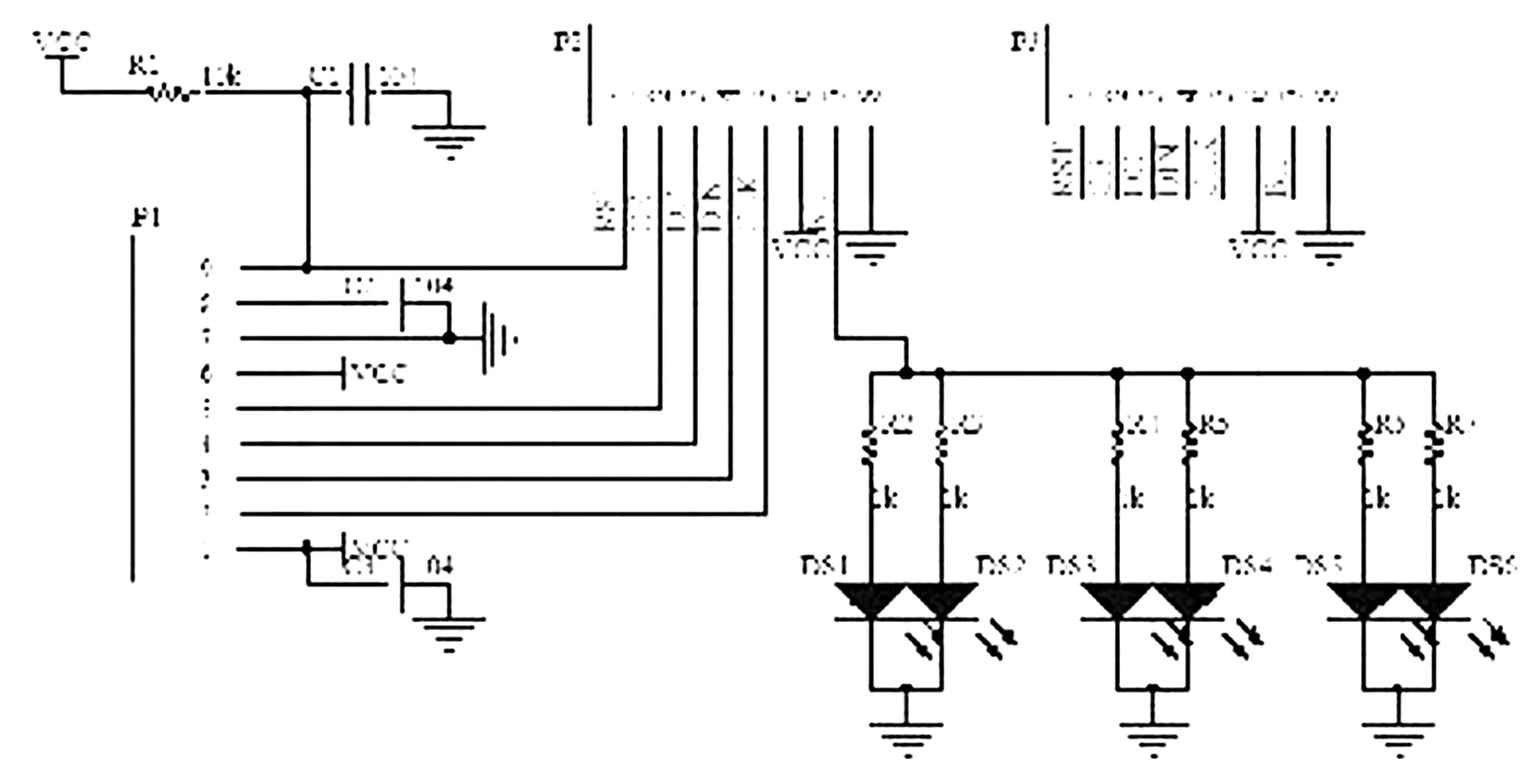
图3 液晶屏原理图
2.1.2 矩阵键盘模块
矩阵键盘模块是一个人机交互装置,用于系统的模式选择和参数设置。该模块用于人机交互界面,完成状态输入,该器件仅需8个IO口,可实现16位输入,性价比极高。
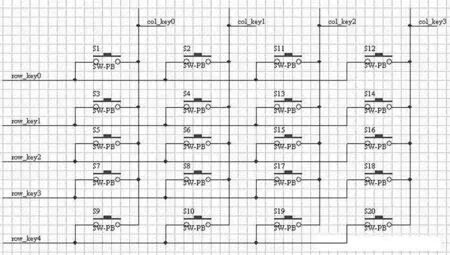
图4 矩阵键盘模块原理图
2.1.3 最小系统模块
最小系统模块用于完成逻辑控制、数据采集、实现疲劳识别算法。最小系统选取Kinetis K60作为主MCU,主频180M,144引脚,包含DSP模块,适合疲劳识别算法。最小系统原理图如图5所示。
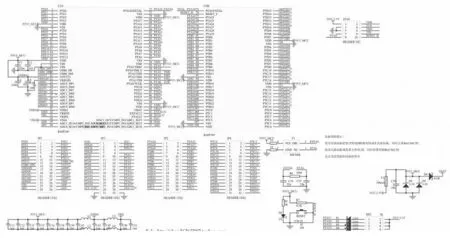
图5 最小系统原理图
2.1.4 压力采集驱动模块
压力采集驱动模块用于采集压力阵列值,反映驾驶员臀部对座椅的压力变化。选取薄膜压力传感器作为矩阵压力阵列的压力最小单元,该薄膜压力传感器压力分为100g到10KG,满足本设计系统的使用要求。
2.1.5 报警模块
本模块选取蜂鸣器作为报警器件,通过声音报警提醒驾驶员注意。蜂鸣器发声的原理是:电流通过电磁线圈时会产生磁场,而磁场可以驱动振动膜振动,从而发出声音报警。DSP的PWM2端口控制蜂鸣器发声,一般DSP引脚的输出电流小,PWM2脚输出的电平不能驱动蜂鸣器,所以电路设计时通过一个C9013三极管放大驱动蜂鸣器。蜂鸣器正极接+5v电压,负极接三极管的E极(发射级),PWM2经过10K的限流电阻Rl接到三极管B极(基极),C极(集电极)接地。当PWM2为高电平时,三极管处于截止状态,无电流通过蜂鸣器,不发声;当PWM2为低电平时,三极管处于导通状态,电流通过蜂鸣器,形成回路,蜂鸣器发出声音报警。因此,当检测到驾驶员处于疲劳状态时,可以通过程序控制PWM2引脚输出低电平驱动蜂鸣器发出报警声音提醒驾驶员注意。通过改变PWM2引脚的输出电压的波形可以控制蜂鸣器发出的声音,使蜂鸣器不停发出报警声,也可以通过改变PWM2引脚输出电平的占空比来控制蜂鸣器发出声音的大小。报警模块原理图如图6所示。
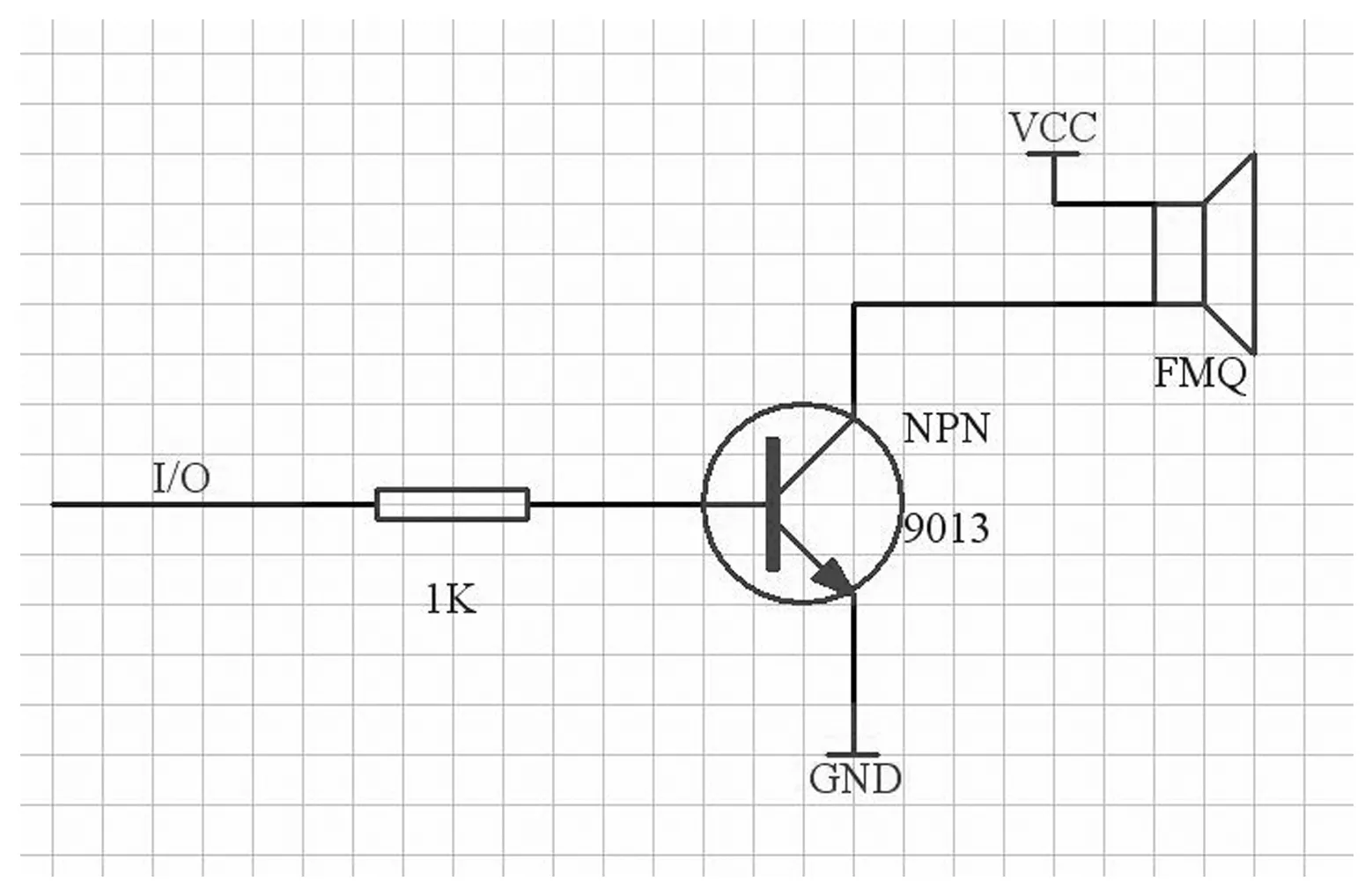
图6 报警模块原理图
2.1.6 电源模块
电源模块用于单元供电及电平的转换。传感器的电压为5V和12V,主控芯片电压为3.3V,主控芯片内核电压为1.8V。普桑车可以输出12V直流电压,而系统各部分需求的电压不同,所以需要设计电平转换电路实现对系统供电。首先要得到5V的电压。L7805是SGS-THOMSON公司生产的专门用于电压转换的芯片,可以将8~25V电压转换为5V电压,芯片共有三个引脚,输出稳定,是目前常用的电压转换芯片。主控模块的实物图如图7所示。
图7 主控模块实物图
2.2 信号采集单元设计
信号采集单元需完成方向盘、座椅压力两项检测项。
2.2.1 方向盘转角检测项硬件组成
该硬件系统由三部分组成:码盘组件、延长线、板内信号采集模块。其中码盘组件为机械部件,与方向盘形成1:10的转角比例变化,即方向盘旋转一圈,该码盘旋转10圈,码盘选取100光栅盘,这样方向盘旋转1圈,该组件可反馈1000个信号脉冲,理论值达到0.36度检测精度,完成小于0.5度检测指标。对方向盘转向用光耦进行监测。方向盘检测实物图如图8所示。

图8 方向盘检测实物图
2.2.2 座椅压力检测项硬件组成
该硬件系统由三部分组成:薄膜压力传感器阵列、延长线、板内信号采集模块。薄膜压力传感器阵列,压力传感器为Tekscan公司最新推出的薄膜压力传感器,直径1英寸(2.54cm),拥有更好的柔韧性,为产品研发设计测力提供了更理想的选择。它的超薄设计,可以插入几乎任何相贴的平面进行测量。本压力检测阵列,分布压力满足人体压力特征,左右两侧和后方的压力阵列可反映左右臀部的压力变化,前侧两个传感器可反映左右腿部动作变化。压力分布检测图与压力分布实物图如图9所示。
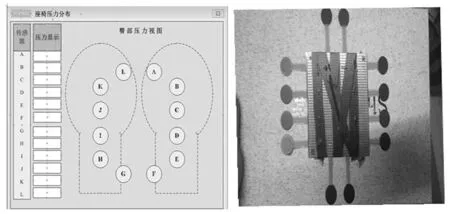
图9 压力分布检测图与压力分布实物图
通过驾驶员对座椅的压力判断驾驶员疲劳状态主要是经过对压力采集点的压力值进行处理,确定驾驶员是否处于疲劳状态。通过实验-统计方法建立预测模型,对驾驶员大腿及臀部左右取对称采集点,当驾驶员处于疲劳驾驶状态,对座椅产生的压力会有不均匀现象发生,用压力分布不对称系数Cu来表示。人体的不同坐姿会对压力分布造成一定影响,不对称系数用来表示压力分布的不对称程度,用来检测驾驶员坐姿状态。
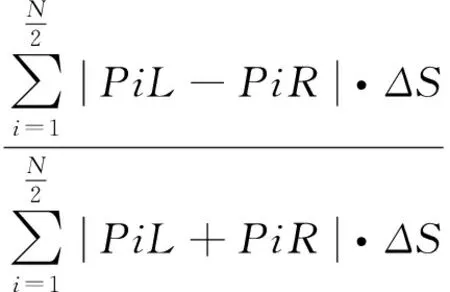
N为压力采集点的总个数,PiL是左侧压力传感器采集点压力值,PiR是右侧压力传感器采集点压力值。显然0Cu1,当Cu=0时,两侧压力对称,表明驾驶员坐姿处于正常状态,试验数据证明Cu的值在8S左右一直大于0.5时,驾驶员被判定为疲劳状态。同时驾驶员大腿两侧因为脚部的操作,对座椅的压力变化较为频繁,结合压力分布不对称系数Cu和腿部压力变化可以更加精确判定驾驶员驾驶状态。
3 驾驶疲劳识别算法设计
为了实现通过驾驶操作行为及车辆行驶状态信息识别机动车驾驶员驾驶疲劳程度的日常化,需要按照一定周期采集方向盘转向变化状态、座椅压力变化状态等相关信息。由于条件限制,无法在真实道路上进行测试,数据在驾驶模拟器上实验得出。实验正式开始后分为三个阶段进行,总时长为6小时左右。实验的第一阶段:驾驶员在汽车驾驶模拟器上进行120min不间断驾驶,然后下车测试,继续第二阶段实验。实验的第二阶段:驾驶员继续在驾驶模拟器上进行120min不间断驾驶,然后下车测试,继续第三阶段实验。休息10min后开始实验的第三阶段:驾驶员在驾驶模拟器上进行120min不间断驾驶,然后下车测试,实验完成。试验中记录方向盘的转向和座椅压力分布,采样周期为100ms。
方向盘转向角度信息:由于对数据进行处理时关心的是方向盘是否小幅度动作,并不关心转向角度的大小,所以方向盘的实际输出值为0~65535周期计数,该值测量通过光栅反馈光耦计数累加而成,角度对应关系为1000个数360度旋转一周。
座椅压力动态信息:通过12个分布压力传感器反馈座椅的压力,该测量值只需反馈压力的变化情况无需测量时间的重量,因此该压力值变化范围为0~255。根据直观的压力值变化并结合不对称压力分布系数和腿部压力值变化频率来判定驾驶员驾驶状态。
通过该算法分析采集的数据发现,在实验的第一阶段方向盘的静止时间最短为3.1s,座椅压力不发生变化的最短时间小于3.0s。第三阶段方向盘和座椅压力变化时间均大于8.0s,为深度疲劳驾驶的一个重要特征值,但该特征值只能大概判断驾驶员驾驶状态发生暂时停顿,并不能准确证明驾驶员处于疲劳状态。结合不对称压力分布系数Cu的值,判断Cu是否长时间大于1阈值能更精确判定驾驶员的驾驶状态。
4 结论
通过本驾驶疲劳检测系统可以检测出驾驶员在驾驶过程中的疲劳状态,可以通过系统数据判断出驾驶员处于正常驾驶状态或者是轻度/重度疲劳驾驶状态,当驾驶员处于重度疲劳驾驶状态时,系统能发出警报以警示驾驶员,起到了保障驾驶员行车安全的作用,经实验证明系统实际可用性较高。
[1] 韩相军. 基于DSP的驾驶疲劳实时检测系统研究[D].北京:首都师范大学, 2006.
[2] 胡鸿志. 机动车驾驶疲劳识别系统研究[D].武汉:武汉理工大学, 2010.
[3] 焦昆, 李增勇, 王成焘. 形成驾驶疲劳的理论分析与系统建模[J]. 汽车科技, 2002(6):13-15.
[4] 彭军, 何伟锋, 杨迎泽. 嵌入式列车司机驾驶疲劳检测系统设计[J]. 计算机工程与应用, 2009,45(33):57-59.
[5] 郑培, 宋正河, 周一鸣. 机动车驾驶员驾驶疲劳测评方法的研究状况及发展趋势[J]. 中国农业大学学报, 2001, 6(6):101-105.
责任编辑:程艳艳
ResearchandDesignofDrowsyDrivingDetectionSystem
GUO Xingang, LI Hang
(College of Computer Science and Engineering, Changchun University of Technology, Changchun 130012, China)
This paper researches the driving fatigue problem based on drivers’ operation behavior and the status of the vehicle driving, elaborates the principles of system recognition by using the vehicle steering, the pressure distribution of seats, asymmetry coefficientCuof pressure distribution of seats as the characteristic indexes of driving fatigue recognition. By using the advantages of modularization thought, it designs the hardware part and software part, and analyzes the collected date by driving fatigue recognition algorithm to confirm the correlation between steering wheel frequency and change of seat pressure and fatigue status.
driving operation behavior; status of vehicle driving; asymmetry coefficient of pressure distribution; modularization; driving fatigue algorithm
2017-04-11
郭昕刚(1979-),男,吉林长春人,副教授,硕士,主要从事嵌入式方面研究。
TP183
A
1009-3907(2017)10-0001-06
