PID型云模型控制器在电子节气门中的应用
2017-12-01李飞,李众
李 飞,李 众
(江苏科技大学电子信息学院,江苏镇江212000)
PID型云模型控制器在电子节气门中的应用
李 飞,李 众
(江苏科技大学电子信息学院,江苏镇江212000)
针对汽车电子节气门具有很强的参数不确定性、时变性和非线性,难以建立准确的数学模型等特点,采用了一维云模型和常规PID相结合的控制方法建立了节气门控制器,分别运用PID型云模型控制器和常规PID控制器对节气门模型进行仿真;最后,通过Matlab/Simulink仿真实验,结果表明与常规PID控制器相比较,PID型云模型控制器能够显著提高节气门的快速性、稳定性和鲁棒性。
云模型;常规PID控制算法;电子节气门;Matlab/Simulink
常规汽车电子节气门为油门踏板与节气门门体机械地相连,这一系统正在被汽车电子节气门所取代,汽车电子节气门控制器(Electronic Throttle Controller,ETC)的控制目标是希望节气门门体能够迅速且超调小的到达期望角度;通过分析门体位置信息,综合汽车其他控制信号如发动机转速、工作负荷等,使节气门控制器能够精确的控制节气门门体开度,从而改善燃油经济性、驾驶性能和排放性能。
电子节气门控制器早期运用的是常规PID控制算法,但是常规PID控制器并没有考虑非线性因素的影响,整个系统的稳定性和鲁棒性实际上没有得到可靠的保证。为了提高节气门的控制速度及其精度,目前其控制策略发展方向是将常规PID控制算法和现代控制算法相结合的思路。云模型(Cloud Model)是一种新兴的人工智能控制算法,云模型控制算法不要求给出被控对象准确的数学模型,同时保留被控对象及其环境中各种未知的不确定因素针对汽车电子节气门具有多种非线性因素,把一维云模型控制器(One dimensional Cloud Model Controller CMC)与常规PID控制算法相结合,仿真结果表明该控制器较常规PID控制器能够明显改善节气门的控制效果,显著提高控制器的稳定性和鲁棒性。
1 电子节气门数学建模
1.1 电子节气门结构
电子节气门机械结构简图如图1所示,由直流电机、齿轮组、双复位弹簧、门体阀片和门体位置传感器等部件构成。

图1 电子节气门结构简图
其工作原理为门体采用直流电机为动力,在弹簧转矩与摩擦力矩(粘性、库仑摩擦)等多种力的合力下工作。
1.2 电子节气门模型
1.2.1 直流电机
直流电机的动态描述为线性直流电机标准数学模型,其数学模型依据基尔霍夫电压定律得出公式(1)、(2)、(3)[3-4]:

反向电动势为:

其中E为直流电机绕组回路工作电压,Vbat为电源电压,u(t)为PWM波占空比,Ra(t)为直流电机绕组电阻,L为线圈电感,Vb(t)为反向电动势,Kt为电机反向电动势系数,N为减速齿轮减速比,θ为节气门主轴转角。
1.2.2 复位非线性弹簧扭矩
门体阀片上的双复位弹簧在顺、逆两个方向上起作用,确保节气门在出现故障的时刻,门体可以回位到初始位置,这一过程被在节气门运行过程中称为“跋行”。复位弹簧扭矩在回位到初始位置附近的过程发生阶跃跳变,弹簧扭矩也随之发生了跳变,呈现非线性。其中弹簧扭矩方程为[5-6]:

其中Ts为复位弹簧扭矩,Ks为弹簧系数,D为弹簧补偿系数,θ0为初始位置节气门门体角度,θ为节气门转角。
1.2.3 非线性摩擦力矩
节气门门体在运动过程中受到的摩擦力矩相对复杂,其中粘滞摩擦和库仑摩擦为主要影响因素;其中,粘性摩擦力与节气门门体角速度成正比,则总摩擦力可以用公式(5)表示为[7-9]:

其中,ω为节气门角速度,Kd为粘性摩擦系数,Kf为库仑摩擦系数,Tf为摩擦总力矩。
把式(1)至式(5)结合起来,则可以得到节气门的非线性数学模型表达式(6)[10-12]:

2 电子节气门控制器设计
2.1 常规PID控制器
PID控制算法是现代控制技术较为经典的控制算法之一,由于PID控制器具有结构简单,参数易于调整,算法较灵活等特点,因此得到广泛的运用。PID控制器结构图如图2所示[6]。
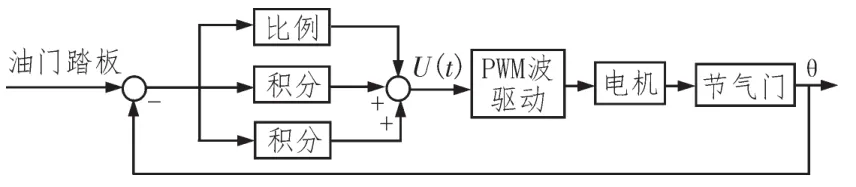
图2 节气门PID控制器结构图
图中油门踏板为实际输入控制量,e为输入控制量与实际输出量的偏差,U(t)为PID控制器的输出量,基于以上论述,基本PID控制器的理想数学表达式为[13-15]:

其中Kp为比例放大系数,Ki为积分时间常数,Kd为微分时间常数。
文献[1]中已经采用粒子群优化算法优化了节气门常规PID控制器,因此参考文献[1]中的Kp、Ki和Kd的数据进行阶跃、正弦和方波进行仿真,和PID型云模型节气门控制器在快速性、稳定性和鲁棒性做出对比。
2.2 PID型云模型控制器
2.2.1 一维云模型控制器(CMC)原理
云模型是一种实现定性概念与定量数据相互转换的不确定模型,它是由3个数字特征:均值(Ex)、熵(En)和超熵(He)组成,把概念的模糊性和随机性相结合在一起[6]。设U为一个精确数值表示的定量论域,C为U上的定性概念,若定量值x∈U,且x是定性概念C的一个随机实现,x对C的确定度μ(x)∈[0,1]是有稳定倾向的随机数,则x在U上的分布称为云模型,可以如式(8)表示[7]。

一维云模型控制器实现的是偏差输入量到控制器输出量的一种映射关系。一维云模型控制器由单条件多规则的不确定性推理和加权平均处理两部分组成,如图5所示的是具有N条件规则的一维云模型映射器,其形式化描述为:IFX=Xi,THENY=Yi。偏差输入e刺激着不同规则的前件部分CGX1:CGXN,产生不同的μNj值,再经过后件规则部分CGY1:CGYN,产生大量的云滴drop(yNjk,μNj),这些云滴经过加权处理,最后得到与输入e相对应的输出量u,这种关系即为e到u的云模型映射关系[8]。
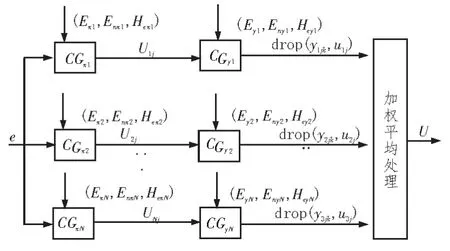
图3 一维云模型映射器
基于以上对一维云模型的论述,一维云模型映射器的算法实现步骤如下[8-9]:
输入:根据图3所示一维云模型规则库第i条规则的前件部分和后件部分的云模型特性参数分别为(Exxi,Enxi,Hexi)和(Exyi,Enyi,Heyi),前件论域U1中输入与输出的偏差e;
输出:后件论域U2的输出u;
步骤:
①设定i的初值为1;
②生成期望值Enxi,标准差Hexi和一维正态分布随机数Pxi;
③计算x对第i条的推理规则的激励度:μi=exp(-0.5(xi-Exi)2/P2xi)
④生成期望值Enyi,标准差Heyi和一维正态分布随机数Pyi;
⑤若x<Exxi,那么;
若x≥Exxi,那么;
⑥若i<N,那么i=i+1,返回步骤②,否则继续执行步骤⑦;
为一维云模型控制器的输出
2.2.2 PID型云模型控制器
在以上对一维云模型映射器的论述基础上,可以构造出图4所示的电子节气门PID型云模型控制器结构图。PID型云模型控制器将实现节气门开度偏差e、偏差微分ei和偏差积分ed分别到比例控制器输出up的映射、微分控制器输出ui的映和积分控制器输出ud的映射称为一维云模型映射器P,I和D;K1、K2、K3作为控制器的量化因子;K4作为驱动因子;P、I和D 3个一维云模型映射器均采用五规则推理;根据调试经验,前件规则和后件规则云模型的特性参数设定如表1所示。
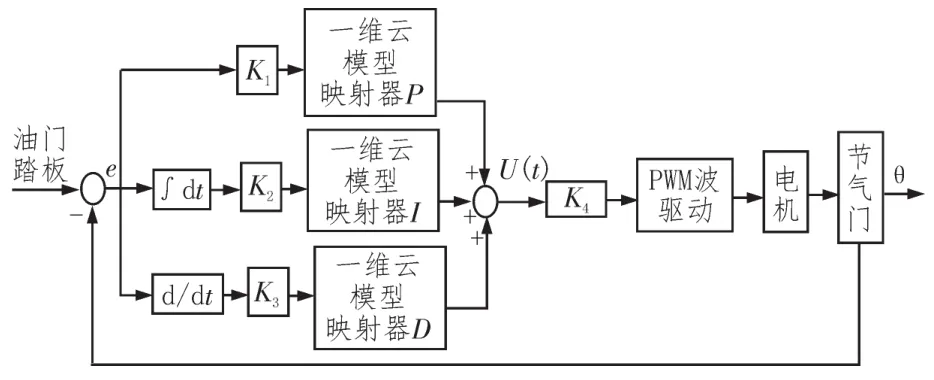
图4 节气门一维云模型PID控制器结构图
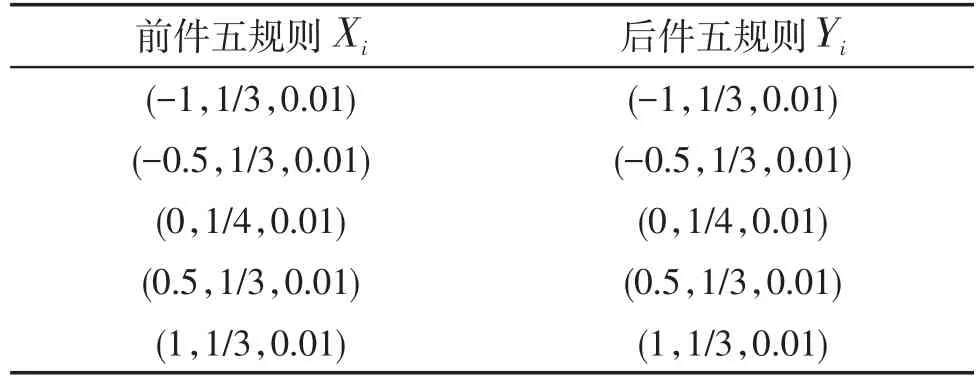
表1 云模型控制器的云参数
本文中设计的PID型云模型控制器的量化因子和驱动因子分别为K1、K2、K3和K4,根据调试经验,分别取1/80,1/80,1/80,40。
3 仿真研究与结果分析
以下将给出常规PID控制器和PID型云模型控制器对节气门数学模型仿真控制效果,节气门数学模型的各参数值见表2[5]。
为了验证所设计的PID型云模型控制器的快速性和稳定性。参考表2数据的基础上,节气门数学模型的输入信号分别采用阶跃、正弦和方波信号,仿真结果如图5所示,图中标识1、2分别是PID型云模型控制器和常规PID控制器对节气门的控制效果:
仿真结果表明,在阶跃信号输入时,从超调和响应时间上可以看出PID型云模型控制器明显优于常规PID控制器;采用正弦输入时,PID型云模型控制器在保证信号跟随性的同时,较常规PID控制器超调有明显的降低;采用方波信号输入结果亦是如此;稳态误差均可以稳定在2%以内;基于以上仿真结果可以总结得出PID型云模型控制器在快速性和稳定性明显优于常规PID控制器。

表2 节气门数学模型各参数

图5 方波输入跟踪结果
为了进一步验证PID型云模型控制器相较于常规PID控制器具有更好的适应性和鲁棒性,在更改节气门数学模型非线性因素参数的基础上,分别采用常规PID控制器和PID型云模型控制器对更改后的节气门数学模型进行仿真研究;更改后的节气门数学模型参数如表3,仿真结果如图6~7所示。
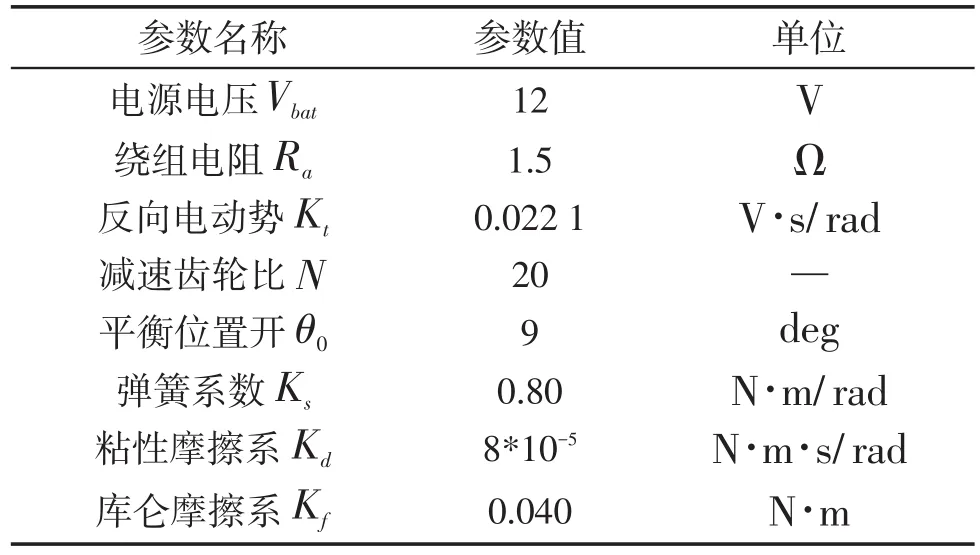
表3 更改后的节气门数学模型各参数
依据图6所示,标识1和2的曲线分别代表相同的常规PID控制器应用在更改参数后和未更改参数前的节气门数学模型响应曲线,可以看出常规PID控制器出现的明显的振荡和超调,响应时间延长;而根据图7所示,同样的用PID型云模型控制器控制两种节气门数学模型下的响应曲线并没有出现明显的差异;对比以上两组曲线,可以得出,PID型云模型控制器较常规PID控制器具有更好的鲁棒性和适应性。

图6 常规PID方波输入对比

图7 PID型云模型控制器方波输入对比
4 结 论
近年来我国在汽车电子行业发展较为迅速,汽车电子节气门仍然是一大研究热点。本文在对常规PID控制算法和云模型控制理论的研究基础上,将常规PID控制算法和云模型推理方法相结合起来并且运用在汽车电子节气门上,明显改善了节气门响应的快速性、稳定性和鲁棒性,具有较大的借鉴价值。
[1]聂耳双,李志鹏.基于粒子群算法的汽车电子节气门控制策略研究[J].森林工程,2012(6):47-49.
[2]怀泉,曹学铭,张乃斯,等.基于粒子群优化算法的模糊神经分数阶PID电子节气门控制器设计[J].燕山大学学报,2014,38(4):354-360.
[3]李超.基于观测器的输出反馈电子节气门控制器设计[D].吉林:吉林大学,2011.
[4]Das S,Pan I,etal.A novel fraction order fuzzy PID controller and its optimal time tuning based on integral performance indices[J],Engineering Application of Artificial Intelligence.2012,25(2):430-442.
[5]成煜,杭乃善,苏毅,等.基于云模型的线性网络二级电压控制分区及中枢点识别[J].华东电力,2014,42(5):886-892.
[6]毛亚峰.基于MATLAB/Simulink的电子节气门控制系统仿真[D].西安:长安大学,2012.
[7]高键,周海龙,李众.一维云模型控制器在平衡系统中的应用[J].计算机测量与控制,2011,19(11):695-698.
[8]陈昊,李兵.基于云模型的不确定推理.小型微型计算机系统,2011,12(12):143-145.
[9]李众,高键,张日勋.一维云模型系统的逼近性研究[J].自动化学报,2011,37(10):1190-1196.
[10]陈剑.汽油机电子节气门控制系统设计与控制[D].西安:长安大学,2011.
[11]陈虹,胡云峰,郭宏志,等.基于backstepping方法的电子节气门控制[J].控制理论与应用,2011,28(4):492-495.
[12]朱二欣.电子节气门控制系统的开发与研究[D].长春:吉林大学,2015.
[13]肖寿高.电子节气门控制系统研究与仿真[D].西安:长安大学,2011.
[14]徐久师.基于LabVIEW的电子节气门虚拟试验台的设计及试验研究[D].南京:南京林业大学,2014.
[15]郭辉,张振东,朱红萍.电子节气门控制策略研究[J].机械传动,2010,34(1):8-10.
Application about electronic throttle based on PID cloud model controller
LI Fei,LI Zhong
(School of Electronic and Information,Jiangsu University of Science and Technology,Zhenjiang212000,China)
As the automotive electronic throttle has strong parameter uncertainty,time⁃varying ,nonlinear and it is also very difficult to establish a precise mathematical model,which designs a throttle controller based on one dimensional cloud model and the conventional PID control algorithm and establishs one dimensional cloud model PID controller to control the models which are different from the spring torque and the friction torque.Using PID cloud model controller and conventional PID controller to simulate the throttle model.Finally,MATLAB/Simulink results show that by comparing with the conventional PID controller,the PID cloud model controller can significantly improve the throttle about the rapidity,stability and robustness.
cloud model;conventional PID control algorithm;electronic throttle;Matlab/Simulink
TN701
A
1674-6236(2017)22-0162-04
2016-09-19稿件编号:201609174
李飞(1989—),男,江苏南京人,硕士研究生。研究方向:汽车电子及其智能控制。
