石油石化设备巡检小车语音识别与控制系统设计与实现
2017-12-01王俊力冯锡炜孟菲
王俊力,冯锡炜,孟菲
(辽宁石油化工大学计算机与通信工程学院,辽宁抚顺113001)
石油石化设备巡检小车语音识别与控制系统设计与实现
王俊力,冯锡炜,孟菲
(辽宁石油化工大学计算机与通信工程学院,辽宁抚顺113001)
基于语音识别技术及控制技术,实现在石油石化设备工作环境下语音口令实时控制巡检设备、优化硬件设施以获最佳性能、提高石油石化设备的安全性能,降低安全隐患等目标。采用STM32系列芯片及LD3320语音识别芯片组成语音巡检小车控制芯片组,语音识别算法来分析口令传递给控制芯片,进而通过控制电机和舵机驱动小车模型运动,最终实现整个模型系统的语言识别与控制。通过在不同场地模拟多种不同石油石化设备工作环境,对语音识别精确率进行分析。得出巡检小车语音识别与控制系统可以达到预期目标的结论。
石油石化设备;语音识别;巡检小车模型;自动控制
石油石化行业生产设备具有数量多、工艺复杂、压力容器集中、生产连续性强、火灾危险性大以及意外事故频发等特点,一直是高风险集中的场所。而该环境下的工作人员活动空间狭窄且工作时工作人员需要进行设备调整[1],所以大型巡检设备无法进入场地或没有足够的时间去采集相关需求信息一直是业界为之头疼的问题。为了解决这些问题,结合当今人工智能技术飞速发展(如视频图像处理、音频处理等技术都已经广泛应用在日常的生活和工作之中)[2],文中主要的解决方法是通过设计一个不用手去进行遥控操作的设备,去完成相关功能[3-4]。
与机器通过语音进行交流,是人们一直以来的梦想,同时也更便捷。本文采用LD3320语音识别模块及配套的运动系统,实现对小车的运动状态(前进、后退和转向等动作)的控制,进而实现不用手去进行遥控操作的目标。
1 语音控制系统软件设计
1.1 语音识别软件设计
语音控制系统的软件部份包括LD3320语音识别程序和小车运动系统控制程序两部分。LD3320最多可支持动态编辑50条关键词语列表,利用语音的频谱特征(个人发音器官特性和发音习惯特性表现)在声纹频谱中的各种现象[5]。通过麦克风采集出来并识别成相应的文字符号最后将结果输出[6]。软件设置“指令口令”、“垃圾口令”和“前缀触发口令”来提高其语音识别的精度。LD3320经过通过初始化以后通过MIC接受外部的语音信息,这个过程进行计时(计时可以由使用者自行设定,本文设定为10秒)如果计时结束时没有接收到声音,则返回到接受口令,如果接受到声音则进行响应的算法匹配中。在算法匹配的过程中如果匹配到最佳结果,则将这一结果发送给对应的STM32F103Z芯片中。如果匹配失败则返回到接受口令重新接受口令。图1为语音识别程序流程图。
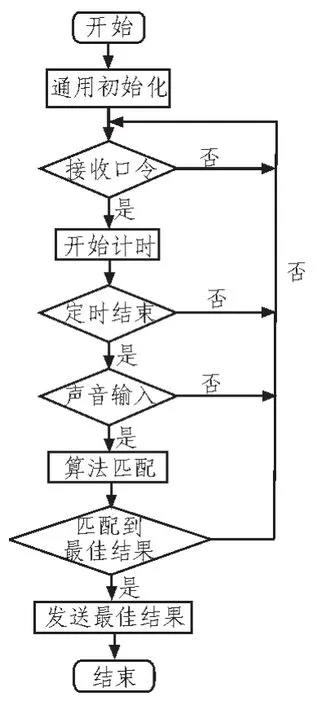
图1 语音识别程序流程
1.2 语音识别系统
对于LD3320语音模块,从麦克风收集到的语音信息有两种,分别是对整个系统有用的“指令口令”和对整个系统运行无用的“垃圾口令”。例如,当用户说出“前进”(qianjin)口令,LD3320成功接收并处理,将响应的指令发送给其所在的STM32F103Z芯片[7]。整个语音识别的过程包括语音识别程序的初始化、使用ASR和预设的识别关键字列表共同对用户语音信息进行判断[8-9]。若识别过程成功则发送信息给下一个模块;若识别过程不成功则继续循环该过程。表1为语音识别关键词列表。
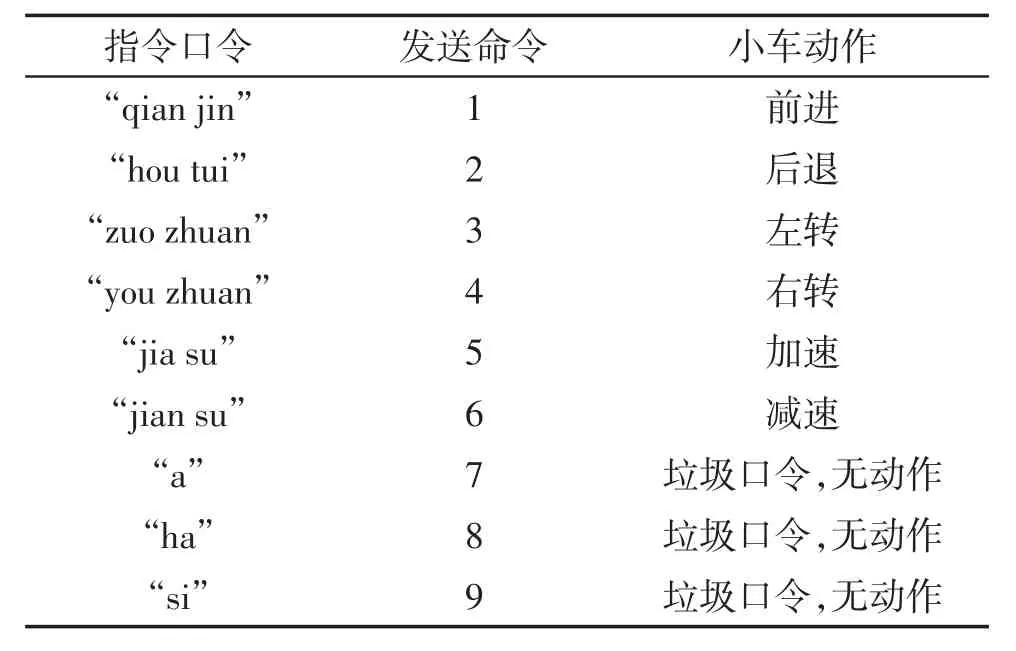
表1 语音识别关键词列表
为了提高语音识别的准确率,除了系统中的“垃圾口令”判断响应机制外,还添加了“前缀触发口令”模式,该模式用户可以根据自身所在的环境考虑是否启用。当用户启用该功能时须在使用某项功能前加入用户自定义的语句。例如,用户事先定义了“转向左”(zhuan xiang zuo)则在使用转弯角度功能的时候需要说出“转向左三十”(zhuan xiang zuo san shi),小车模型才能够进行相应功能的响应。表2为语音前缀触发口令关键词表。
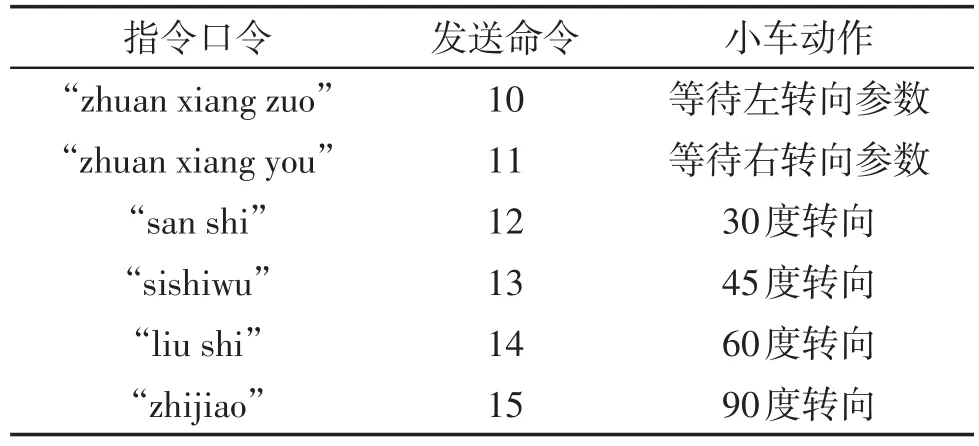
表2 语音前缀触发口令关键词表
1.3 微处理器间通信设计
该芯片进行处理后将该口令转化为标记语句[10]。首先储存在寄存器中,再通过通用异步收发传输器(UART)通信方式,将语音部份识别的信息发送给控制步进电机的STM32F103R模块、并存在对应模块的寄存器中,通过读取寄存器中的内容,进而控制步进电机的移动。若是垃圾词汇则经LD3320所在的STM32F103Z模块判断后[11],不进行响应。
1.4 方向舵机及步进电机软件设计
在控制舵机及步进电机方面,采用了脉冲宽度调制(PWM)与连接舵机及步进电机的电调及解码器进行信息通信,利用其所在的STM32F103R芯片输出的数字信号来对模拟电路进行控制,进而调节步进电机的速度和前进方向及舵机的摆动方向。其输出的是一个方波信号,信号的频率是由其预分频器所决定[12]。图2为舵机及步进电机程序流程。
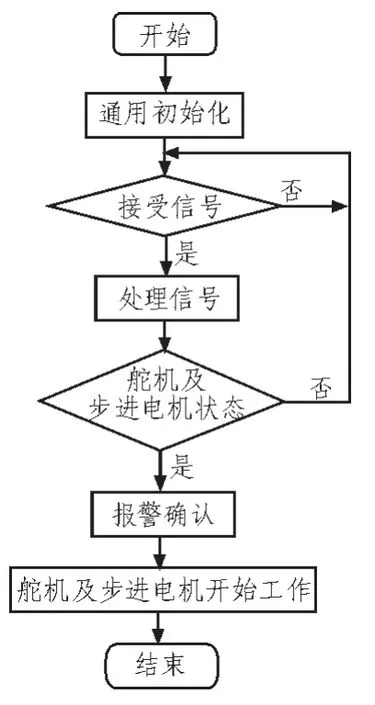
图2 舵机及步进电机程序流程
2 语音控制系统硬件设计
2.1 系统总体结构
语音控制小车模型的硬件处理芯片由两个微控制器STM32系列微控制器(型号分别为STM32F103Z和STM32F103R)组成,两个芯片分别连接语音识别模块LD3320和方向舵机及步进电机,构成整个小车模型的硬件系统[13]。其中型号为STM32F103Z微控制器与LD3320语音识别模块进行连接,微控制器通过串行外设接口(SPI)通信手段和LD3320语音识别模块进行数据传输,从而得到用户的口令并进行下一步的判断;另一个由型号为STM32F103R微控制器与方向舵机及步进电机连接。微控制器通过脉冲宽度调制(PWM)通信方式进行控制信号的传输,方向舵机及步进电机接收到信号后,将信号处理后使方向舵机及步进电机及时响应相应运动。图3为硬件系统方案设计。
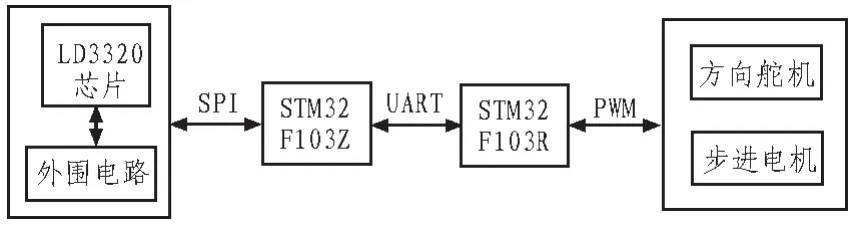
图3 硬件系统方案设计
2.2 语音识别系统结构
LD3320模块内部,由LD3320芯片、麦克风及配套电路组成[14-15]。工作原理为:首先麦克风接收到使用者的语音指令,转化为电信号通过电路传送到语音识别芯片LD3320中[16-17]。LD3320将该信号进行处理匹配后将语音识别结果通过串行外设接口(SPI)传输到STM32F103Z微控制器里[18];经过STM32F103Z处理后,和口令表中的命令进行匹配,将响应的信息通过线缆方式传输到STM32F103R微控制器里。

图4 语音识别工作原理
2.3 小车运动系统硬件结构
STM32F103R微控制器从STM32F103Z接受到信号后,进行信号判断得到对应的口令动作,将动作信息通过脉冲宽度调制(PWM)方式发送信号到方向舵机及步进电机。进而对小车的运动状态进行控制[19-20]。
3 石油化工企业的应用面实验
为了试验系统在实验室和非实验室环境的工作能力,实验采用两个环境,分别在室内实验室及室外操场,通过在室外操场实验模拟系统在石油化工企业环境下的工作状态,进行了语音识别功能的测试。
实验采用计算机播放录音的模式,将已录好的相同音量在不同距离依次播放前进(qian jin)、加速(jia su)、后退(hou tui)、左转三十(zuo zhuan san shi)、右转四十五(you zhuan sishiwu)、减速(jian su)等6个指令口令和语气音啊(a)、语气音哈(ha)、语气音(si)3个垃圾口令进行效果测试。在1.0m、1.5m、2.0m、2.5m和3.0 m五个距离段进行各200次实验,统计正确识别率、未识别率和误识别率。表3为语音命令识别率,数据如表3所示。

表3 语音命令识别率
4 结束语
文中结合语音识别与小车运动系统控制技术实现了对小车的非特定语音控制。其主要是将语音系统信息采集的语音模拟信号识别成相应的文字符号,最后将结果输出使相关设备进行响应。小车的功能还有很大的改造空间,比如在杂音下更加准确的识别语句及对长语句进行识别、分段等。
作为解放石油石化工作人员劳动力的研究,从我国石油石化设备系统的实际出发,通过语音方式控制小车的行进轨迹,进而通过搭载在小车上的传感器得到响应参数,提供相关设备及设备周边环境的参数,为石油石化设备安全巡检人员提供相关决策信息,进一步完善的灾害响应机制,为我们的石油石化行业提供更加人性化的设备与服务。
[1]马昆,任予鑫,秦奋勇.基于语音识别的综采自动化远程控制系统研究[J].价值工程,2014(30):223-224.
[2]罗宪华,徐海明.基于特定人的语音情感识别系统构建[J].中国人民公安大学学报(自然科学版),2015(4):72-75.
[3]周璐璐,邓江洪.一种机器人智能语音识别算法研究[J].计算机测量与控制,2014,22(10):3267-3273.
[4]赵甜甜,王梦娇,谢韬.基于LD3320的语音识别车配虚拟人系统的设计[J].信息化建设,2016(4):329.
[5]林暖辉,张伟颂,徐毓文.浅议声纹鉴定中噪声对语音频谱特征的影响及降噪处理[J].黑龙江科技信息,2015(36):129-130.
[6]马玉志,吴登娥.非特定人语音控制系统在家用电器中的应用[J].无线互联科技,2015(18):137-138.
[7]高远,祝玲,钟坤芳.语音与远程控制在汽车空调系统中的应用[J].科技与企业,2015(24):98.
[8]赵海君.语音识别的SVM模型选择分析[J].电脑知识与技术,2015,11(25):133-134.
[9]吕威,高飞燕.基于STM32的语音识别协助监护系统[J].科技创新与应用,2015(34):72.
[10]王江南,张福转,孔庆波,等.用于模拟飞行指挥系统的语音识别模块[J].兵工自动化,2015,34(12):29-32.
[11]杜希栋,王志伟,潘黎,等.基于LD3320的非特定语音控制小车设计[J].信息技术,2015(1):53-55.
[12]梁汉泉,陈锦彪.基于语音控制的人机交互智能系统研究[J].新技术新工艺,2015(9):84-86.
[13]马帅旗,张伟.基于语音识别的机车自动过分相装置的研制[J].陕西理工学院学报(自然科学版),2014,30(6):30-34.
[14]汤莉莉,马仟,黄伟,等.语音无线遥控智能小车设计[J].无线电工程,2014,44(12):66-69.
[15]邓宝安,吕志刚,杜晓斌.基于MCS-51单片机的新型门禁控制器设计[J].电子设计工程,2015,23(24):103-105.
[16]毛丽民,卢振利,谢新明,等.基于语音交互功能的医疗服务机器人控制系统设计[J].高技术通讯,2014,24(7):745-751.
[17]熊志辉,王仁波.基于STM32的智能学习台灯设计[J].电子世界,2016(8):160-161.
[18]易群,李彩丽.基于单片机的语音录放硬件电路设计与研究[J].机电信息,2015(36):130-131.
[19]蒋冬清,王一舒.LD3320语音芯片与单片机的通讯分析[J].科技创新与应用,2016(3):75.
[20]陈免慧,沈炜.嵌入式语音系统信息采集算法研究[J].工业控制计算机,2015,28(12):64-65.
Petroleum and petrochemical equipment inspection car voice recognition and control system
WANG Jun⁃li,FENG Xi⁃wei,MENG Fei
(School of Computer and Communication Engineering,Liaoning Shihua University,Fushun113001,China)
Based on speech recognition and control technology,in order to achieve real-time voice password control inspection equipment,optimize hardware facilitiesfor maximum performance in petroleum and petrochemical equipment working environment,eventually to improve the safety performance of petroleum and petrochemical equipment,the target of reducing the potential safety hazard.Using STM32 series chips and LD3320 speech recognition chip of speech inspection car control chipset,speech recognition algorithm to analyze the password is passed to the control chip,and then by controlling the movement of motor and steering gear to car model,finally realizes the whole model system of the speech recognition and control.Through simulating different petroleum and petrochemical equipment working environment in the different sites,analyzing the speech recognition accuracy.Thus,the inspection car voice recognition and control system can achieve the anticipated goal.
petroleum and petrochemical equipment;speech recognition;inspection car model;automatic control
TN6
A
1674-6236(2017)22-0074-04
2016-09-26稿件编号:201609230
辽宁省普通高等学校本科教育教学改革研究项目(UPRP20140914);辽宁省教育科学“十三五”规划立项课题(JG16DB253)
王俊力(1995—),男,辽宁锦州人。研究方向:模式识别。