基于免疫遗传算法优化的自调整PID控制器研究
2017-12-01张志柏朱敏
张志柏,朱敏
(常州信息职业技术学院江苏常州213164)
基于免疫遗传算法优化的自调整PID控制器研究
张志柏,朱敏
(常州信息职业技术学院江苏常州213164)
目前,传统自调整PID控制器回路中存在目的误差、平均误差和透过误差较多的现象,容易造成工艺数据控制不精确。为此,提出一种基于免疫遗传算法优化的自调整PID控制器研究方案。首先确定PID控制器系统硬件结构,采用免疫遗传算法对自调整PID控制器回路中的积分单元以及微积分计算进行优化,有效避免了目的误差的产生,使用交叉与变异算子调整比例单元以及比例微分单元,借鉴数据交叉适应度值有效控制系统出现稳定性差变、降低平均误差以及透过误差出现的概率,保证工艺数据控制精度,有效解决了上述问题。仿真实验证明,基于免疫遗传算法优化的自调整PID控制器能够对工艺数据进行高精度控制,具有实践意义,能为自调整PID控制器研究发展提供帮助。
免疫遗传算法;PID控制器;微分单元;比例单元;积分单元
自调整PID控制器具有硬件结构简单、鲁棒性好、操作简单快捷、系统稳定等特点,并且根据不同需求进行自定义设置,保证自调整PID控制器能够进行多功能匹配使用[1-2]。经过多年发展研究,自调整PID控制器功能已经比较完善,广泛使用在工业化温度控制、参数调整、模型构建、数据限定、规格保持等方面[3-4]。在自调整PID控制器的使用中,其使用效果好坏程度取决于其回路中的误差概率以及比例单元、积分单元、微积分单元,但是自调整PID控制器计算单元是一个复杂的连续的过程,传统的自调整PID控制器在进行计算的过程中,回路中会产生大量目的误差、平均误差、透过误差,这些误差的产生多由于比例单元以及调整控制系统搭配上的不均衡造成的[5]。随着科技的发展,工业进程的加快,许多先进的计算方法已经与自调整PID控制器互相结合,这样不但完善了自调整PID控制器功能同时也完善了工艺流程[6-7]。比如单纯方差计算方法、混沌优化函值法、神经网络控制方法、向量权值限量计算法等,都能够对自调整PID控制器进行一定的优化,但是上述计算方法中无法对比例单元以及积分单元进行调整,因此还不能进行全面的优化。但是免疫遗传算法可以进行单元化的调整,同时能够提高计算的结构层次,有效的避免误差的产生。综上所述,本文提出一种基于免疫遗传算法优化的自调整PID控制器,通过免疫遗传算法,对上述的比例单元进行优化,保证了计算的准确性,避免了目的误差以及透过误差的出现,通过交叉与变异算子的调整,有效的避免平均误差的出现[8-9]。为验证本文设计的基于免疫遗传算法优化的自调整PID控制器的有效性,文中还设计了对比仿真试验,通过实验数据表明,文中设计的基于免疫遗传算法优化的自调整PID控制器,能够有效的解决上述的误差问题,提高自调整PID控制器工艺参数控制能力。
1 整体设计
1.1 硬件设计
自调整PID控制器的硬件系统主要由PID控制器、数据解调器、数据转换器、配比电源、高集成电路板组成,其中PID控制器能够控制比例单元、积分单元、微分单元3个环节[10-11],自调整PID控制器在进行系统运行的过程中数据的控制量为r(t),y(t)为自调整PID控制器硬件系统的输出量,自调整PID控制器的硬件组合流程是按比例单元、微分单元和积分单元进行组合控制的[12-13],其控制结构如图1所示。

图1 PID控制器硬件系统结构图
1.2 运用免疫遗传算法进行单元修正
遗传算法是一种人工智能的搜索性随机仿真算法,主要特点是能够进行多点搜索、计算升级和调整变异操作等技术层面的运作[14-15]。由于免疫遗传算法具有较好的计算随机性以及搜索能力,因此与自调整PID控制器互结合,能够有效的解决比例单元和积分单元中的误差,从而提高自调整PID控制器的工艺参数的控制能力。想要进行免疫遗传算法的单元调整需要进行单元的调试,由多维的数据单元进行系数化,转变为单一的数据单元,方便免疫遗传算法的使用,其公式为:

式中,SPPM表示转变后的比例单元;Tc表示单元的维数;p表示转换的匹配系数;aiε是对应的多维转变单维过程的差量;j表示在进行转变过程中会出现焓值差。
在基于免疫遗传算法优化的自调整PID控制器系统中,硬件使用的一般的是自调整PID控制器[16],所以就控制器的比例方程需要进行离散化,这样方便进行调用,公式为:
公式中,ϕ,f1,f2分为比例单元的3个要素,数据权值、积分函数、参数值域;Length(C)为比例单元参数熵;H为匹配函值。
免疫遗传算法就是对公式(2)中的v、I和μ进行寻优设计,保证比例多目标优化。传统的自调整PID控制器进行寻优处理职能进行单目标的寻优,很难同时兼顾3个单元指标,使用免疫遗传算法便可以实现多单元寻优,公式为:

由于自调整PID控制器的中数据的增益函数的计算比较复杂,使用免疫遗传算法对积分单元进行调整的程度不会很高,为了达到控制的效果,把平均积分单元中的误差进行降级排比,这样可以有效地避免平均误差的出现,公式为:
公式中:W为积分离散系数;L表示微积分的驾驭值;C1、C2、C3分别表示积分单元的数据上波动极限、下波动极限、数据传递项。使用免疫遗传算法对微积分单元进行调整,由于免疫遗传算法本身是针对数据,所以在微积分单元可以直接使用,公式为:
公式中:Kp、Ki、KD分别表示积分单元的正比例项、反比例项、权值项;K0表示其实积分函数,使用免疫遗传算法对比例单元进行调整,保证在回路中的计算数据不会出现目的误差,对积分单元进行调整,避免出现平均误差,使用免疫遗传算法对微分单元进行调整,解决了计算过程中出现透过误差,这样就优化了自调整PID控制器。优化过后的自调整PID控制器还需要进行一定的计算调整,这样才能从根本上解决数据控制精确度的问题。
1.3 交叉与变异算子调整
为了提高本文设计的基于免疫遗传算法优化的自调整PID控制器的数据控制能力,使用交叉变异算子对个单元进行调整,其数据交叉变异操作的排序是由矩阵实现的,公式为:

式中:Sx为单元的传递差值;A表示的是数据律动值;S-1表示的是通过矩阵能够进行倒叙排列;n的值域虽然有限,但是可以通过一定的硬件设备,提高其使用能力。对比例单元的调整过程为:

式(7)(8)中:为两种不同情况下的调整分类,PCMAX、PCMIN分别为调整的剩下极限值;PCMIN、PCMAX可以对变异率的上下极限进行调整;PC为数据交叉过程的适应度;P为变异个体的适应度。使用交叉与变异算子对积分单元进行调整,公式为
公式中:q表示使用交叉与变异算子对积分单元进行调整的结果,d表示积分函数的标准调整度,Δd表示的是积分函数的调整幅度;F表示的是积分变异率的影响;1表示的是积分单元数据交叉过程的适应度;为保证使用交叉与变异算子对微积分调整过程中的准确性,需要限定B在[0,100]值域内,公式为:

公式中:M、N分别表示微积分单元的计算卷积系数;β是一个使用常量,只是衡量计算结果的变化程度,通过β可以看出结果是否发生偏离;RS表示的微积分单元的数据交叉适应度;(1-R)n-s-1表示的是变异过程的适应度。
综上所述,文中设计的基于免疫遗传算法优化的自调整PID控制器,运用免疫遗传算法进行单元修正,有效的避免了目的误差、平均误差、透过误差的出现,有效地提高了各单元之间的计算能力,使用交叉与变异算子对各单元进行调整,避免由于单元连接问题,导致控制数据不精确,通过上述的调整,有效地解决了工艺数据控制不精确的问题。
2 仿真实验分析
为了测试本文设计的基于免疫遗传算法优化的自调整PID控制器能够在工艺数据上进行精确的控制,设计了对比仿真实验。试验是以某工厂车间的控制流产线为对象,使用传统的自调整PID控制器以及本文设计的基于免疫遗传算法优化的自调整PID控制器进行温度控制,为了保证实验的有效性,同时进行试验,并假设除系统外的环境因素都相同。
2.1 参数设定
为保证设计的基于免疫遗传算法优化的自调整PID控制器系统能够有效的进行数据控制,设置数据交叉过程的适应度PC为65.89;设置比例单元参数熵Length(C)为5.4;保证积分单元的数据上波动极限、下波动极限C1、C2在[0.78,1.35]的值域内;根据上述仿真设定的参量以及环境设定,进行实验,结果如下。
2.2 结果分析
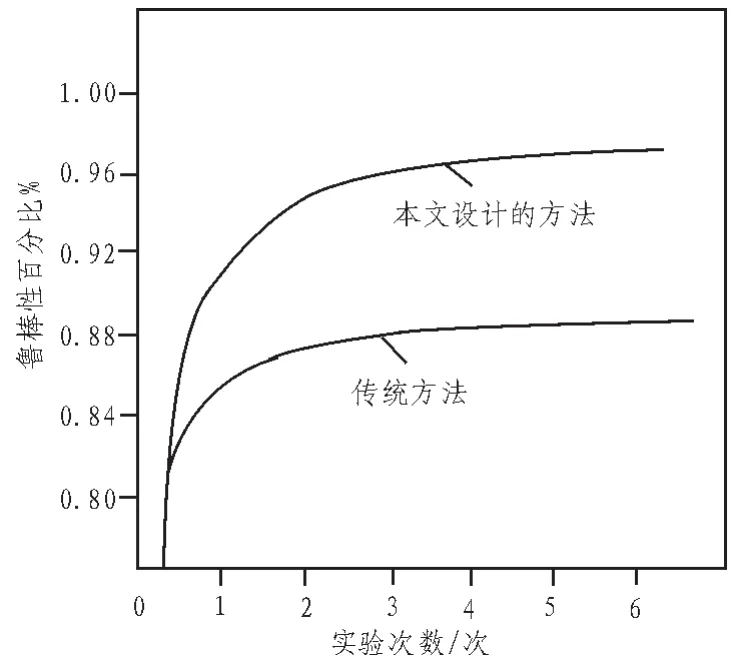
图2 鲁棒性对比试验结果
分析图2结果得知,文中设计的基于免疫遗传算法优化的自调整PID控制器,能够在试验的过程中具有较高的鲁棒性,有效地保证了控制数据的稳定性。鲁棒性高的系统其系统稳定程度也较高。

图3 系统数据波动结果
分析图3结果得知,本文设计的基于免疫遗传算法优化的自调整PID控制器,其数据的波动情况较小,说明能够有效地控制工艺数据。
综上所述,本文设计的基于免疫遗传算法优化的自调整PID控制器系统能够有效的控制工艺数据,在保持平稳的工艺数据变化率的情况下,保持较高的鲁棒性。有效解决了工艺数据控制不精确的问题。
3 结束语
针对传统自调整PID控制器容易出现误差的问题,提出一种基于免疫遗传算法优化的自调整PID控制器。该控制器通过免疫遗传算法,对比例单元、积分单元、微分单元进行优化,保证计算过程的有效性,避免了目的误差、平均误差、透过误差的出现,使用交叉与变异算子对单元之间进行调整,提高自调整PID控制器的单元协同性,有效解决工艺数据控制精度问题。所提方法对自调整PID控制器应用提供更多理论依据。
[1]王永兴,钱淑渠,叶永强.基于T细胞调节的免疫遗传优化算法对逆变器PWM控制序列的优化[J].计算机应用研究,2016(1):50-55.
[2]高峰,王伟,杨锡运.基于免疫遗传算法的风力发电机组变增益PI控制器参数整定与优化[J].动力工程学报,2016,36(1):22-29.
[3]吴陈,王和杰.基于改进的自适应遗传算法优化BP神经网络[J].电子设计工程,2016,24(24):29-32.
[4]刘艳雄,李杨康,华林,等.基于遗传算法精冲机快速缸液压伺服系统设计及PID控制优化[J].武汉理工大学学报(交通科学与工程版),2017,41(1):52-56.
[5]苏强,吴海龙,赖盛杰.基于免疫遗传算法的装配顺序优化[J].同济大学学报自然科学版,2015,43(6):944-950.
[6]王晓瑜,原思聪,李曼.基于自适应蚁群遗传混合算法的PID参数优化[J].计算机应用研究,2015(5):1376-1378.
[7]王晓瑜,原思聪,李曼.基于自适应蚁群遗传混合算法的PID参数优化[J].计算机应用研究,2015(5):1376-1378.
[8]任林杰,范多旺,杨军霞.基于GA优化模糊PID控制的ATO算法研究[J].铁道标准设计,2017,61(2):127-130.
[9]张娓娓,袁路路.基于遗传优化模糊PID算法的温室智能控制系统研究[J].农机化研究,2017,39(7):209-213.
[10]谢鹏,张红梅.基于自适应遗传算法的EHA控制器优化设计[J].传感技术学报,2016,29(6):909-914.
[11]王东风,韩璞.基于免疫遗传算法优化的汽温系统变参数PID控制[J].中国电机工程学报,2003,23(9):212-217.
[12]李晓斌,常蓬彬.基于自适应免疫遗传算法的真空退火炉变参数PID温度控制系统[J].兰州大学学报(自科版),2005,41(6):69-72.
[13]李育贤.基于免疫遗传算法的PID控制器参数优化研究[J].计算机仿真,2011,28(8):215-218.
[14]刘淑荣,李楠,庞伟.基于改进免疫遗传算法的PID参数优化仿真研究[J].长春工程学院学报:自然科学版,2016,17(4):89-91.
[15]曾玉金,齐春燕.基于免疫遗传算法优化的PID控制在交流伺服系统中的应用[J].微电机,2008,41(1):46-48.
[16]占自才.基于遗传算法的PID智能控制器设计[J].华东交通大学学报,2009,26(1):58-61.
The self-adjusting PID controller is optimized based on the immune genetic algorithm
ZHANG Zhi⁃bai,ZHU Min
(Changzhou College of Informa Technology,Changzhou213164,China)
For the purpose in traditional self⁃tuning PID controller circuits error,error of the mean and through error,data process control inaccurate problem,put forward a kind of self⁃tuning PID controller based on immune genetic algorithm(ga)optimization research plan.By immune genetic algorithm for self⁃tuning PID controller circuit unit and calculus,the integral optimization,effectively avoid the error of purpose,using adjustment of crossover and mutation rate control and differential control,effective control of the system stability,this reduces the average error and the error probability,ensure the control accuracy of process data,and effectively solve the above problems.In order to verify the design based on immune genetic algorithm to optimize the effectiveness of the self⁃tuning of PID controller,design the contrast simulation experiment,through the experimental data show that the design in this paper based on immune genetic algorithm to optimize the self⁃tuning of PID controller to control of the process data with high precision.
immune genetic algorithm;PID controller;differentialunit;proportionalunit;integral unit
HT13
A
1674-6236(2017)22-0006-04
2017-03-30稿件编号:201703328
江苏省教育厅《电气自动化江苏省品牌专业建设》(PPZY2015C237)
张志柏(1970—),男,江苏盐城人,副教授。研究方向:自动化控制与系统集成、智能控制与系统通信。
