一种低空目标分布式定位系统及其算法与实验研究
2017-12-01常跃跃陈建峰
常跃跃,陈建峰
(1.西北工业大学 航空学院,西安 710072) (2.西北工业大学 航海学院,西安 710072)
一种低空目标分布式定位系统及其算法与实验研究
常跃跃1,陈建峰2
(1.西北工业大学 航空学院,西安 710072) (2.西北工业大学 航海学院,西安 710072)
低空声源目标具有较强的隐身性,为了实现对此类目标的定位,构建基于TMS320C6713平台的分布式麦克风阵列低空声源定位系统。麦克风阵列节点以DSP为核心处理器,通过A/D芯片采样麦克风阵列接收到的信号,通过到达时间差(TDOA)计算声源的角度,利用测向交叉法,融合多个节点的角度信息,计算出声源的位置。结果表明:在时延估计精确的情况下,对低空目标具有较好地估计;系统具有较高的精度和稳定性,能够满足对低空声源目标进行定位的实际需求。
低空;分布式;声源定位;DSP;测向交叉定位法;TDOA
0 引 言
低空飞行目标由于其雷达反射面积小而具有较强的隐身性能[1],对低空声源目标的定位在军用和民用领域均具有较大的需求和应用市场[2]。随着传感器网络技术的发展,被动声源定位可以作为现有定位技术的补充,能对低空目标进行有效定位[3]。分布式麦克风阵列声源定位是指用麦克风拾取声音信号,通过对麦克风阵列的各路输出信号进行分析和处理,得到多个时延估计信息,再对这些数据进行融合,利用数学模型得到目标的位置。
目前,基于分布式麦克风阵列的声源定位技术,已广泛应用于空中被动声源定位、智能雷场、水下监控等[4]领域。美国、俄罗斯、以色列、英国、瑞典等国家在该领域起步较早,已研制出比较成熟的定位系统,例如美国的PALS被动声源定位系统、英国的Picker直升机报警器和瑞典的SORAS26声测系统等。20世纪90年代,我国才开始进行该领域的研究,但目前尚未有相对成熟的大型产品问世。仅在2007年,中国科学院声学研究所研制出了一种基于PC104小基阵系统的分布式实时被动声源定位系统[5]。
本文主要讨论针对低空目标的分布式实时被动声源定位系统(低空声源定位系统)的硬件设计,对系统所采用的测向交叉定向法进行仿真,并通过现场实验验证单点的定向效果。
1 系统硬件设计
本文设计的整个硬件系统是以DSP为核心电路对语音信号进行采集和处理。4路麦克风构成两个麦克风阵列,信号经过调理放大电路,并由A/D转换电路把调理后的模拟语音信号转换成数字语音信号,再送入DSP芯片处理,最终输出到PC机上。系统的硬件平台主要由DSP系统核心处理模块、目标信号调理模块、A/D采样模块、外扩存储器模块和外围电路等构成,其硬件设计原理框图如图1所示。
1.1 DSP系统核心处理模块
作为系统的核心模块,DSP芯片采用TMS320C6713,该芯片是TI公司推出的一种新型浮点DSP 芯片,主频可达200 MHz。其内部结构在 TMS320C62X的基础上进行了改进,集成了多个功能单元,可同时执行8 条指令,运算能力可达1 G FLOPS。芯片内具有丰富的外设,例如EDMA、EMIF、McBSP、HPI、GPIO等[6]。TMS320 C6713具有出色的运算能力、高效的指令集、智能外设、大容量片内存储器和大范围寻址能力,能够满足系统对某些复杂定位算法的快速处理。
1.2 目标信号调理模块
麦克风所拾取的声音信号太小,且易受环境噪声的影响,因此有必要对声音信号进行预处理,通过信号调理单元的处理,使之能够满足系统要求。本文选用的目标调理模块为运算放大芯片MC33204,该芯片为四运算放大器,具有功耗低、噪声低等优点。系统采用两级放大,最终可将信号放大到合适的大小。
1.3 A/D采样模块
麦克风阵列拾取声音信号,经过目标调理模块的处理,使声音信号达到A/D芯片采样的要求,从而进行模/数转换,完成数据采样。A/D转换器件选用TI公司的PCM4204,该芯片可以进行4通道、24位、高精度采样,采样速率可达216 kHz。该芯片具有音频串口和DSD数据接口,其中音频串口能与DSP方便连接,采样数据能够迅速地被DSP处理。
A/D采样模块根据TMS320C6713的硬件结构特点,采用EDMA方式通过TMS320C6713的McASP与ADC外设进行数据交换。EDMA方式不仅使数据传输速度快、传输量大,还不占用CPU时钟周期,使数据传输和DSP命令执行同步进行,大幅提高了整个系统的运行速度。A/D采样模块设计示意图如图2所示。
1.4 外扩存储器模块
大多DSP芯片内部都有内置存储器RAM和ROM,但对于许多DSP应用来说,这些存储空间远远不够。同时,程序和数据在掉电后无法保存,需要从外部加载程序,因此,通常需要进行片外存储器扩展。TMS320C6713的EMIF具有很强的接口能力,几乎能够与所有存储器实现无缝连接。EMIF的外部空间容量为64 MB,分为四个空间CE0~CE3,每个CE空间彼此独立,可以进行不同的访问控制[7]。本文通过EMIF 扩展两个存储空间,其中,数据存储空间(SDRAM)分配在CE0,程序存储空间(FLASHROM) 分配在CE1。
2 测向交叉定向与定位算法及分析
2.1 单节点定向算法
在利用麦克风分布式阵列进行定位前,需要先利用单个节点确定出一个声源的相对方向;然后将这个节点的方向结果进行测向交叉,从而得到声源的方位信息。单节点模型如图3所示,O为参考点,α为声源与二号麦克风连线同x轴正方向的夹角,麦克风阵元m1和m2的坐标分别为(d/2,0)、(-d/2,0)。
被动声源定位(Time Delay of Arrival,简称TDOA)估计技术具有较小的计算量和较高的精度,是一种常用的声源定位技术。本文选用互功率相位(Crosspower-Spectrum Phase,简称CSP)估计算法[8]。
在平面波传播模型中,麦克风对(m1,m2)的声源波达方向可由式(1)获得:
(1)
式中:d12、τ12分别为麦克风对(m1,m2)之间的距离和接收信号的相对延迟的估计值。
麦克风对之间的时延可以根据式(2)估计:
(2)
其中,

(3)
(4)
式中:X1(t,f)为接收信号x1(t)的频谱;φ12为归一化互功率谱;R12(t,τ)为互相关函数。
2.2 测向交叉定位法
在获得了两个节点计算得到的方向角之后,采用测向交叉定位法对声源进行定位计算。定位模型如图4所示。
(5)

(6)
令

(7)
C=[g1,g2,…,gn]T
(8)
(9)
式中:C为n×1的向量;H为n×2的矩阵。
利用最小二乘法[6],可得
(10)
3 仿真分析
3.1 仿真模型
系统的定位误差主要来自每个节点的定向误差,故着重对单节点定向算法进行仿真分析。所用算法的理论推导均按照以下假设建立阵列信号模型[9-10]:
(1) 接收的目标信号为宽带信号;
(2) 传播介质均匀且各向同性;
(3) 接收基阵位于信号源的远场,可近似认为接收到的信号为平面波;
(4) 接收阵元的几何尺寸远小于入射平面波的波长,且阵元无指向性,可近似认为接收阵元是点元;
(5) 接收阵元间距d远大于阵元尺寸,即阵元间的相互影响可忽略不计。
声源信号通常采用高斯宽带随机信号来模拟[9]。麦克风接收到的信号是声源信号经过传播衰减后到达阵元的信号。在阵列模型中,一旦声源位置确定,声信号到达各阵元的传播延时也是确定的,用理论方法可以计算得出该延时[11-12],继而可生成仿真需要的信号。
3.2 仿真条件设置
采样频率Fs=16 000 Hz,d=0.5 m,快拍数N=1 024,空气中声音传播的速度c=340 m/s,阵列为二元阵;仿真所用信号源为宽带信号,fl=500 Hz,fh=7 000 Hz;信号源位于αs方向,αs从0°到180°以间隔为1°增长变化;仿真时间测试平台:Vision台式机,操作系统Windows XP,主频3 GHz,内存1.75 G;MATLAB版本7.8.0(R2009a)。
3.3 结果分析
根据上述仿真信号的产生方式及仿真参数的设置,生成的宽带仿真信号的时域图和频谱图如图5~图6所示。
两个麦克风接收信号的互功率谱和互相关函数分别如图7~图8所示,可以看出:对于已知时间差的两个信号,利用互功率谱算法求出两个信号的互相关函数可以准确地检测出互相关函数最大值所在的位置,从而求出相应的时延τ12,进而求出声源相对于节点的角度θ。
假设已知声源与节点的相对角度为θ,代入式(1)得到两个信号的时延,利用MATLAB产生这两个仿真信号,再利用互功率谱算法求出一个角度,并与已知的θ进行对比,其结果如图9~图10所示。
从图9~图10可以看出:当声源相对节点的角度从0°~180°变化时,利用互功率谱法可以得到相应的估计角度;当假设角度在20°~160°范围时,估计误差小于3°;0°~20°和160°~180°时,估计误差最大达到9°。
4 单节点定位实验
4.1 实验环境
实验场地选择为农村空旷的空地,实验时间为13:30~16:00。由于距离公路较远,现场背景噪声属于安静级(40~50 dB),实验现场无风。实验现场图如图11所示。
4.2 实验设备
实验设备包括:一套基于平面四元十字阵的单节点定向系统;GPS接收器;发令枪两把(用于校准)。
单节点定向系统主要包括:平面四元十字阵,预处理电路节点控制板,多通道数据采集板,上位机PC。
4.3 实验过程及结果分析
单节点定向实验中,在距离阵列3 km范围内利用多个炮竹爆炸产生的声音作为声源,系统上位机采集声源信息、计算声源相对坐标并显示。在某一位置处,通过多次测量比较结果的稳定性,如表1所示,可以看出:系统对声源的定向基本可以保持稳定,但也会出现不同的结果。导致该误差的因素主要有两方面:一是由于实验前利用发令枪进行校准,校准过程存在一定误差;二是由于系统采用定向算法数学实现,延时估计具有离散型,致使单个麦克风阵的定向角度存在偏差。
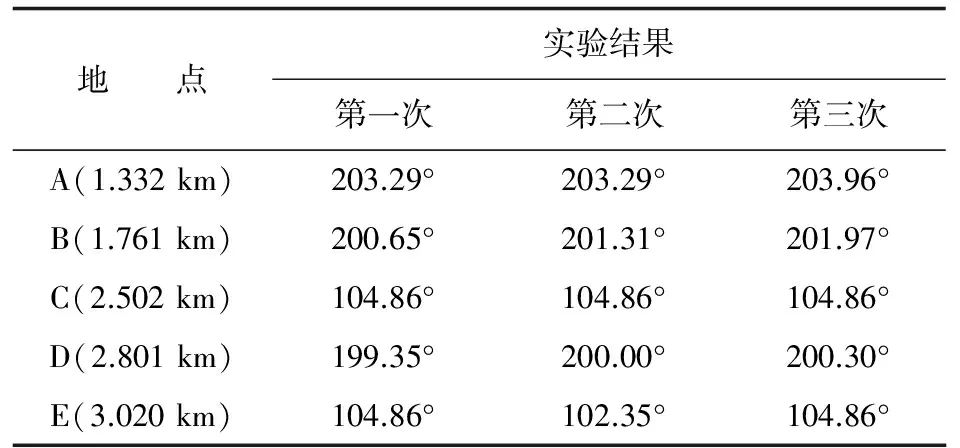
表1 单节点定向实验结果
5 结 论
(1) 本文针对低空声源目标设计了一套定位系统,该系统可以对现有定位系统进行有效补充。
(2) 通过仿真对系统所采用的定向算法进行了模拟,结果显示在时延精确的情况下,算法可以以较低的误差确定出目标的方向。
(3) 定向实验结果表明,本文设计的系统具有较强的稳定性和较高的精度,对低空目标声源定位具有较强的适应性。
[1] 张晓, 高勇. 一种用于低空声源目标超视距被动声定位的新方法[J]. 电子与信息学报, 2008, 30(5): 1136-1139.
Zhang Xiao, Gao Yong. A new algorithm for NLOS acoustic passive localization of low altitude targets[J]. Journal of Electronics amp; Information Technology, 2008, 30(5): 1136-1139.(in Chinese)
[2] 冯登超, 袁晓辉. 低空空域安全告警航图可视化研究进展[J]. 电子测量与仪器学报, 2015, 29(3): 305-316.
Feng Dengchao, Yuan Xiaohui. Advancement of security alarm aeronautical chart visualization in low altitude airspace[J]. Journal of Electronic Measurement and Instrumentation, 2015, 29(3): 305-316.(in Chinese)
[3] 牛新亮, 赵国庆, 刘原华, 等. 低空目标高精度无源时差定位方法[J]. 西安电子科技大学学报: 自然科学版, 2009, 36(5): 862-866.
Niu Xinliang, Zhao Guoqing, Liu Yuanhua, et al. High precision passive TDOA location method for low-altitude targets[J]. Journal of Xidian University: Natural Science, 2009, 36(5): 862-866.(in Chinese)
[4] Brandstein M S, Silverman H F. A practical methodology for speech source localization with microphone arrays[J]. Computer Speech and Language, 1997, 11(2): 91-126.
[5] 马驰州, 滕鹏晓, 杨亦春, 等. 分布式实时被动声定位系统研究[J]. 探测与控制学报, 2007, 29(1): 18-22.
Ma Chizhou, Teng Pengxiao, Yang Yichun, et al. Real-time passive localization by a distributed acoustic array system[J]. Journal of Detection amp; Control, 2007, 29(1): 18-22.(in Chinese)
[6] 汪安民, 程昱, 徐保根. DSP嵌入式系统开发典型案例[M]. 北京: 人民邮电出版社, 2007.
Wang Anmin, Chen Yu, Xu Baogen. Development of typical cases in DSP embedded system[M]. Beijing: Posts amp; Telecom Press, 2007.(in Chinese)
[7] 陶巍, 刘建平, 张一闻. 基于麦克风阵列的声源定位系统[J]. 计算机应用, 2012, 32(5): 1457-1459.
Tao Wei, Liu Jianping, Zhang Yiwen. Sound source localization system based on microphone array[J]. Journal of Computer Applications, 2012, 32(5): 1457-1459.(in Chinese)
[8] 马驰, 陈建峰, 叶永. 基于四元十字阵的分布式声源定位实验研究[J]. 传感器与微系统, 2013, 32(11): 52-54.
Ma Chi, Chen Jianfeng, Ye Yong. Experimental study on distributed acoustic source localization based on four-element cross array[J]. Transducer and Microsystem Technologies, 2013, 32(11): 52-54.(in Chinese)
[9] 程萍, 陈建峰, 马驰, 等. 十字阵短时宽带声源实时定向算法[J]. 应用声学, 2012, 31(1): 123-129.
Cheng Ping, Chen Jianfeng, Ma Chi, et al. A fast short-time broadband acoustic source direction estimation algorithm using cross array[J]. Applied Acoustics, 2012, 31(1): 123-129.(in Chinese)
[10] 杨凌云, 谢小娟. 基于声音能量的单目标定位[J]. 长春工业大学学报: 自然科学版, 2007, 28(2): 202-205.
Yang Lingyun, Xie Xiaojuan. Single target localization based on the acoustic energy[J]. Journal of Changchun University of Technology: Natural Science Edition, 2007, 28(2): 202-205.(in Chinese)
[11] 陈萍. 稳健的宽带声源实时定向技术研究[D]. 西安: 西北工业大学, 2012.
Chen Ping. The performance study of robust real-time wide band acoustic source localization method[D]. Xi’an: Northwestern Polytechnical University, 2012.(in Chinese)
[12] 黄晓利, 王福豹, 段渭军, 等. 无线传感器网络TDOA测距误差分析与校正[J]. 计算机测量与控制, 2008, 16(7): 1053-1056.
Huang Xiaoli, Wang Fubao, Duan Weijun, et al. Error analysis and calibration of TDOA ranging for wireless sensor networks[J]. Computer Measurement amp; Control, 2008, 16(7): 1053-1056.(in Chinese)
常跃跃(1989-),男,硕士,助教。主要研究方向:无线传感器网络与声源定位。陈建峰(1972-),男,博士,教授。主要研究方向:无线传感器网络与声源定位。
(编辑:马文静)
ADistributedAcousticLocalizationSystemforLowAltitudeTargetsandItsAlgorithmandExperimentalResearch
Chang Yueyue1, Chen Jianfeng2
(1.School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China) (2.School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China)
Low altitude targets are of a strong stealth. In order to localize such targets, a distributed sound source localization system for low altitude targets based on the platform of TMS320C6713 is constructed. In the system, digital signal processor(DSP) is the core processor and signals
by the microphone are sampled via Analog/Digital(A/D) chips. The direction of the sound source is calculated through time different of arrival(TDOA) and the angles of each node are fused by direction finding cross localization method to calculate the position of the sound source. The simulation results show that the algorithm has good effectiveness when the time-delay estimation is accurate. The experimental results show that the system has high precision and stability and can meet the needs of the practical applications for low altitude targets.
low altitude; distributed; sound source localization; DSP; direction finding cross locating method; TDOA
2017-03-13;
2017-04-26
常跃跃,cyy@nwpu.edu.cn
1674-8190(2017)04-444-06
TN912.3
A
10.16615/j.cnki.1674-8190.2017.04.012