基于改进GAC模型的充电插座定位研究
2017-11-30甄倩倩张庭亮
甄倩倩,张庭亮
(1.安阳师范学院 软件学院,河南 安阳 455000;2.安阳工学院 电子信息与电气工程学院,河南 安阳 455000)
基于改进GAC模型的充电插座定位研究
甄倩倩1,张庭亮2
(1.安阳师范学院 软件学院,河南 安阳 455000;2.安阳工学院 电子信息与电气工程学院,河南 安阳 455000)
为了达到机器人自主充电的目的,需要定位墙壁上的充电插座,文章采用一种改进的GAC模型算法对插座图像进行定位,该模型能够克服传统的GAC模型欠定位的缺点。在真实取景的图像中进行实验,实验结果表明,改进的GAC模型算法在插孔定位上具有可行性、快速性和准确性。
机器人;GAC模型;插座定位
近几十年来,科学家对人工智能的研究从未停止,机器人作为人工智能中重要的研究领域,近些年也取得了一定的成果。“机器人革命”有望成为“第三次工业革命”的一个切入点和重要增长点,其研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志[1]。随着人类对智能家居的要求,服务机器人走入千家万户。但目前为止,大部分移动机器人都采用可充电蓄电池组来给机器人自身供电,通常只能维持几个小时的工作时间[2]。因此,当电量降低到某种程度时,让可移动机器人自主充电,成为亟待解决的问题。机器人完成自主充电的首要任务是定位出墙壁上的充电插孔。因此,本文针对移动机器人自动定位充电插孔算法的研究具有重要的理论和应用价值。
充电插孔定位的关键是将插孔和墙壁分割。近些年,很多学者对图像定位技术进行了深入的研究,并取得了很多成果。罗希平等[3]介绍常见的图像定位类别有:阈值定位、边缘检测、统计学定位方法等。每个类别中又包含很多具体的定位方法,几何活动轮廓(geometric active contour,GAC)模型就是其中的一种。GAC模型是基于曲线演化和水平集理论的方法,该模型能够克服参数活动轮廓模型依赖自由参数的缺陷[4]。并且,该模型对初值位置不敏感、具有稳定唯一的数值解等。几何活动轮廓模型的这些良好特性已经引起了人们越来越多的关注[5]。目前,GAC模型在图像定位中已取得很好的实验效果[6],但该模型对噪声比较敏感,容易欠定位,若进行平滑去噪又会导致图形的过定位[7]。文中采用GAC模型算法对充电插孔定位进行分析研究,从而确定该算法在充电插座定位方面的可行性、精确性和有效性。
1 几何活动轮廓模型
1997年,Caselles等[8]提出了一种不含自由参数的GAC模型。GAC模型能量函数为:

C(s)函数为闭合曲线C,L(C)为C的弧长,s为弧长参数,∇I为图像I的梯度。应用变分法求极值,该模型所对应的梯度下降流为:

其中,k为曲线C的曲率,N是曲线C的单位法矢量,g如式(2)中的边缘指示函数:

式(3)中k1为反差常数,对边缘函数g的下降速率加以控制。
式(2)中,GAC模型演化时,受内外两种力的支配,其中内力,是指曲线自身的曲率运动,曲率运动的强弱由图像的标量场g(x,y)的控制。在图像边缘附近时,该力会变得很小,以致“停止”。而外力是指梯度∇g。GAC模型当对象有较深的凹陷边界时,GAC模型可能会停止在某一局部最小值状态,为了解决这一问题,王大凯等[9]提出一种推广GAC模型,并且该模型已经应用在文献[10]以及文献[11]中,该模型梯度下降流为:

式(4)中的c为可选常数。该模型中引入的力能够加快曲线演化速率,且可以使曲线收缩到图像深凹区域边界。
本文采用改进的GAC模型进行充电插座的定位过程为:首先对插座图像进行读取,之后开始构造能量函数,引入非负常数项,求出梯度下降流函数,引入嵌入式函数,采用迎风方案求解水平集演化方程,设置相应的参数,水平集曲线演化,最终定位出结果。
2 实验结果及分析
实验环境为:算法的实验环境为:CPU为Intel(R)Core(TM)i5-7200,内存为8 G,操作系统为Windows10,编译环境为MATLAB R2015a。实验数据:苹果iphone6s手机所拍摄的室内墙壁图片。当迭代步长为0.02,常数速度为13时,插座图像原图如图1所示。通过改进GAC模型的Matlab程序对插座图像定位过程如图2所示。从图2(l)可知,该改进的GAC模型能够准确定位出插座的插孔。

图1 插座图像原图

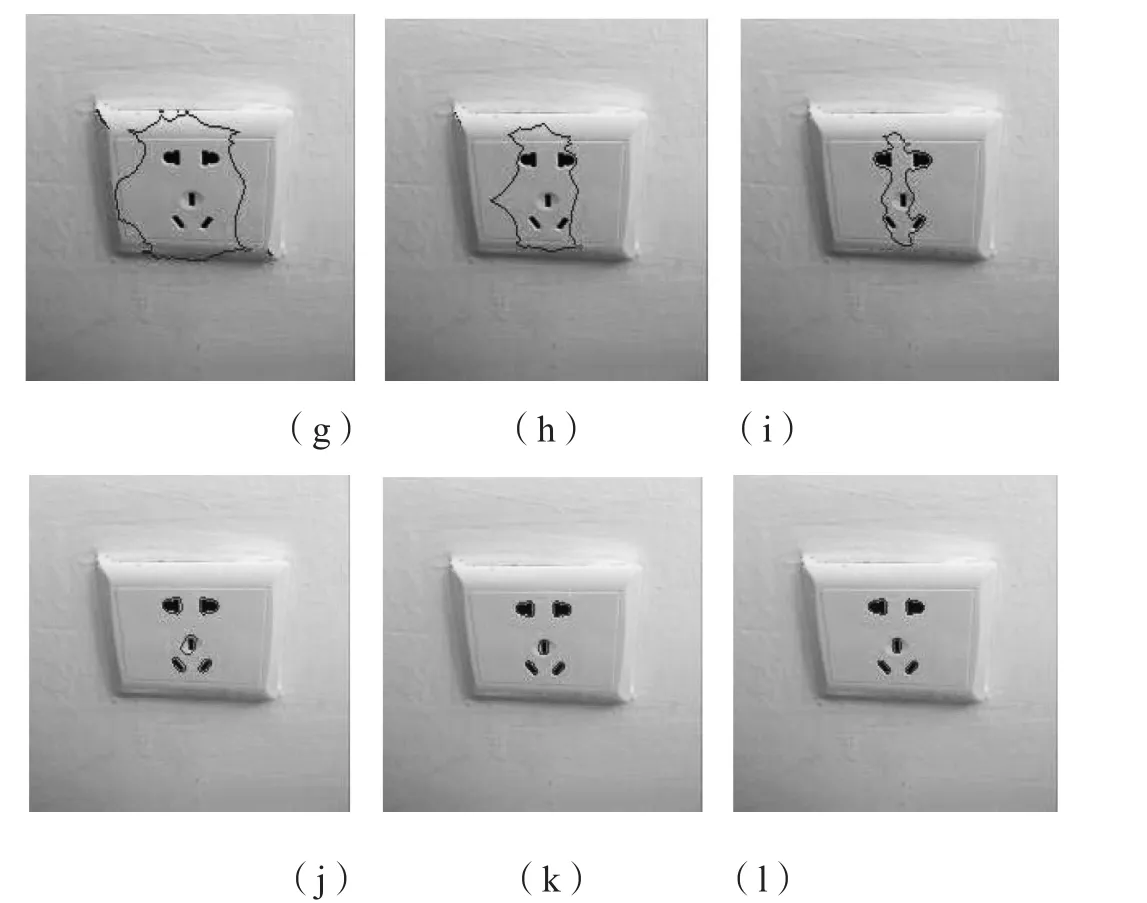
图2 插座图像定位分割过程
3 结语
本文主要介绍改进的GAC算法,并用该算法进行充电插座的定位,实验结果表明,该方法可行、定位准确且快速。通过该方法,能够准确定位充电插座,为可移动双目视觉机器人自主充电提供了条件。但本文中所采用的改进的GAC算法中若用固定的常数c来定位所有的图像不太现实,所以常数c的选择,是图像边界定位的难点,也是改进GAC模型方面的研究方向。
[1]曲道奎.中国机器人产业发展现状与展望[J].中国科学院院刊,2015(3):342-346.
[2]万树春.基于双目视觉的充电插座目标定位算法研究[D].长春:吉林大学,2015.
[3]罗希平,田捷,诸葛婴,等.图像定位方法综述[J].模式定位与人工智能,1999(3):300-312.
[4]杨松,罗培,罗浩元,等.基于改进的GAC模型图像定位算法[J].光学技术,2016(2):185-192.
[5]陈波,赖剑煌.用于图像定位的活动轮廓模型综述[J].中国图象图形学报,2007(1):11-20.
[6]唐利明.基于GAC模型的自适应图像定位算法[J].小型微型计算机系统,2010(6):1223-1225.
[7]林锦.一种结合CV与GAC模型的物体轮廓提取方法[J].福州大学学报,2014(3):387-392.
[8]CASELLES V,MOREL J M,SAPIRO G.Geodesic active contours[J].Computer Vision and Image Understanding,1997(1):61-79.
[9]王大凯,侯榆青,彭进业.图像处理的偏微分方程方法[M].北京:科学出版社,2008.
[10]孙颖,张新长,康停军,等.改进GAC模型在点云和影像自动提取建筑物边界中的应用[J].测绘学报,2013(3):337-343.
[11]白雪冰,许景涛,宋恩来,等.基于改进GAC模型的木材表面缺陷图像定位[J].福建林业科技,2016(3):105-111.
Research on electrical socket location based on improved GAC model
Zhen Qianqian1, Zhang Tingliang2
(1.Software Engineering School, Anyang Normal University, Anyang 455000, China;2.Electronic Information and Electrical Engineering School, Anyang Institute of Technology, Anyang 455000, China)
In order to achieve autonomous charging of robots, it is necessary to locate the charging socket on the wall. In this paper, an improved GAC model algorithm is used to locate the socket image. This model can overcome the shortcomings of traditional GAC model.Experimental results show that the improved GAC model algorithm is feasible, fast and accurate in socket orientation.
robot; GAC model; socket location
甄倩倩(1988— ),女,河南开封人,助教,硕士;研究方向:智能信息处理。
