基于图像传感器的太阳光斑质心坐标获取
2017-11-30高伟高丽西安工业大学电子信息工程学院
高伟 高丽 西安工业大学电子信息工程学院
基于图像传感器的太阳光斑质心坐标获取
高伟 高丽 西安工业大学电子信息工程学院
使用图像传感器拍摄太阳光斑,对其进行图像处理和质心坐标检测,并且对该坐标进行误差分析,最后在单片机上的图像传感器-LCD模块实现质心坐标的实时性获取。实验结果表明该方法可以准确地找到质心坐标,得出的结果在误差范围内,并且在图像传感器-LCD模块上实现了该过程。该方法适用于太阳自动跟踪系统,也可在其他目标检测中予以应用。
太阳光斑 图像处理 质心坐标 图像传感器—LCD模块
1 引言
在太阳能的实际应用当中,存在着光照方向时间不断变化等问题,这些问题影响和阻碍着太阳能技术的普及和发展,直到太阳自动跟踪系统的出现才为这一问题提供了新的解决途径。
为了实现太阳光的跟踪,首先就要获取到太阳的位置。太阳跟踪的方法分为两种:光电跟踪和图像传感器跟踪,传统的光电式跟踪容易受到光线的干扰,影响太阳位置的跟踪精度。因此本文采用图像传感器—LCD模块检测太阳位置坐标,这种方法可以准确地获得太阳光斑位置信息,实现了对太阳运动的实时检测。
2 系统总体设计
该系统主要由图像采集装置、图像传感器、单片机、PC机等部分组成。总体设计框图如图1所示。
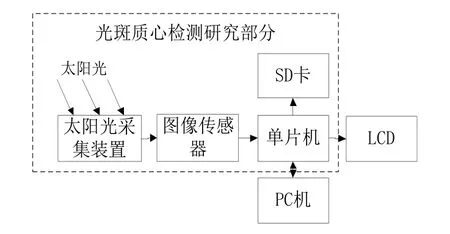
图1 系统整体框图
图1中的虚线框部分是对太阳光斑进行图像处理、质心检测的研究。具体流程为:把拍摄的光斑图像由单片机存储至SD卡,之在电脑进行图像处理,用以验证质心坐标的精度。
之后在单片机上的图像传感器—LCD模块内实现质心检测算法,得到直观的光斑处理效果以及太阳光斑质心坐标。
3 太阳光采集装置的设计与硬件连接
3.1 太阳光采集装置的设计
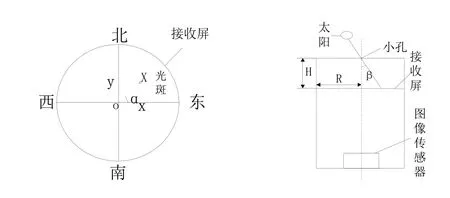
图2 采集装置示意图
由图2可以看出:太阳光经小孔进入采集装置内部在接收屏上形成太阳光斑图像,之后在装置底部的图像传感器拍摄接收屏上的光斑图像,得到坐标参数。其中R为接收屏的半径,H为接收屏与顶端的距离。该采集装置可以安装在极坐标式跟踪系统之内,实时地检测太阳的位置。
3.2 硬件连接
本系统的硬件包括带有图像处理功能的STM32F4单片机、3.2寸LCD、OV7670图像传感器。硬件连接图如图3所示。
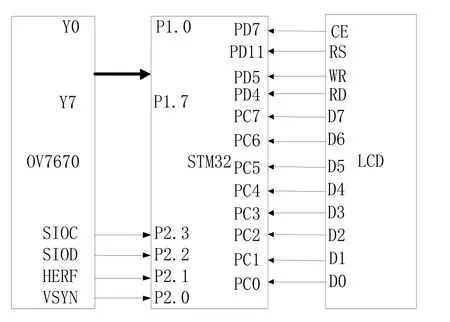
图3 硬件连接图
OV7670中的YO—Y7接口可以把接收屏上的光斑图像输出给单片机,SOID接口可以使太阳光斑图像保存在SD卡上。在LCD方面,读取到光斑图像之后,通过WR接口把图像显示在LCD上。
4 光斑处理研究与软件实现
4.1 光斑处理研究
把采集到的太阳光斑保存至SD卡里,之后在计算机上用MATLAB对其进行图像处理。本文所需要的图像处理过程主要分为以下几个步骤:
(1)采用中值滤波对原始图像进行图像增强,目的是排除原始图像中含有的电子干扰噪声。
(2)由于太阳光在不同时刻亮度会发生变化,因此采用最大类间方差法进行二值化处理,这种方法不受亮度和对比度的影响,对于太阳光斑的实时性处理而言最适合。图4为光斑处理效果。
图4 最大类间方差法二值化图像
(3)光斑质心的提取
信息化建设是高校走向新世纪的必经之路,高校在软硬件两个方面均做出了很大努力,虽在前进中取得可喜可贺的成绩,但也仍然存在着亟待解决的问题:校园网基础设施老化、校园网机房条件亟待改善、异地灾备系统尚未建设、源数据质量有待提升、教学资源平台等部分重要业务系统尚未建设、管理信息化平台需进一步互联互通。
一般的质心处理算法有以下两种:
i.质心法
该方法是太阳光斑进行图像一阶矩的计算,扫描上一步处理的太阳光斑图像,提取出像素值等于1的坐标然后根据以下公式进行计算:
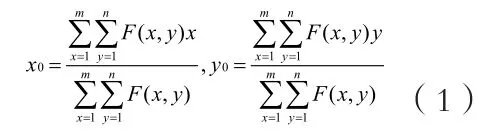
其中(x0,y0)为计算的质心坐标。质心法计算简单,但对噪声比较敏感,抗干扰能力弱。
ii.圆的拟合算法
因为太阳传感器采集到的太阳光斑为近似圆形,因此可以对光斑图像进行拟合得出质心参数。首先对图像进行canny边缘检测,之后扫描那些坐标值为1的点,完成光斑边缘轮廓点的提取,最后进行最小二乘法圆的拟合。其中(x1,y1),(x2,y2)…(xn,yn)为边缘点的像素坐标。这种方法寻找质心精度高,缺点是需要大量算法,从而给单片机实时性处理带来了一定的困难。
圆的方程为:

取残差为:

式中,(xi,yi)为图像边界点坐标。
残差平方和为:

之后求残差平方和的偏导数:
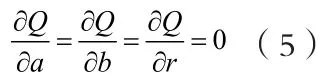
由上式可推导出圆心坐标的值(a,b)。即可得到光斑的质心坐标。两种方法求得的坐标参数如表1所示。
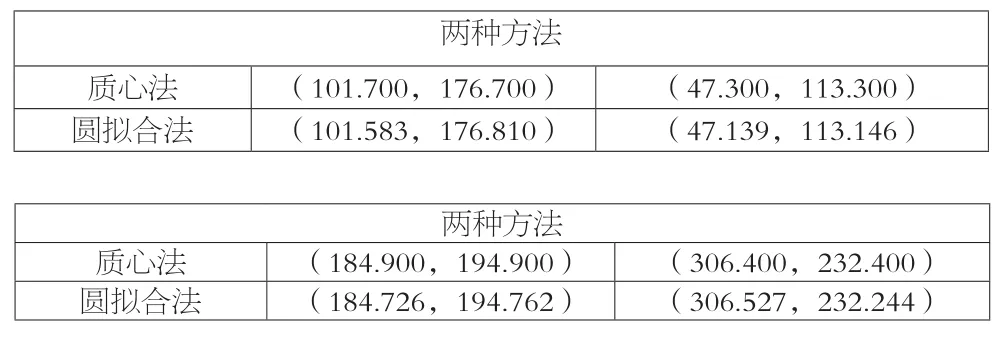
表1 为两种方法求得的太阳光斑质心坐标(4组)
两种质心提取方法的误差指标如表2所示。

表2 各个算法的误差指标(单位:像素)
由于进行了图像处理,因此要对图像处理后的光斑质心参数进行误差分析。在LCD屏幕上,像素点坐标为整数,即误差标准lt;1个像素。若以误差小的拟合法为误差标准,质心法相对于拟合法的误差如表3所示。

表3 以拟合法为标准的误差分析(单位:像素)
由表1和表3可以看出质心法相比较于最小二乘圆拟合法,X轴方向误差在0到0.1605个像素,Y轴方向误差在0到0.1533个像素。可以得出,通过图像处理,质心法误差为0.1个像素,与表2的误差参考一致,处理结果在误差范围内。
4.2 软件实现
通过误差分析,考虑到单片机的运行速度,本文选择编写算法更少的质心法作为图像传感器-LCD模块获取太阳光斑质心的算法。坐标获取流程如图5所示。

图5 图像传感器-LCD模块获取坐标流程图
LCD图像处理结果和串口坐标显示如图6所示:
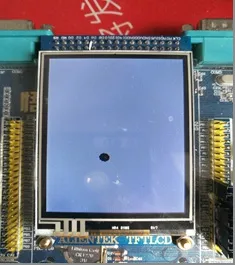
此次图像传感器—LCD模块处理图像速度为10帧/s,满足了跟踪太阳的实时性要求。
5 结论
在太阳自动跟踪的系统中能否准确检测出太阳光斑质心位置是实现太阳跟踪的关键,决定着系统的精度和可靠性。本文设计的基于图像传感器的质心坐标获取系统,可以实现从图像传感器采集太阳图像,并准确计算出光斑质心位置的图像坐标。相比较于其他类似系统,该方法检测方便,适用性强,可应用于极轴式太阳自动跟踪装置,也适用于其他相似的目标检测系统。
[1]基于视觉的太阳光线自动跟踪装置[J].刘丽微《沈阳工业大学》2008
[2]苑玮琦,金晶晶.基于图像传感器的太阳方位检测系统研究[J].传感器与仪器仪表,2007(23):1402142.
[3]基于图像处理的太阳跟踪控制系统研究与开发[J].刘淼生.《华中科技大学》.2011
[4]基于ARM嵌入式图像处理平台的太阳跟踪系统[J].陈丽娟,周鑫.现代电子技术.2012(04)
[5]基于改进最大类间方差法的灰度图像分割[J].王璇,张帆,程京.《微计算机信息》,2010,26(35):206-207
[6]极坐标跟踪式阳光输送机的研究与设计[N].宁铎,姚娜.《工程设计学报》2014.6
高伟,1992年10月出生,男,汉族,陕西咸阳人,在读硕士,主要研究方向为太阳能跟踪技术。E-mail:798712593@qq.com。
